
12月7日,来自德国慕尼黑工业大学和中山大学的研究团队在国际知名学术期刊《Science Robotics》发表研究文章(research article)——“Lateral Flexion of a Compliant Spine Improves Motor Performance in a Bio-Inspired Mouse Robot”。该研究详细探究了柔性脊柱在老鼠等哺乳动物运动中的重要作用,并以此为启发,开发了一款老鼠机器人(NeRmo, Neurorobotics Mouse)。研究团队提出了柔性脊柱的建模方法,以及基于脊柱的多种运动步态和控制算法,并全面提升了老鼠机器人的平衡能力,运动速度,以及灵活转弯能力。
这项研究融合了生物学、机器人学和计算机科学等多个学科的交叉知识。论文作者包括来自德国慕尼黑工业大学的邴振山(Zhenshan Bing)博士,研究生Alex Rohregger,Florian Walter博士,黄裕泓(Yuhong Huang),Peer Lucas,Fabrice Morin博士和Alois Knoll教授,以及中山大学计算机科学学院黄凯教授。
图1 论文首页
图 2 Science 官网首页头条报道
▍为什么研究仿生老鼠机器人?
老鼠,作为哺乳类动物中最常见的一员,长久以来一直是神经生物学领域的重要研究对象。而老鼠机器人则可以较好地结合神经生物学和机器人学的交叉研究。从科学研究角度,老鼠机器人可以辅助神经生物学研究,也可以应用神经生物学知识来实现更好的运动控制。从实际应用角度,老鼠机器人又因为其小巧结构外形,灵活的运动能力,可以应用于多种如灾后救援,检修维护等多种场景。下图展示了老鼠机器人多样的研究方向,包括:运动控制、环境感知、路径规划,以及基于肌肉和骨骼模型的建模方法。
图 3 老鼠机器人研究愿景示意图,展示了多种老鼠机器人研究的相关方向
▍老鼠机器人的特色之处
