
机器人也有指纹了?

放心,它不会来偷你的身份信息,而是有更大的用处——触觉感知!

这是来自东华大学的最新研究——一片薄薄的离子皮肤,厚度仅有2毫米,表面有一圈一圈的“指纹”,看上去弹性十足。
它能够实现类似于人类指尖皮肤的触觉感知,识别物体形状这种已经不算什么了,它甚至能摸出物体表面不同的纹理和材质、还能检测大气变化!
▍解决离子皮肤的瓶颈难题
可拉伸离子皮肤是一种超软的触觉传感器,能够帮助机器人实现类似于人类的触觉感知,然而它在高级触觉传感应用中仍存在两方面的局限性:

一是当离子皮肤被拉伸时,压力传感性能会发生不必要的改变,这大大增加了不同应变下压力定量测量的复杂性;
二是大部分离子皮肤缺乏精细纹理识别能力,从而无法准确获取物体表面信息。
怎样才让离子皮肤既能不受拉伸变形的影响,又能提高它精细纹理感知的能力,是目前的发展的瓶颈难题之一。
在一筹莫展之际,东华大学的研究人员发现,人类的指纹皮肤结构刚好可以解决以上问题。
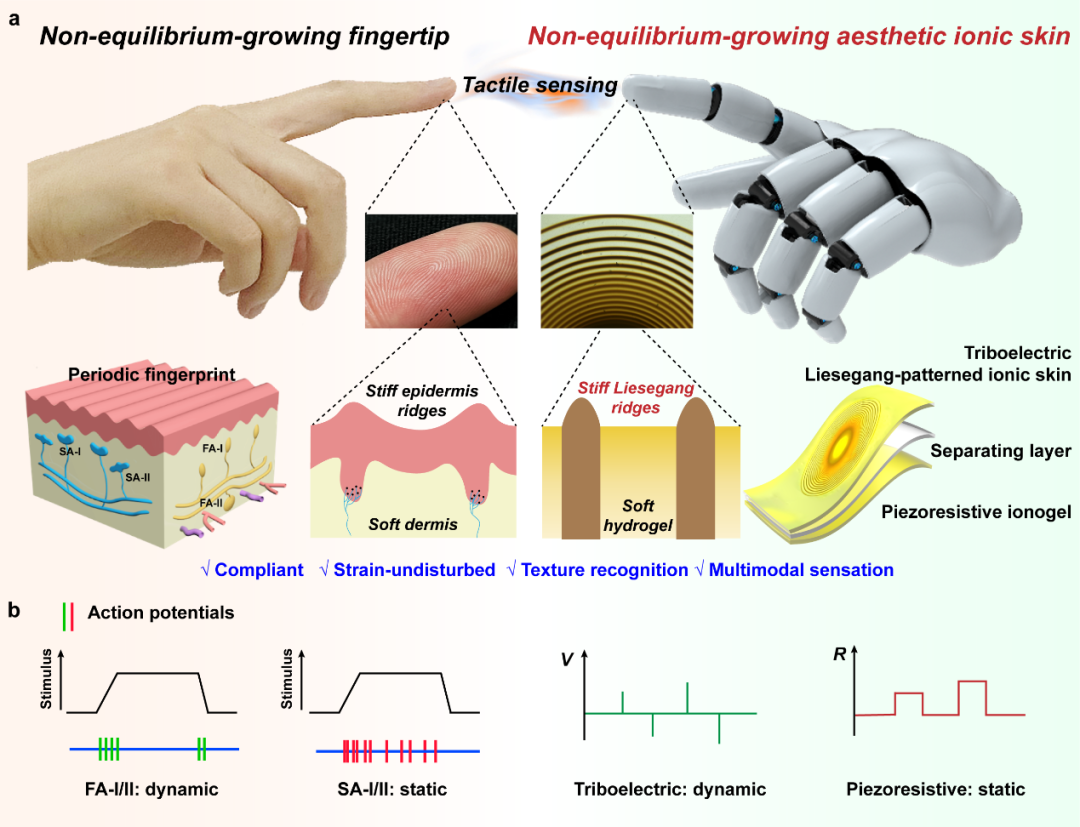
指纹皮肤是皮肤中最敏感的区域,具有周期性的凹凸结构,“指纹”的凸起部分在拉伸时不会发生明显变形,在受到外力刺激时,还能作为“机械放大杠杆”,通过表面摩擦放大振动触觉信号,实现对接触物体纹理的精细辨别。
