
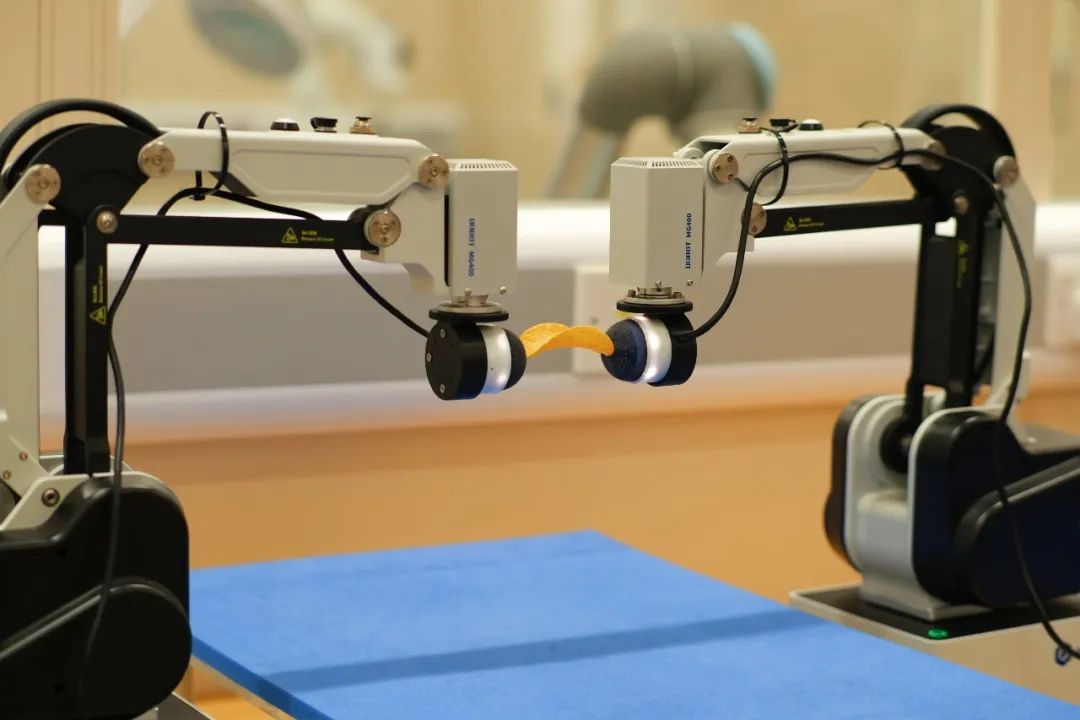
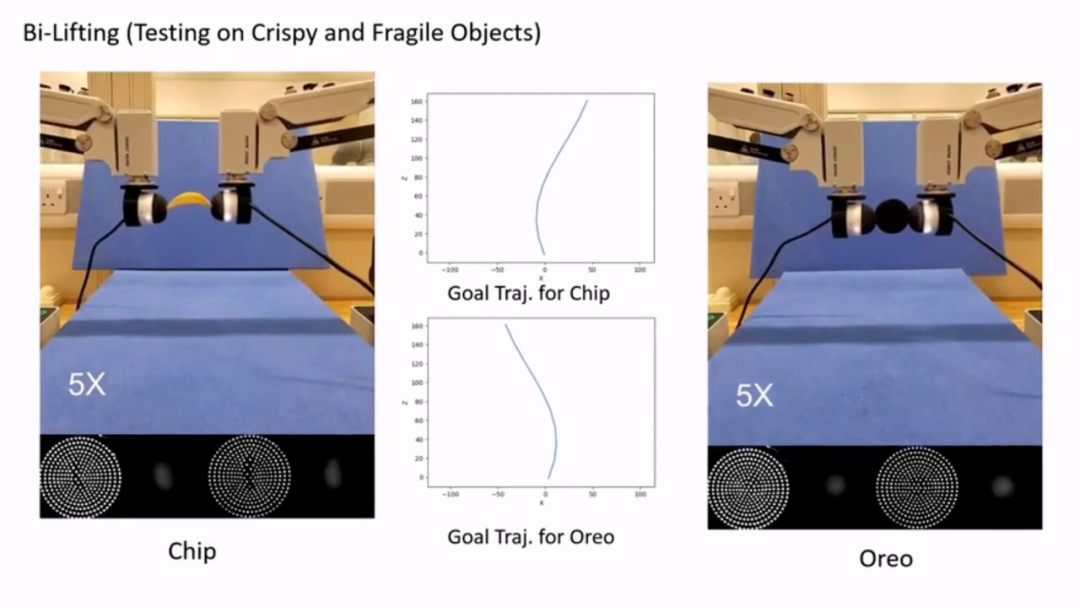
近日布里斯托大学公布了一项最新的研究报告,该机器人实验室设计了Bi-Touch系统,通过人工智能来控制双手机器人共同协作,轻松拾起一枚薯片,并保持薯片完好无损。可别小看这个研究,要知道这个动作在人类认知场景下容易,因为人类可以通过视觉观察、感知预判以及触摸来形成对动作的实时调整,但在机器人模式下,十分考验触觉灵敏度以及机器人双手的协调能力。
这项研究的成果展示了人工智能代理如何利用触觉和本体感知反馈来解读环境,进而控制机器人的行为,以实现精确的感知、温和互动以及有效的物体操纵,从而完成机器人的任务。
这项技术有助于未来水果采摘、家政服务等行业带来革命性的变化,并最终在假肢上重现触感。
研究结果发表在《IEEE机器人与自动化快报》上,论文主要作者Yijiong Lin表示,"通过Bi-Touch系统我们可以在几个小时内轻松地在虚拟世界中训练人工智能代理,以实现针对触摸的双臂任务。更重要的是,我们可以直接将这些代理从虚拟世界应用到现实世界,而无须进一步的培训。
