
最近,来自南京航空航天大学等高校的团队研发了一种新型的壁虎机器人中枢神经控制策略,该项研究以论文A neural coordination strategy for attachment and detachment of a climbing robot inspired by gecko locomotion为题发表于中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems 。

论文地址:https://spj.science.org/doi/10.34133/cbsystems.0008
▍什么是中枢神经控制策略?
生物实验研究表明,动物的节律运动是由中枢模式发生器(Central Pattern Generator,CPG)控制的,而中枢模式发生器是由许多单神经元组成的局部神经网络。中枢模式发生器的控制不但响应迅速,而且可在缺乏大脑控制的情况下自发地生成节律信号,控制生物生成节律运动。
当前,多层中枢模式发生器神经网络已经成为研究热点,逐渐应用于解决机器人运动控制问题,相关的控制方法被称为中枢神经控制策略。
新型中枢神经控制策略作为一种新颖的机器人移动控制方法,不但可以产生节律性运动信号,而且可以及时响应高级中枢反馈信号进行调节。这些特点能使其较好地满足动物在不同地形上移动的需求。
▍黏附式爬壁机器人
当前爬壁机器人主要有真空吸附式、磁吸附式、钩爪式、黏附式等。其中,基于范德华力的黏附式具有超疏水性、强黏附、易脱附性和复用性强等优点。因此,国内外许多研究团队对诸如壁虎等爬壁生物进行了广泛研究。壁虎可在多种壁面环境下灵活爬动,这得益于它们超强黏附力的脚掌和灵巧的四肢。

壁虎脚掌
壁虎作为黏附爬壁的能手,是设计爬壁机器人的重要灵感来源。为了对壁虎的运动进行表征和分析,研究人员在壁虎关节与脚掌贴上反光标记点,并用高速运动相机捕捉壁虎在运动时和亚克力板之间的接触状态。

壁虎在不同坡度的基板上的爬行动作分解示意图
结果表明,壁虎的脚趾和四肢并不是按顺序或同时运动的,恰恰相反,这些运动存在着特定的相位差,这种存在相位差的协同运动帮助壁虎实现快速黏-脱附,具体的运动过程如下图所示。
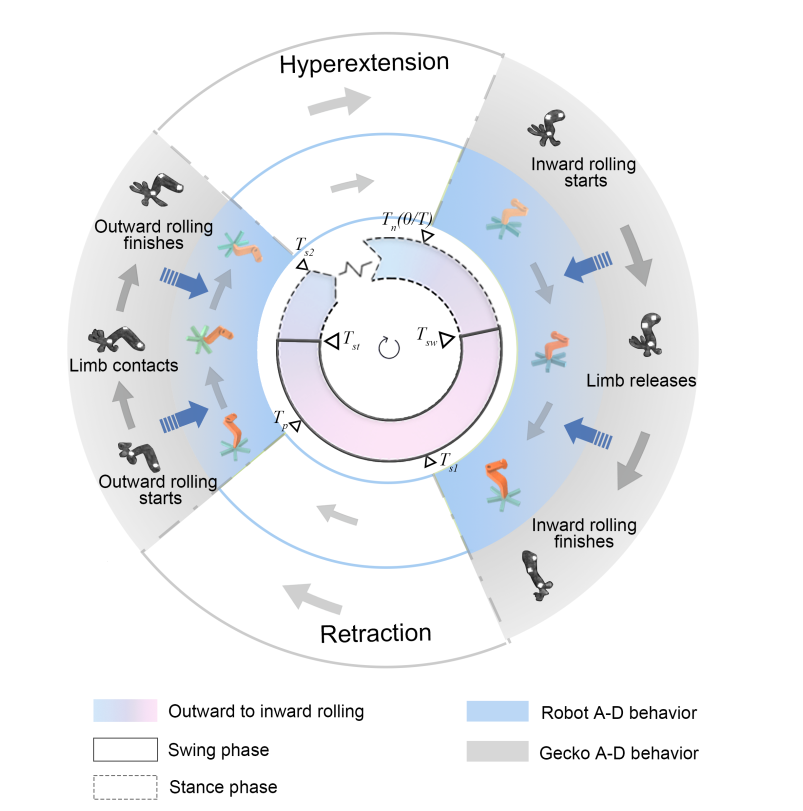
壁虎的黏附系统和运动系统之间的周期性协同时序
▍混合驱动助力壁虎机器人运动
通过运动分析,研究人员得到所需的关节角度范围与工作空间。研究人员设计壁虎机器人的整体结构,如下图所示,并总结出黏-脱附阶段对脚掌的不同功能需求,以此来设计仿生脚掌。
在该项研究中,研究人员提出了气动和电力混合驱动系统,混合驱动不仅能提供优异的大变形,而且能提高驱动器的刚度。
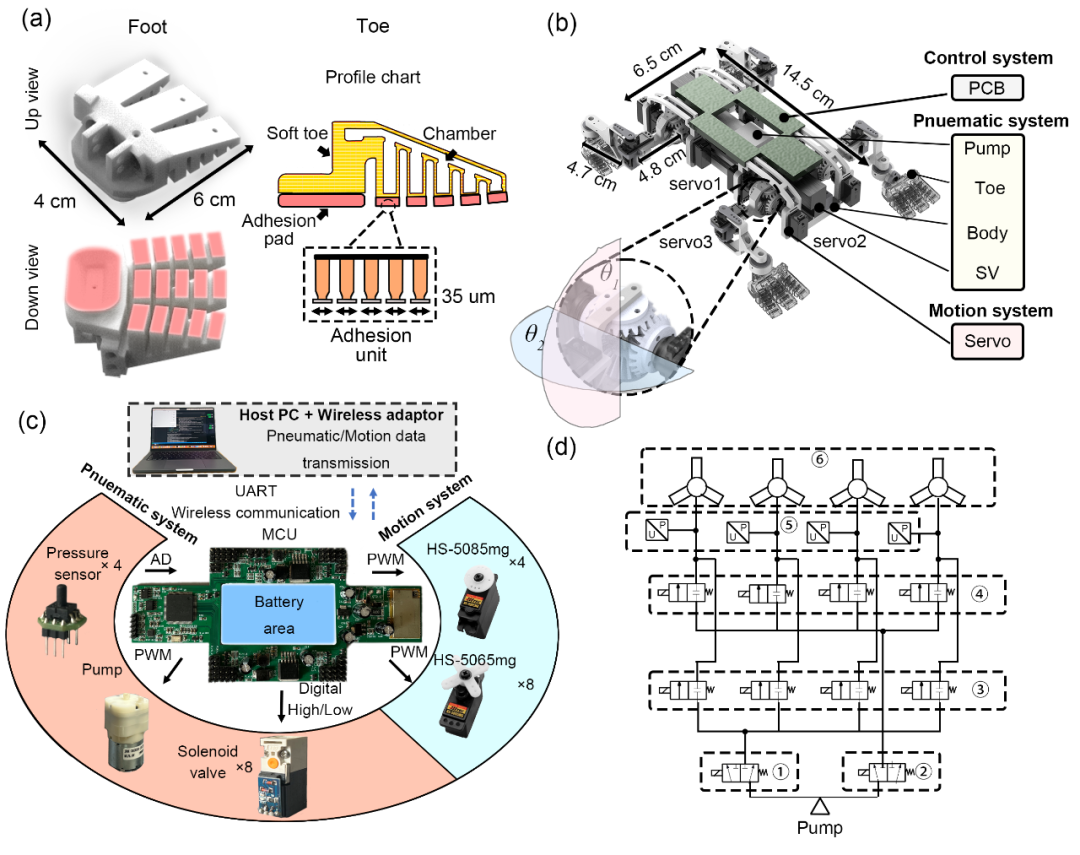
仿生壁虎机器人的结构及其电气连接示意图
这种混合驱动的特点在于:脚部使用软体气动驱动器作为黏附装置,用来实现快速的双向驱动能力和表面适应性。脚部附近装有气压传感器,可对气压进行反馈控制。使用伺服电机作为四肢驱动器,可最大程度提供运动自由度。
▍中枢模式发生器控制机器人运动
拥有多种驱动方式还不够,仿壁虎机器人需在完成可靠黏-脱附的同时保证四肢协同工作,其驱动单元的工作时序十分复杂。如何进行精准仿生控制?研究人员基于中枢模式发生器提出了带有刺激延迟功能的模块化神经控制策略,旨在解决协同工作时序的问题。
研究发现,通过测试机器人脚趾、肢体关节和运动部件之间的协同性能,并实现多驱动单元仿生爬坡机器人的协同运动控制,可以解决机器人肢体间运动的协同工作以及肢体和脚之间驱动滞后的补偿问题。研究中采用的模块化神经控制的神经协同控制策略框架如下图所示。