NeRmo是一款微型四足机器人,模仿了常见啮齿动物的肌骨骼解剖结构、外貌和运动模式。其机械设计和驱动系统的概述如图所示。NeRmo因以下几个独特之处而引人注目:1)NeRmo拥有完全柔性的脊柱,可以在横向和矢状平面上实现平滑的弯曲;2)NeRmo具备柔性的膝盖和肘部关节,由肌腱驱动;3)NeRmo的电机-肌腱驱动系统模仿了四足动物的肌肉骨骼特征。NeRmo的物理特性包括全长405毫米,肩胛骨到骨盆的长度为117毫米,高度91毫米,宽度90毫米,重量仅225克,采用耐用的PA12聚酰胺材料。在运动能力方面,NeRmo具备13个自由度,可实现多种灵活的运动,包括旋转的髋关节/肩部和弯曲的膝盖/肘部,以及横向和矢状弯曲的脊柱,水平旋转和俯仰的头部,以及横向弯曲的尾巴。电子设备方面,NeRmo搭载了一块7.4伏特、1000毫安时的锂聚合物电池,配备肌腱和伺服电机(HD DSM44)作为执行器,控制器采用树莓派Zero和STM32,同时还具备摄像头和关节编码器传感器,实现高级感知和运动控制。
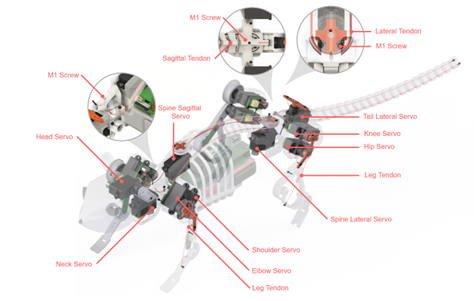
图 4 老鼠机器人结构示意图
NeRmo的脊柱采用一体化3D打印加工方式,能进行横向和纵向的弯曲活动,这两种弯曲变形由四个交替排列的关节支持,模仿了生物脊柱中的球窝关节。这种设计形成了一个由八个关节组成的高度灵活且结构稳固的脊柱,能够承受较大的重量。这一特性使NeRmo在众多拥有简单旋转关节脊柱的四足机器人中脱颖而出。NeRmo的脊柱是通过肌腱-滑轮系统驱动的。两条横向弯曲的肌腱穿过每个椎骨的侧孔,一端连接到横向弯曲伺服,另一端则由M1螺丝固定。因此,类似于肌肉收缩的效果,伺服的旋转可以拉动肌腱,从而使脊柱向左或向右横向弯曲。
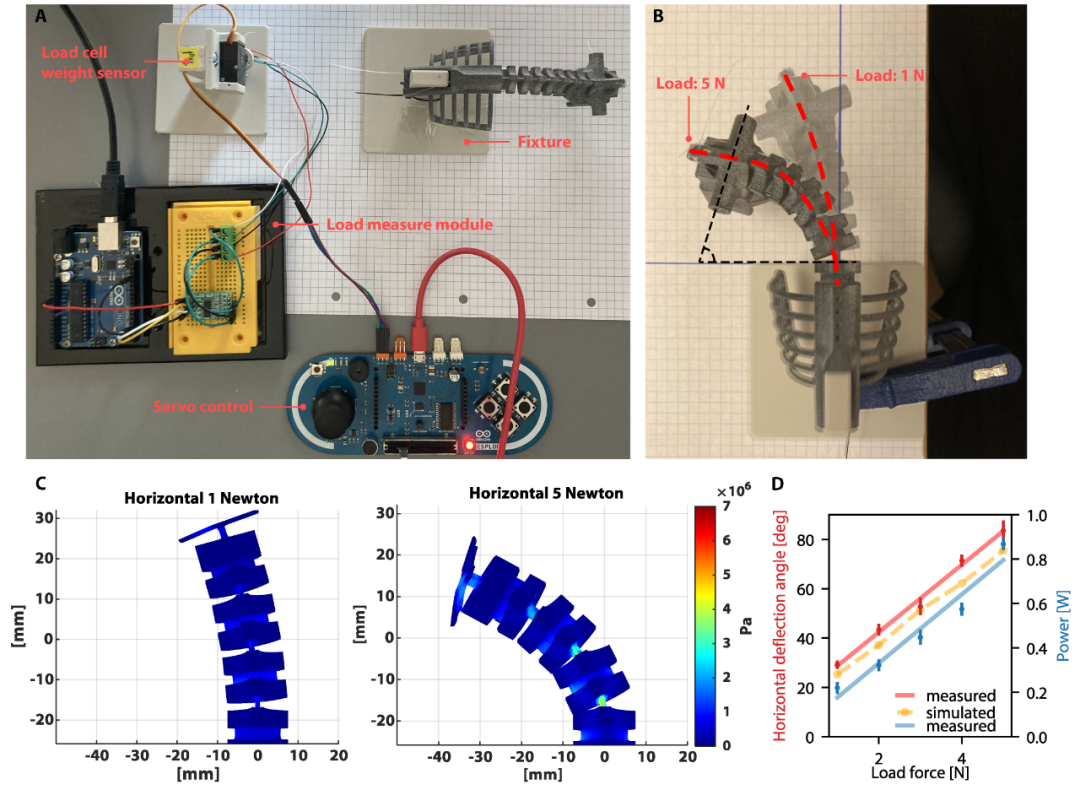
图 5 柔性脊柱刚度测试实验结果
▍研究贡献
这项研究揭示了灵活脊柱对于提升足式机器人运动能力中的重要性,特别是在提高敏捷性方面起着至关重要的作用。尽管四足机器人的研究已经取得了长足的发展,各种足式机器人也可以应对多种复杂多变的地形,但相比于自然界中的动物来说,机器人的运动能力还远远不足。其中一个重要的原因就是四足机器人只能单纯的依靠四肢运动,而无法像动物一样依靠其灵活的躯干进行更为复杂的动作。在本项研究中,研究人员以老鼠机器人为实验平台,深入探究了灵活弯曲的脊柱可以有效地提升机器人的运动能力。该研究的主要贡献如下。
