
Dojo是特斯拉正在开发的超级计算机,目前用于人工智能机器学习和计算机视觉训练。特斯拉已从今年7月开始生产Dojo超级计算机,朝着更快、更便宜的神经网络训练迈出了重要一步。公司计划明年再Dojo上投入超过10亿美元;未来,特斯拉计划同时使用英伟达和Dojo的算力。
但目前对于特斯拉而言,Optimus的产能提升还面临着多项挑战——而产能受限的原因主要是缺乏现成的执行器,Optimus连执行器都需要定制,目前没有供应商生产Optimus需要的执行器。
执行器是机器人最核心、通用的部件,决定着机器人的负荷和精度,具备价值量占比高、复用性强两大特点,中信证券甚至将其比作“新能源车中的动力电池”。
执行器由多种零部件组成,按照功能原理与价值量,执行器由传动装置、驱动装置、感知装置、控制装置等“四大主材”以及制动器与轴承等“辅材”组成。
另外,国泰君预计,人形机器人对执行器的需求弹性排序为:行星滚柱丝杠>谐波减速器>行星滚珠丝杠>滑动丝杠>轴承。
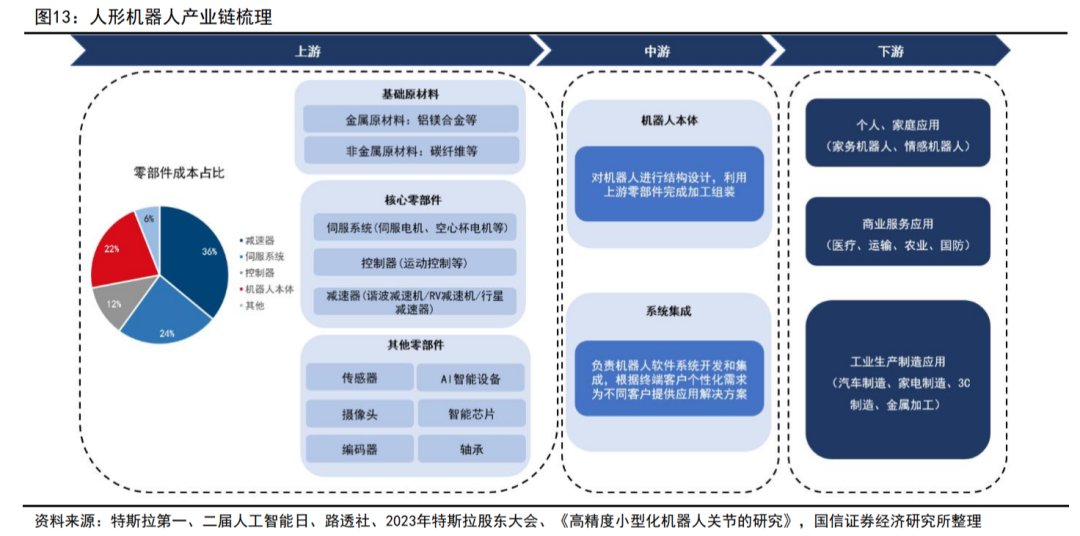
人形机器人产业链梳理
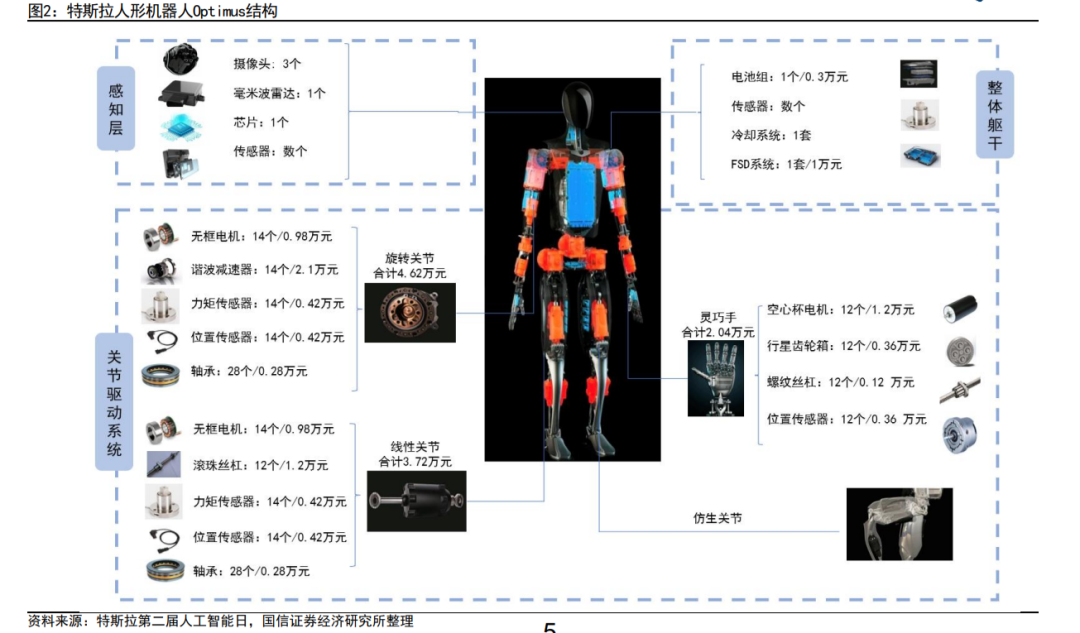
一张图梳理人形机器人零部件价值量和主要构成
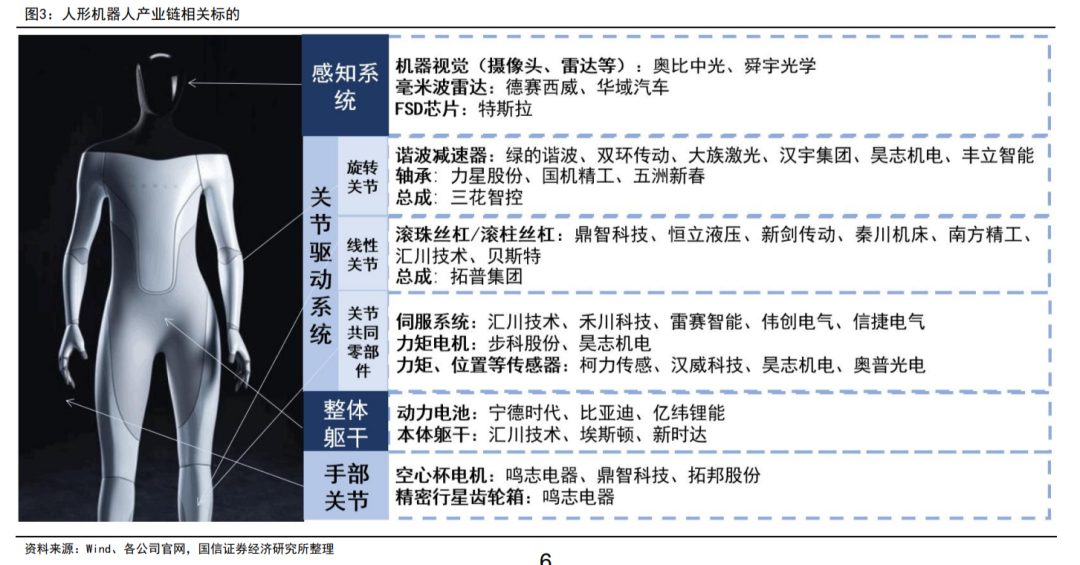
一张图梳理人形机器人产业链相关标的(Optimus为例)
人形机器人产业链深度梳理
人形机器人“奇点”时刻
特斯拉快速迭代引领,AI赋能有望极大加速商业化落地进程
人形机器人商业化爆发的前提:核心要解决通用性和成本的问题,而通用性的实现对技术提出了极高的要求,技术上要实现“类人功能”,软件方面需提供“大脑”的思考能力和“小脑”的运控协调能力,硬件方面需提供可实现相应动作的载体,难点在于如何做到更聪明、更效率、更灵活,可贴切满足人类需求进而实现商业化落地,当前基础要素已备且在迎来加速的拐点。
特斯拉入局,加速软硬件迭代:过去100年以来国内外多家企业已推出可实现基础动作和交互的人形机器人,而特斯拉从2021年8月公布人形机器人项目到2022年9月展示原型机,再到2023年5月发布Optimus(具备自然行走、电机扭矩控制、力度控制、环境识别及记忆等功能),展现了极快的产品迭代能力,使得人形机器人关键技术迭代突破和降本有了更快的可能。
