
移动机器人还能用在哪些场景?高尔夫球场或许是许多人没有想到的结果。
近日,一款名为Axglo X-E的高尔夫球机器人在网上引发热议,这款移动机器人喜欢与不喜欢的人或许同样之多。

这款机器人的原型最早2020年9月15日发表在《Electronics》上,题为“An Autonomous Human Following Caddie Robot with High-Level Driving Functions”,讲述了一种将机器人技术和人与机交互技术融合起来的全新可能性。
这款机器人的灵感来源也非常简单,由于当前越来越多的体育赛事中出现机器人的身影,移动机器人作为运动场机器人也是一种新兴的应用,它们可以帮助服务选手甚至是进行比赛,从而作者想尝试设计一种能够用于体育场景中的机器人。
虽然目前该款产品的实际销量情况不得而知,但从一些具体的产品设计和应用来看,非常具有参考价值。
▍鸭子一样的机器人
作为一个细分品类的机器人,这款产品在功能上非常聚焦,并延伸出很多特性。
从外观来看,这款高尔夫机器人Axglo X-E像是一个鸭子,它其实也是一款移动机器人,其核心卖点在于跟随模式,同时还具有较为不错的智能化和通过性。
Axglo X-E所面向的场景非常固定且实用,就是满足那些喜欢高尔夫球但又不喜欢别人带着自己宝贵的设备到处走的人群。
因此,在功能上,这个高尔夫球机器人着重强调了一个全智能跟踪系统,它可以自主地跟随高尔夫球手,并提供有用的信息,如高尔夫球场导航系统和天气更新。

借助激光雷达传感器,Axglo X-E当发现障碍物时,能紧急制动停止小车来防止事故发生,在无法驾驶的区域还会通过报警系统(掩体、危险等)警告用户。同时能够判断并准确导航翻越一定地形,与人保持着的距离。
Axglo X-E的高尔夫机器人还可以折叠起来,方便用户购买使用后放在汽车后备箱里,凭借强大的设计能力,Axglo X多个传输结构可以协同快速折叠,自动缩小尺寸,以更方便运输。但为了保证户外的续航能力,这款高尔夫球机器人却还配备了80000毫安时的电池,能够支持25公里的移动续航。
得益于高水平的产品设计,Axglo X-E很好地在功能和空间上做到了一个平衡,使得功能按键和多功能控制台能够更好得到保护,同时方便了用户携带,其折叠后的尺寸比现有市场上其他折叠式电动高尔夫车要小。
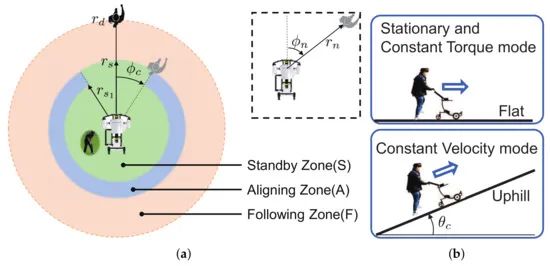
这种新型高尔夫球机器人还具备的一些独特功能,例如机器人的运动有3种模式:自主跟随模式和手动驾驶模式,还有折叠模式。Axglo X-E的每种模式之间可以自由切换。
这是由于考虑到户外场景的特殊性,即高尔夫球场是一个非结构化环境。
如何保证机器人在跟随模式下实现用户体验感,不仅需要解决用户能够即时拿取装备的问题,还需要考虑最好能提供比赛所需的有用信息,如场内球员人数、场内地面地图、天气情况、紧急警报和餐厅信息等。
为此Axglo X-E反传统式设计,球杆袋口向人,以方便拿杆,还加入了一个能够即时通信的平板面板,实现了更高的智能化。在跟随人类时,机器人能够整个携带高尔夫球包,方便了用户使用。