1) NeRmo通过柔韧脊柱的侧向弯曲来调节身体重心位置,进而提升机器人的静态稳定性。
2) NeRmo通过脊柱的侧向弯曲来有效地提升不同步态的步幅,进而有效地提高行走速度。
3) NeRmo借助其灵活的脊柱弯曲,提升其在小转弯半径能力和转弯速度。
▍贡献一:柔性脊柱弯曲提升机器人静态稳定性
自然界中的动物可以有效地通过调整身体姿势提升自身的稳定性,例如老鼠或者猫狗等动物在失去一条腿的情况下,仍然可以保持行动能力。

图 6 通过三只脚站立的老鼠 (Photo courtesy of Snyman Brenda)
受此启发,研究团队开发了一种基于脊柱平衡补偿机制(Spine balance compensation, SBC),并通过一系列实验验证其作用。这一机制通过侧向脊柱的弯曲来调整重心(Center of Mass, CoM),保证了机器人在最初不稳定的状态下仍能保持静态稳定。实验过程和结果如下:首先,NeRmo机器人被设置在一个稳定的四足站立状态。之后机器人的逐次抬起四肢,进而转换至三足静态接触状态。在此状态下,抬起的腿在肩部或臀部关节的全运动范围内摆动,并同时测试启用和未启用SBC的效果。"实验结果表明,当没有启动SBC时,机器人由于重心超过支撑面而无法保持三腿站立的平衡。然而,启动SBC之后,NeRmo机器人能够有效地保持平衡。

图 7 在脊柱SBC的作用下,机器人可以保持三足站立的稳定性
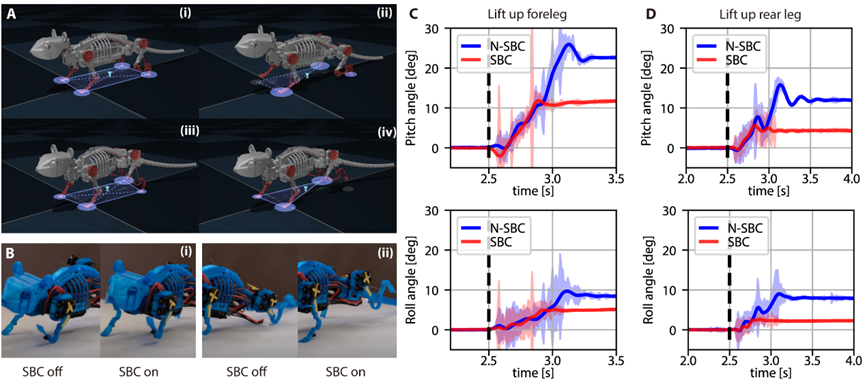
图 8 静平衡实验结果
▍实验二:柔性脊柱弯曲提升机器人运动速度
如下图X-ray照片所示,老鼠在运动过程中通过不断地摆动脊柱来协调四肢运动,进而保持一个良好的运动效率。
图 9 实验小白鼠运动步态的X-ray图(Image courtesy of Prof. Martin S.Fischer,Institute of
Zoology and Evolutionary Research, Friedrich Schiller University Jena)受此启发,研究团队提出了基于脊柱的直线运动步态和相关的控制算法,并成功揭示了利用脊柱侧向弯曲以提升行走速度的方法。其基本原理如图所示,我们观察到:a) 基于脊柱的步态的步幅大于标准步态b) 由于脊柱的弯曲,基于脊柱的步态的摆动腿轨迹与标准步态的直线轨迹相比呈现出特征性的曲线形状。
