
What?漫威出新的机器狗角色了?!
No No No,是这只机器狗的名字叫漫威(Marvel ),虽然没上大荧幕,但它登上了最新一期《Science Robotics》封面!
眼瞅着快到2023年了,机器狗这次还能玩出什么新花样来?一起看看:
模仿一个蜘蛛侠,看我徒手攀岩(上墙):
克服地心引力,直接在天花板上倒立行走:
在墙上遇到障碍物可以自动躲避:
有一说一,“漫威”这个名字起的确实符合狗设,这矫健的身姿就是机器狗界的蜘蛛侠吧!
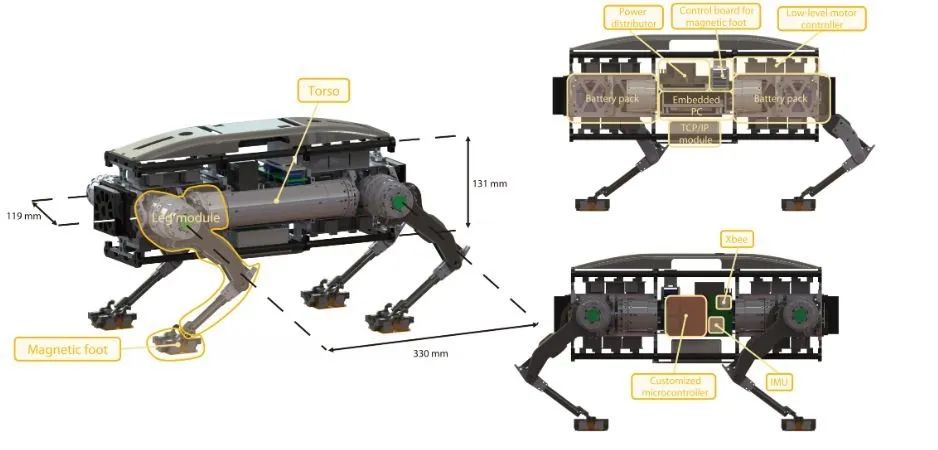
言归正传,这只机器狗总体来说可以攀登和穿越金属墙和天花板,跨过10厘米宽的缝隙,清除5厘米高的障碍物,攀爬速度最高可达0.7米/秒(2.12 倍体长)!