模块化神经控制的组件和与驱动器的输出对应示意图
通过之前对壁虎运动的详细研究,研究人员将各个运动控制模块设定了刺激抑制单元,以实现一定的相位差,最大程度模仿大自然中壁虎的黏附爬行运动。

神经网络控制策略信号时序图
▍混合驱动系统的协同工作
为了验证本设计中机器人的运动能力,研究人员进行了一系列实验,将具有模块化神经控制的机器人与不具备协调控制能力的机器人进行比较,实验示意图如下图所示。

实验测试平台示意图
实验的统计结果如下图所示。这一系列结果表明,与传统的不协同攀爬行为相比,协同攀爬行为可以有效改善攀爬过程中的黏附接触状态。使用神经协同控制策略的机器人在平面和弧上的速度均为0.4 cm/s。而气爪和关节运动无协调行为的机器人弧面平均速度为0.32cm/s,平面平均速度为0.16 cm/s,这证实了采用协同控制策略的机器人的运动速度得到了显著提高。

使用协同控制和不使用协同控制的机器人脚黏附力对比结果
研究人员发现不使用协同控制策略的机器人会由于运动不稳定而打滑,而采用了协同控制策略的机器人黏附状态相对较佳。使用协同控制策略的机器人在45°平面上的最大载荷为200 g,而未使用的机器人最大载荷仅为50 g。总体而言,通过使用协同控制策略成功实现了机器人对腿足的协同控制操作(包括附着和分离)。

综合机器人测试下的位移和姿态变化结果
▍展望
虽然多层CPG神经网络可以对机器人的运动实现一定控制,但现实中机器人的工作环境是复杂多变的,如阶梯、坑洼地形等,这需要对机器人进行多传感器融合,如视觉反馈以及机器人腿足的接触状态反馈,以有效提高机器人对环境的适应性,从而提高机器人运动的鲁棒性。