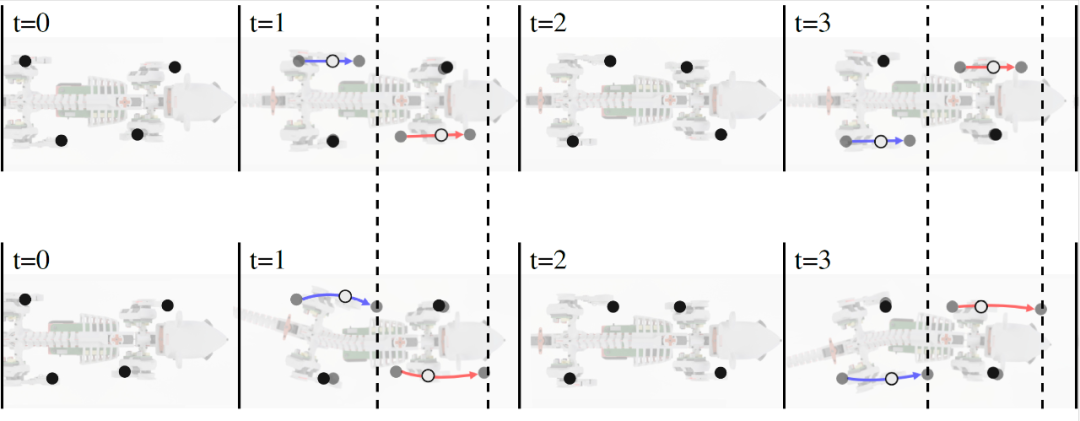
图 10 一个运动周期下,足部轨迹的示意图
论文中详细展示了在不同步态频率下的行走速度,这些数据是在真实环境中获得的。实验测试了六种不同的步态配置,涵盖了带脊柱和不带脊柱的理想小跑(分别标记为“trt,s”和“trt,ns”)、带脊柱和不带脊柱的步行小跑(分别标记为“walk,s”和“walk,ns”)以及带脊柱和不带脊柱的侧向行走步态(分别标记为“lat,s”和“lat,ns”)。研究表明,在不同频率不同步态的大量实验中,机器人的速度增幅从8%到17%不等。研究团队观察到,脊柱辅助的步态比常规步态具有更大的步幅。与标准步态的直线轨迹相比,脊柱辅助步态中摆动腿的轨迹展现出独特的曲线形态,这主要是由于脊柱的弯曲所引起的。这些在真实世界中的结果不仅验证了模拟测试的结果,也显示了相同的趋势。
图 11 在脊柱作用下,机器人在多种步态测试中均有效提升了运动速度
▍实验三:柔性脊柱弯曲提升机器人转弯能力
下图展示了老鼠在转弯运动过程中脊柱的作用机理,通过扭转脊柱来调整身体方向。
图 12 实验小白鼠转弯和脊柱的运动图 (Image courtesy of Prof Satoshi Oota, RIKEN, Japan)
受此启发,研究人员提出了基于脊柱和腿部相结合的混合式转弯步态,验证了脊柱可以有效提升机器人的转弯能力。
在这项研究中,团队展现了脊柱引入所增强的转弯能力。实验考察了三种转弯策略:基于腿部的转弯、基于脊柱的转弯以及混合式转弯。在基于腿部的转弯策略中,机器人通过调整每侧步幅的长度来控制运动,这种做法会产生非对称的接触力分布,在重心周围生成偏航力矩。与之相对的,基于脊柱的转弯策略则利用脊柱的侧向弯曲来引导机器人,这种方法与某些生物的自然行为类似。而混合式转弯策略则融合了基于腿部和基于脊柱的两种方法。下图分别展示了基于腿和脊柱的两种转弯策略。
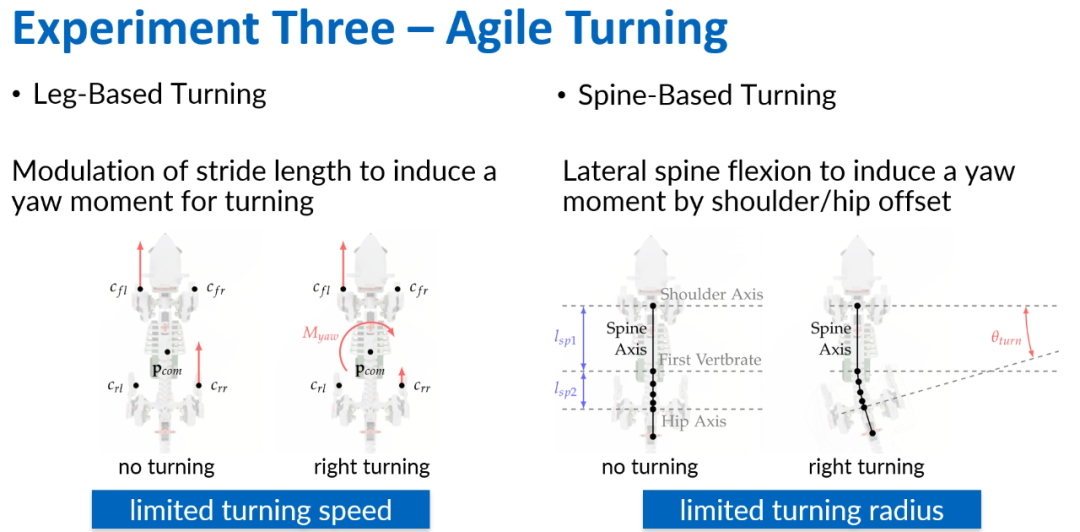
图 13 机器人转弯步态示意图