AI赋能有望进一步加速:以ChatGPT为代表的大模型正在引领新一轮人工智能浪潮,其爆发使得人形机器人拥有思考能力成为可能且极大加速“大脑”和“小脑”能力的发展。
潜在兆亿赛道,国家支持政策频出:人形机器人是有望超过新能源汽车/智能手机市场规模的兆亿级赛道,有极大解放生产力和改善人类生活的应用潜力,正在持续得到国家政策更多的支持,2023年以来山东省、深圳市、上海市、北京市多地发布针对机器人的支持政策,特别是北京市政策系首个从全产业链全方位支持人形机器人加快发展的政策文件,这将进一步推动行业发展。
人形机器人受益环节:
把握价值量大、卡位好硬件端中国制造企业的长期机遇
人形机器人产业链与传统产业有一定重合,中国制造企业硬件端具备优势:参考新能源汽车/智能手机的发展,整装企业软件端倾向于自研自控,硬件端考虑性价比通常外购,中国企业凭借显著成本优势和在工业机器人/汽车产业的技术积累,有望占据先机充分受益。
人形机器人自由度达40个,硬件端难点在于关节:根据特斯拉数据,我们预计70%以上的硬件成本来自关节(旋转/线性/手部关节),主要零部件包括无框/空心杯电机、谐波/行星减速器、滚珠/滚柱丝杠、力矩/位置传感器、轴承等。
投资建议:
重点关注自身基本面较好且卡位好的优质零部件公司,维持“超配”评级
当前人形机器人仍处于从0到1的阶段,短期商业化进程有望加速,长期方向确定、空间广阔,综合考虑价值占比、市场卡位及确定性,建议重点关注:
1、减速器环节:重点推荐绿的谐波、双环传动(汽车组联合覆盖),关注中大力德。
2、微电机环节:重点推荐鸣志电器(电新组联合覆盖),关注江苏雷利(电新组联合覆盖,鼎智科技母公司)、步科股份。
3、丝杠环节:重点关注恒立液压、秦川机床。
4、伺服环节:重点推荐汇川技术,关注雷赛智能、禾川科技。
6、旋转/线性关节:重点推荐三花智控(汽车组联合覆盖)、拓普集团(汽车组联合覆盖)等。
人形机器人产业链深度梳理
视觉与力控
感器是机器人重要组成部分,价值量或仅次于关节模组。根据YOLE数据,2015-2021年无人机及机器人传感器市场从3.51亿美元增长至7.09亿美元,复合增长率高达12.4%,其中光学传感器占比达74%。传感器市场高增长率表明机器人对于传感器有强烈需求。机器人传感器可以分为内部传感器和外部传感器,其中内部传感器主要用于测量机器人自身状态,以实现独立行走、动态平衡、一般肢体动作等;外部传感器模仿人类感官,包括视觉、触觉、听觉、嗅觉、味觉、接近觉等传感器。通常来说,关节模组是人形机器人价值量占比最高的环节,占比一般在40%以上,我们通过梳理人形机器人传感器的可能应用位置与数量,推测人形机器人传感器价值量占比或仅次于关节模组。