▍该如何设计一种具有“指纹”功能的离子皮肤呢?
如果只是简单的通过模板法或图案化在离子皮肤表面“印”上指纹,在受压或拉伸时很容易被碾平,会使信号传递受限、纹理识别能力大大减弱!
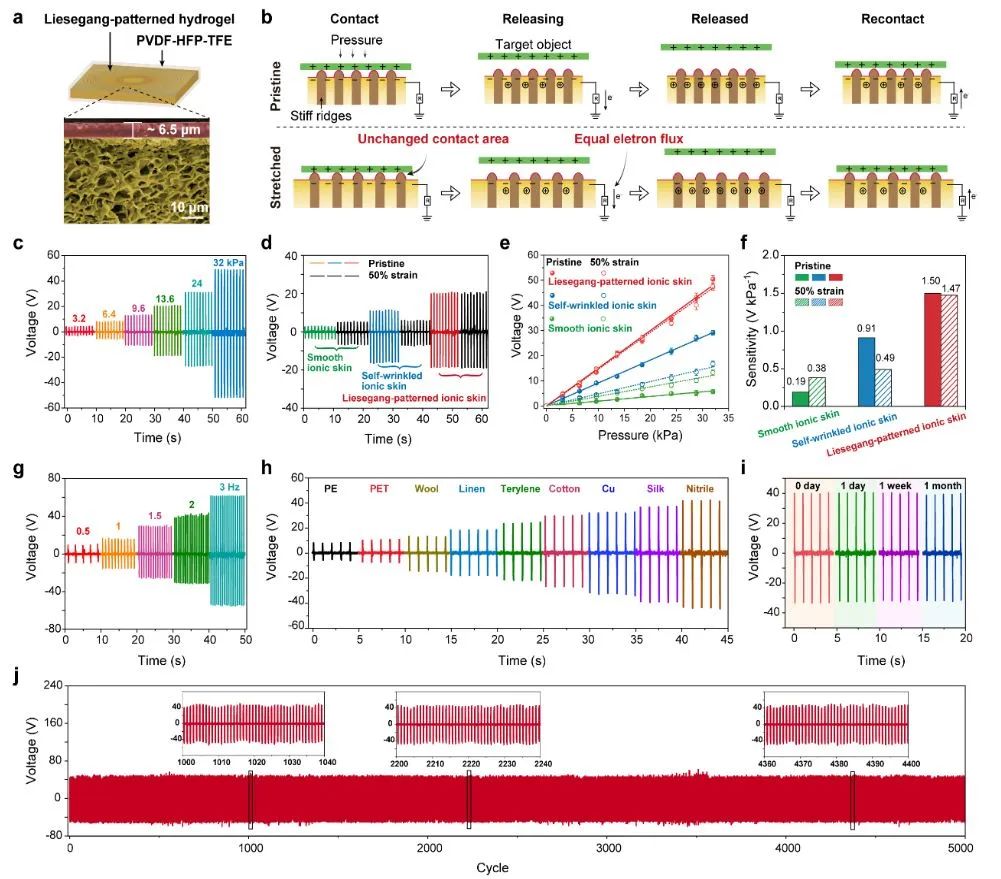
为了解决这个问题,研究人员通过反应扩散的方式在水凝胶基质中形成了经典的 “Liesegang图案”,这是一种具有周期性沉淀带纹样的现象。
在多孔凝胶介质中,试剂的扩散速率受到介质孔隙结构和尺寸的限制。当试剂开始扩散并与另一种反应物相遇时,会发生沉淀反应并形成沉淀带。由于扩散速率的不同,沉淀物的形成会呈现出周期性的特征,间隔距离和宽度呈现规律性的变化,看起来和我们的指纹差不多。
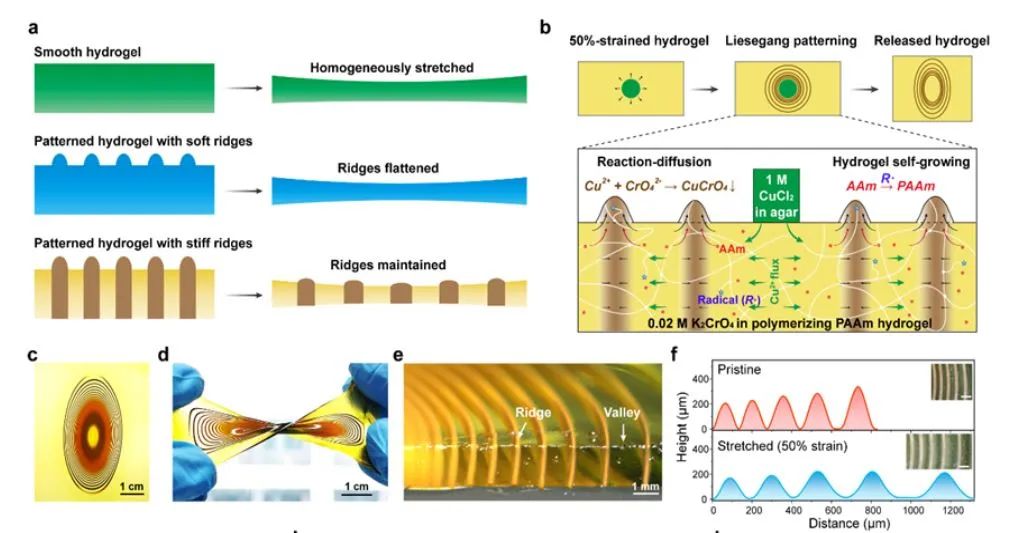
在初步形成“指纹”图案后,研究人员在上面包裹了一层氟橡胶,这样即便用酸洗去除图案,表面的凹凸结构依然能保持下来。
研究人员对“指纹皮肤”进行了微力学压痕测试,即便拉伸到50%变形后,它的压力灵敏度几乎没有变化!此外,它还对压力频率、接触物材质有灵敏响应,能够区分出不同粗糙度的标准砂纸!