研究结果显示,在所有测试的步态频率和类型中,基于脊柱的侧向弯曲转弯在各种转弯轨迹下均实现了最高的速度,较基于腿部的转弯快大约20%到30%。而采用混合式转弯策略的速度也表现优越,仅略低于完全依靠脊柱驱动的转弯。在现实应用场景中,混合式转弯策略展现出最优的最小转弯半径,比仅依赖腿部转弯的方式减小约30%,并且较纯脊柱驱动转弯减小60%到85%。这些结果不仅凸显了脊柱弯曲在机器人运动效率中的关键作用,还为未来的机器人设计提供了宝贵的参考依据。
图 14 在脊柱和腿部共同作用下的转弯行为兼具转弯速度和灵活性
▍实验四:柔性脊柱弯曲提升机器人的整体运动能力
在最后一个实验中,研究团队在迷宫环境中进行了导航任务的测试。机器人在两种配置下进行了测试,即开启和关闭脊柱控制器。如图所示,迷宫场景要求机器人执行一系列的行走和转弯动作以穿越迷宫。为了确定NeRmo应该遵循的路径,研究人员采用了视觉传感器来获取视觉数据。实验结果表明,受益于脊柱对足式运动的提升作用,机器人完成迷宫的时间减少了30.6%。
图 15 在脊柱作用下,老鼠机器人可以更快地完成复杂的迷宫任务
▍备注:具有刚性脊柱的老鼠机器人
在这项研究中,为了进行无脊柱相关的对比实验,研究团队通过控制脊使位置,使其固定在中性位置。为了确保实验的公平性,研究团队还通过填充每个椎骨之间的缝隙,制造了一个具有刚性脊柱的老鼠机器人。配备柔顺脊柱的机器人重量为224.2克,而配备刚性脊柱的机器人重量为223.9克。实验结果表明,使用刚性脊柱的机器人获得的结果与固定在中性位置的柔顺脊柱机器人的结果非常接近。因此,研究团队可以确保所有实验的公平比较,并选择展示使用固定柔顺脊柱设置获得的结果,而非刚性脊柱。相关实验视频均可以在论文补充材料中观看。
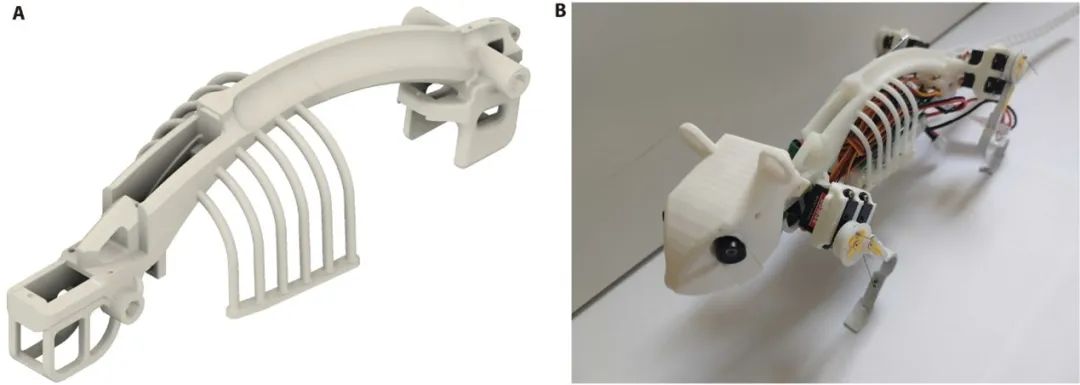
图 16 具有刚性脊柱的老鼠机器人
▍结论