视觉:机器人视觉的要点在于移动场景、精细描绘和高集成度。机器人自主导航与汽车自动驾驶技术系出同源,其中机器人视觉受限于内部空间,需具有更高集成度。机器人自主导航与汽车自动驾驶共同的三大关键技术为环境感知、规划决策与执行控制,自动驾驶和机器人主要通过传感器来获取周围环境信息。常用的视觉和环境感知传感器为摄像头、雷达(毫米波、激光、超声波等)、红外传感器、GPS、IMU等。马斯克在股东日表示,特斯拉已经打通了FSD和机器人的底层模块,实现了一定程度的算法复用。FSD算法利用传感器数据进行环境感知,这些传感器也可以帮助机器人感知周围环境,识别物体、人和障碍物等。
力控:多维力矩/力传感是目前最优解,电子皮肤或为触觉终极方案。目前机器人力控方案大致有3类,分别为电流环力控、多维力矩/力传感器力控、被动力控(弹性体),其中多维力矩/力传感器力控是当前力控的最佳方案,其硬件包括关节部位的单轴力矩传感器和机器人执行器末端的6轴力传感器。同时,机器人若要模拟人体的触觉,以及实现人体皮肤对温度、湿度等外界物理量的感知,则电子皮肤可能是最佳路径之一。电子皮肤需要集成各类传感器和集成电路,并使用柔性的材料制作,壁垒较高,目前尚未在机器人领域大量应用。但从泛用性与仿生性角度,我们认为电子皮肤或是机器人触觉的终极方案。
传感器“加码”智能机器人,建议关注具备机器人应用潜力的国产标的。
1、柯力传感:国内传感器领军企业,加速迈向物联网综合供应商。
2、汉威科技:子公司能斯达开发的柔性微纳传感器已在智能机器人领域得到应用,该技术与电子皮肤兼容。
3、奥比中光:3D视觉平台型公司,有望充分受益于机器人视觉应用场景落地。
柔性传感器
柔性传感器开启智能传感新时代,潜在市场空间有望超500亿。柔性传感器是指采用柔性材料制成的传感器,具有良好的柔韧性、延展性,可以自由弯曲甚至折叠。柔性传感器采用了柔性基板,其本质上是一种薄膜,通常采用聚酰亚胺(PI)、聚酯(PET)、聚二甲基硅氧烷(PDMS)等材料制成。从刚性到柔性的突破,极大拓展了传感器的应用场景,不仅是游戏领域中的智能穿戴设备,还有医疗大健康领域的电子皮肤、疾病诊断设备、健康监测设备、智能颈枕、智能按摩设备,消费领域的智能手环、元宇宙手套,智能家居领域的智能床垫,甚至是马斯克提出的脑机接口。根据汉威科技微信公众号的数据,2021年至2028年全球柔性传感器市场的年复合增长率达6.8%,预计2028年可达84.7亿美元。