而在上坡时候,人可能更需要借助机器人辅助拖运,这就决定了Axglo机器人有时候需要有时候能够爬上超过45度的斜坡,这就有了两个辅助轮的设计,但又要兼顾机器人要在不使用辅助轮的情况下,如何能实现较好的自主爬坡问题,更好实现了载物移动。当高尔夫机器人快要没电的时候,还可以采取手动拖拉模式,帮助机器人快速返航。
▍深层次的技术与应用
目前,移动通过性已经成为机器人技术中的重要组成部分,除了传统的工业应用导向功能外,机器人+领域正因此快速拓宽。
例如在体育领域,机器人的功能已经不仅仅限于打乒乓球,还有了棒球、踢足球、台球甚至参与进冰壶比赛中的投掷石子等体育活动,这在技术上也使得机器人技术出现了一种新的方向,即与人类间接互动的机器人。
高尔夫作为另一项流行的体育运动,正得到越来越多人的喜欢,也逐渐从贵族运动走向平民化。除了Axglo机器人这种辅助人类载运的移动机器人,还已经有各种机器人被开发并应用于训练课,例如一种名为'RoboCup and Caddy Cord'的新型机器人,主要被放置在球洞中,可以搜索、拾取高尔夫球,并将其送回选手手中。
在高尔夫球的运动中,或者说相当大一部分非结构化的场地中,机器人运动和工作最困难的部分之一是解决地形和移动的问题,例如需要考虑草的高度及其粗糙度、风量和湿度,最糟糕的是地形,因为高尔夫球场不像办公室地板上的练习垫那样平坦,经常面积巨大且有小山丘和山谷,对机器人的移动速度造成严重影响。
因此从技术上来说,机器人需要考虑到高速、精密、鲁棒性等特点,帮助其适应重复性复杂任务。
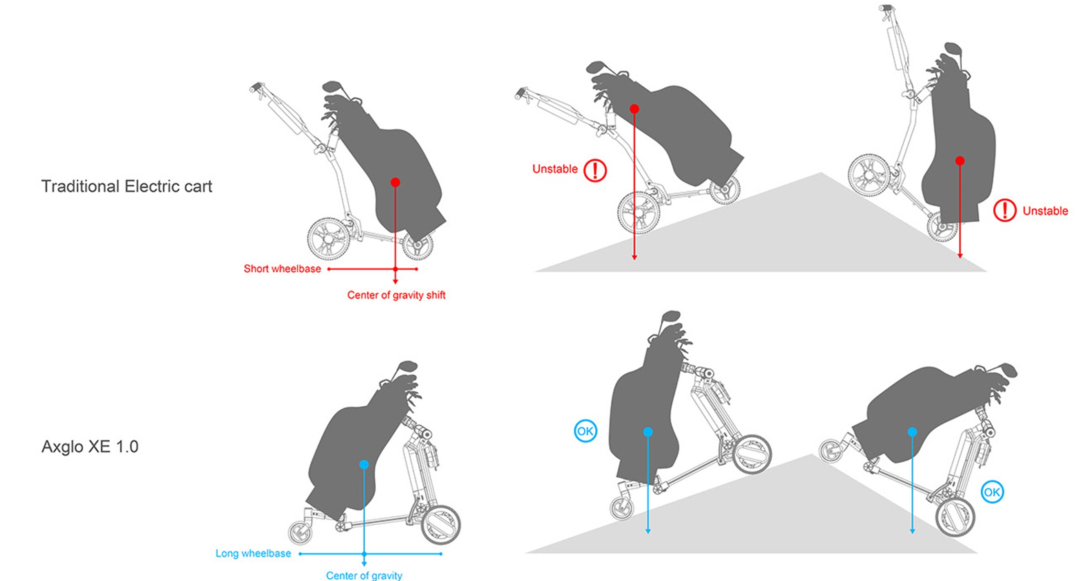
例如Axglo之所以能够轻松越过45度的斜坡。是因为为了在场上高效移动,球童机器人由四轮移动平台组成,前轮为两个主动轮,用于驱动,后轮为被动轮。在前底盘中间附加一个小的被动轮,以防止球童在下陡坡时翻转。由于高尔夫球场有弧形路面等不平坦的地形,为了减弱滚动运动,安装了带有倾斜接头的倾斜机构,同时可以通过使前后轴距的长度最大化,解决了失去平衡的问题。
而之所以能够跟随人并判断轨迹,主要是基于射频(RF)信号的远程控制器来测量机器人和选手之间的距离,这种借助视觉系统和传感器系统直接实现了机器人与人之间的合理距离。为了实现合理的避障和路径规划,其主控制器采用STM32F407VG(意法半导体公司生产)作为主处理器,配合其他板载传感器,即IMU(惯性测量单元)、陀螺仪和加速度传感器来合理规划机器人的运动。

当然,在技术上还有一种高精度的局部定位系统(LPS),这是基于先进的控制算法以及轨迹生成器而实现机器人路径生成,避免机器人进入一些难以控制的地形,其技术形式是通过视觉和辅助中继设备,来观测到球员动作的变化,分析球员在击球高尔夫球撞击点的最佳挥杆速度和姿势,同时判断高尔夫球在草地上的最佳位置,然后让机器人能够生成出合理点进行运动。
为了实现这样一个系统,研究人员构建了一个模型,利用已经安装在高尔夫球场中的中继器系统来发射和接收信号,该模型输入了球速和重量等因素,以及球对地形变化(如山丘)的反应,该模型还考虑了风的影响。

由于机器人上方放置了一台 3D 相机并在击球时拍摄一张快照,捕捉了它所有波浪形的细微差别,然后将该快照发送到物理模型,该模型进行了数千次模拟,判断出最后的落点和移动轨迹。其通过实验表明,这种所基于距离和航向角提出的各种运行驱动模式策略在高尔夫球场确实有效且能够实际应用。
此外,研究人员还在此基础上开发了一种遥控后装插件,可以让人类通过手柄接口接管自动驾驶进入手动控制,还考虑未来加入语音识别等更加智能化的操作方式和指令。
▍结语与未来
在机器人产品的设计过程中,必然需要考虑用户场景,既要保证功能性也要强调舒适性,为了应对这些场景,大多数企业在产品设计的过程中,大多需要重新定义机器人的操作模式,并对其进行了分类,以根据不同情况设计才能更加有效地实现机器人与人类的协同和同步。
为了在这些模式之间合理切换实现更优秀的人机交互,更是需要通过模型定义反映环境条件、人类意图和操作条件的切换参数,这样才能减少外部环境干扰,判断主人的意图,这种识别算法也是未来户外场景中重要的一环。
目前,机器人的应用场景还有很多,许多方向也具备研究价值,例如自动障碍物检测、防碰撞、制动系统等,围绕如何提高机器人操作的安全性,智能性,许多新的方向都大有可为,高尔夫球机器人或许并不是终点,而只是一个新起点。