在这项创新研究中,科研团队精心打造了仿生机器老鼠NeRmo,巧妙地模拟了老鼠四足行走时肌肉和骨骼的高效运作。其核心亮点在于一种既柔软又具有弹性的脊柱,这不仅能承担体重,还可以灵活伸展和弯曲,真实地再现了生物脊柱的功能。区别于常见的四足机器人,NeRmo拥有的脊柱设计既简洁又灵活,更显紧凑,为未来机器人脊柱设计提供了新的视角。在一系列实验中,研究人员展示了这种柔韧脊柱在提升小型欠驱动四足机器人运动性能上的显著优势,尤其是在提高静态稳定性、行走速度和转弯灵活性方面。特别值得一提的是,即使在三足接触的不稳定状态下,NeRmo也能保持平衡,充分证明了其在实际应用中的强大鲁棒性。此外,NeRmo利用其脊柱的侧向弯曲来延伸步幅,从而实现了更快的移动速度。在转弯性能方面,NeRmo相较于传统的基于腿部动作的转弯,其速度提高了高达40%,最小转弯半径也得到显著改进,展示了柔韧脊柱在提升四足机器人机动性方面的巨大潜力。
论文pdf下载链接:
https://www.science.org/doi/10.1126/scirobotics.adg7165
作者简介

邴振山博士目前担任德国慕尼黑工业大学的高级研究员。他的研究领域主要涵盖仿生机器人、类脑算法以及基于强化学习的机器人运动控制等方面。在国际知名期刊上已经发表了80余篇学术论文,其中包括《Science Robotics》、《IEEE Transactions on Pattern Analysis and Machine Intelligence》等权威期刊。作为项目联合负责人主持国家自然科学基金中德合作交流项目,德国巴伐利亚州未来信息科技创新项目。现担任IEEE Transactions on Neural Networks and Learning Systems , Frontiers in Neurorobotics, Cyborg and Bionic Systems等多个SCI期刊副编委等职务。

黄凯教授,中山大学计算机科学学院人工智能与无人系统研究所的所长。研究兴趣包括医疗手术机器人,仿生机器人,嵌入式系统的分析、设计和优化技术,特别是在汽车和机器人领域的应用。

Alois Knoll教授,计算机科学家,IEEE Fellow,慕尼黑工业大学计算信息与技术学院教授,任该学院机器人、人工智能和实时系统研究所所长。他在人机交互、神经机器人以及自动化系统领域做出了开创性贡献。
----------------END-------------------