电子皮肤开启人机交互新模式,机器人和脑机接口是两大超级应用。
脑机接口是柔性传感器的一大应用领域。柔性脑机接口的代表企业为Neuralink,2022年11月,Neuralink已经向FDA提交了大部分文件,审核通过后约六个月内,将在人类身上植入第一个Neuralink植入物。至此,柔性脑机接口终于与大部队汇合,三种技术路线的侵入式脑机接口均已介入人体临床。脑机接口行业有望迎来产业化落地,也表明柔性传感器在细分应用场景下的进一步成熟。机器人领域,电子皮肤的基本特征,是将各种电子元器件集成在柔性基板之上从而形成皮肤状的电路板,像皮肤一样具有很高的柔韧性和弹性,其能赋予机器人类似人类皮肤的敏感性,以及触觉、视觉、听觉、味觉和嗅觉等感知能力。电子皮肤可以广泛应用于手术机器人领域,医生佩戴电子皮肤可使手术机器人获取实时信息让手术更精准,而特斯拉推出人形机器人后,电子皮肤在机器人领域的产业化进度有望进一步被加快。
柔性传感器国内外企业齐发力,学术研究为高阶性能蓄力。目前,电子皮肤的研究已经取得一些进展,奥地利格拉茨技术大学最新研究的智能皮肤每平方毫米有2000个单独的传感器,但当前电子皮肤仍存在兼顾高柔性和高弹性难题、扩展性难题和制造成本高等痛点。从国内外知名研究团队和公司看,Interlink是全球领先的人机界面解决方案提供商,其持续在力觉传感器上持续深耕,公司产品已被用于无数行业,包括汽车、机器人、医疗和消费电子产品等;国内企业中,汉威科技子公司能斯达在柔性压电传感器领域掌握自主知识产权,实现国产化完全替代,相关产品已在三甲医院进行临床实验,柔性微纳传感器目前已在智能机器人领域有明确的应用;科研团队当中,国内外主要的科研团队如美国加州大学、新加坡国立大学、美国斯坦福大学和中国科学院等对于柔性传感器、电子皮肤的研究进展皆处于迈向更高阶性能的阶段。未来,随着技术的持续进步,电子皮肤产业化进程有望加快落地。
柔性传感器打开想象空间,建议关注具备机器人应用潜力的国产标的:汉威科技,子公司能斯达开发的柔性微纳传感器已在智能机器人领域得到应用,该技术与电子皮肤兼容。
智能关节的控制与驱动