除此之外,它还能携带3公斤左右的重物,可以协助人类在大型金属结构(如油罐、桥梁和水塔)上进行危险的维护工作。
这究竟是如何做到的?
▍成为机器狗界蜘蛛侠的两个关键
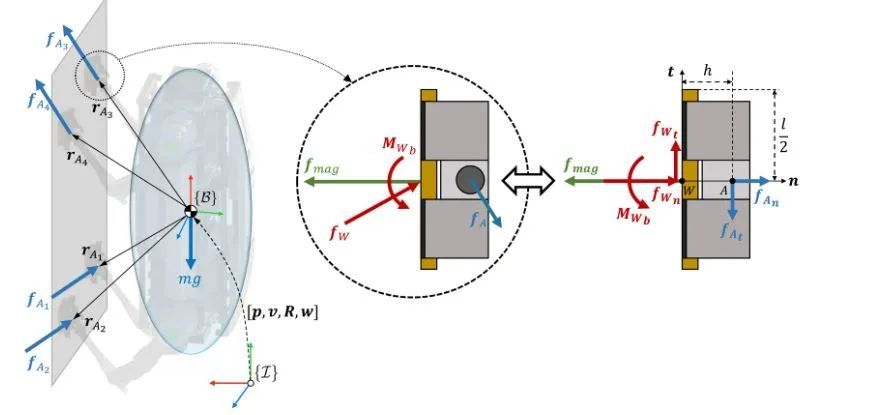
关键之一在于“磁脚”。
漫威的脚使用了「电永磁(EPM)」和「磁流变弹性体(MRE)」的组合。
先分别说一下,「电永磁」是一种可以由电力控制生磁和消磁的磁铁;「磁流变弹性体」是一种含微磁颗粒的弹性体材料,施加磁场时其物理或机械性能会改变。
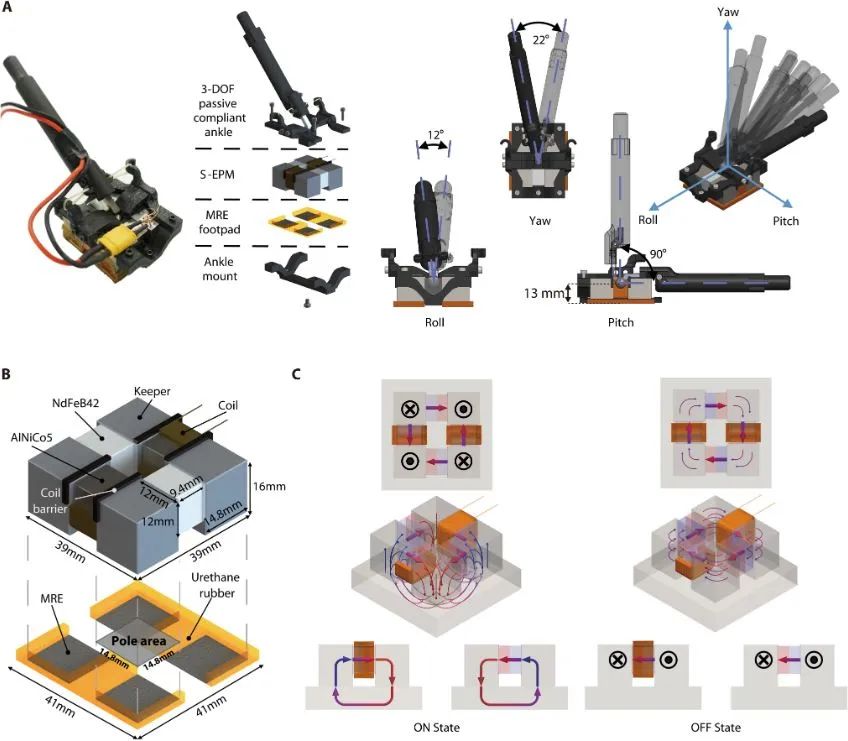
因此,「电永磁」的作用根据需要对机器狗的脚进行磁化和消磁,使其能够停留在一个表面上,然后在它迈出一步时释放;
而「磁流变弹性体」作为机器狗的防滑脚垫,可以提供更大的切向摩擦力,有利于动态垂直爬行。
再加上特殊的踝关节反作用力设计,可以很好的防止机器狗脚滑或摔倒。
关键之二在于“运动控制”。
机器狗的控制器由三个子模块组成:一个用于提供机器人行为的运动计划;一个用于跟踪身体的站立运动控制;还有一个用于磁脚的摆动和磁性分离。
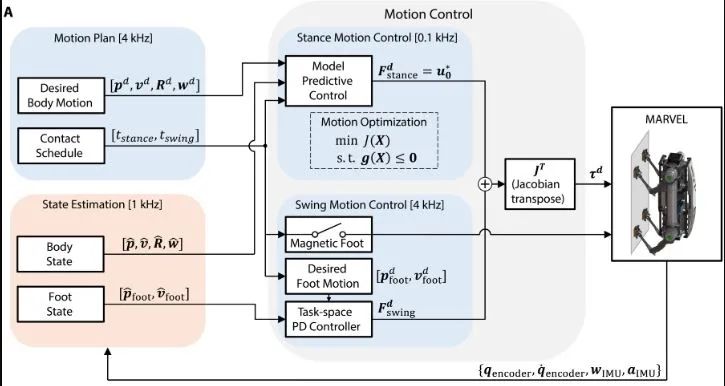
每个控制器都需要一组控制命令以实现机器狗的所需行为,这些命令可以由运动库或人为提供。运动库包含许多随时间变化的预定义所需运动,它可以通过高级运动规划算法(基于采样的优化和轨迹优化)生成。
同时,每个子模块都使用了相同的控制策略——非线性模型预测控制 (NMPC) 策略,这种策略可以利用简化的动力学,预测机器人的未来行为。
这样一来,机器狗还可以爬上表面带弧度的油漆罐,在遇到障碍物时,可以通过运动库中的运动命令来控制,成功避开障碍物。

除此之外,机器狗还模仿猫在跳墙面之前测试表面的方式,在爬上墙之前,先用前腿测试是否稳定,然后再逐渐蹬上后腿。
▍谁创造了这样的机器狗
韩国科学技术研究院(KAIST)动态机器人控制与设计(DRCD)实验室的研究人员Seungwoo Hong、Yong Um、Hae-Won Park与Jaejun Park 合作创造了漫威机器狗,并将论文发表在《Science Robotics》期刊上。
Hae-Won Park教授是该团队的带头人,本科与硕士毕业于首尔延世大学,博士毕业于密歇根大学安娜堡分校。

论文第一作者Seungwoo Hong本科毕业于上海交通大学,目前在韩国科学技术研究院就读博士学位。

作者表示,未来还可以改进机器狗的执行器方案和控制器,以获得更好的运动性能。
论文转送门:DOI: 10.1126/scirobotics.add1017