同时,由于氟橡胶的保水性,避免了水凝胶的长时间脱水问题,作为触觉传感器具有长时间的电压输出稳定性。
接下来,研究人员将“指纹皮肤”贴在了机械抓手上,让它抓取橘子、柠檬、香蕉等不同的水果,根据在这些水果表面的光滑程度及纹理,“指纹皮肤”将它们全部成功分类!
▍开发团队介绍
这项研究以“Non-equilibrium-Growing Aesthetic Ionic Skin for Fingertip-Like Strain-Undisturbed Tactile Sensation and Texture Recognition”为题,发表在了Advanced Materials期刊上,得到了国家自然科学基金重大项目、国际(地区)合作与交流项目、面上项目等的资助与支持。

东华大学化学与化工学院博士研究生乔海燕为文章第一作者,孙胜童研究员和武培怡教授为论文共同通讯作者。
武培怡教授课题组致力于将先进光谱表征手段与功能高分子设计相结合,开发系列具有智能、功能及仿生特性的聚合物材料,并进一步应用于皮肤仿生、智能传感、响应致动、能源存储、污水处理等领域。

这种精细的识别能力在以前的人造皮肤中很少能实现,而且研究团队还在继续优化。孙胜童研究员表示:“皮肤是在水凝胶基底上制造的,所得材料的厚度约为 2 毫米,这可能不够薄,无法满足未来的软体机器人应用。在我们接下来的研究中,我们将尝试将Liesegang 图案引入超薄基质中,以制备更薄的人工离子皮肤。”