伺服系统:驱动器和电机是主要成本,控制芯片是核心。伺服系统主要任务是按控制命令的要求,对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。伺服系统的基本组成部分包括电机、编码器、驱动器、控制器等,从成本构成上看,驱动器成本占整个伺服系统成本的42%,电机的成本占比约35%,编码器成本占比约为11%。而对于驱动器来说,主要结构包括控制芯片、电源模块、信号采集模块、功率放大器、过热保护电路和控制面板等部分,控制芯片是核心,成本占比超过50%。控制芯片的性能关系到伺服驱动器的响应速度和控制精度。此外,电源模块主要用于向伺服电机供电,信号采集模块用于采集电机转子的位置、速度、加速度等运动信息,产生控制信号。从成本端看,伺服驱动主要成本为材料费用,其中IGBT、DSP芯片占总材料成本的50%以上。
智能关节是机器人运动能力重要载体,控制算法难度大大增加。相较于传统机器人,人形机器人的运动控制算法难度大大增加,主要表现在人形机器人有更加复杂的运动控制规划,以及更加复杂的传感和反馈控制。为实现高度复杂的运动控制,人形机器人的关节通常需要更加智能化,其伺服驱动器承担部分运动控制功能,发挥“小脑”的作用。目前多数伺服驱动器均具有独立的控制系统,内部集成主控芯片,形成驱动控制一体化架构。主控芯片可以实现比较复杂的控制算法,一般采用数字信号处理器(DSP)、高性能单片机(MCU)、FPGA等芯片。
人形机器人打开需求空间,有望迎来百亿级增量市场。通常情况下,伺服电机和伺服驱动器数量为一一对应关系,而控制器可以同时控制多个伺服驱动器。从市场空间来看,以特斯拉Optimus为例,其全身具有40个关节执行器,则需要40个驱动器与之配套,在100万台人形机器人销售假设下,我们测算其配套的驱动器、控制器的市场空间分别约为80亿元、45亿元,合计125亿元,其中驱控芯片市场空间约为6亿元,人形机器人有望打开广阔增量空间。
建议关注:我们认为机器人智能关节的控制与驱动重点聚焦于驱动器和驱动器芯片两个环节,
1、建议关注国内领先的驱动器厂商麦格米特、拓邦股份、英威腾。
2、电机驱动芯片决定驱动器的响应速度和控制精度,对伺服系统至关重要,建议关注国内优质的电机驱控芯片生产商峰岹科技。
以上内容选自
国信证券《人形机器人行业专题:人形机器人产业链深度梳理》
国盛证券《机器人硬件拆解二:视觉与力控》
国盛证券《机器人硬件拆解三:柔性传感器在智能机器人和脑机接口应用前瞻》
国盛证券《机器人硬件拆解四:智能关节的控制与驱动》