“即使在意想不到的干扰下,触觉双手代理也可以解决任务,并以温和的方式操纵精致的物体。”
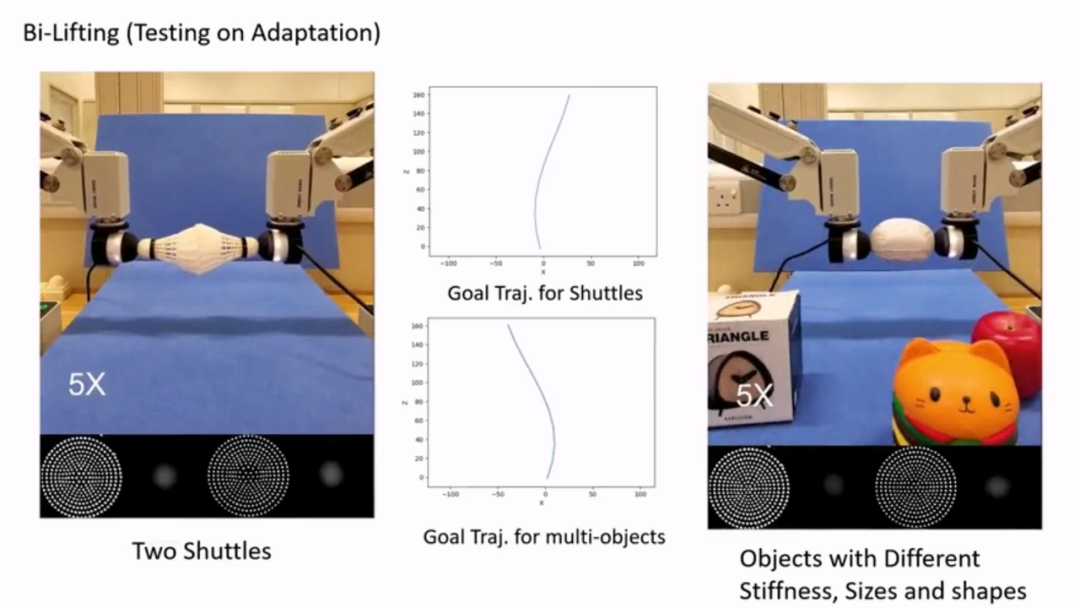
带有触觉反馈的双手操作将是机器人灵巧程度达到人类水平的关键。然而,与单臂设置相比,这个主题的探索较少部分原因是,合适硬件的可用性以及为具有相对较大的状态动作空间的任务设计有效控制器的复杂性。该团队利用人工智能和机器人触觉传感领域的最新进展,开发出了触觉双臂机器人系统。
研究人员建立了一个虚拟世界(模拟),其中包含两个安装有触觉传感器的机械臂。然后,他们设计了奖励函数和目标更新机制,以鼓励机器人代理学习完成双手任务,并开发了一个可以直接应用代理的现实世界触觉双臂机器人系统。
机器人通过深度强化学习(Deep-RL)学习双手技能,这是机器人学习领域最先进的技术之一。它旨在通过让机器人从尝试和错误中学习来教它们做事,就像用奖励和惩罚机制来训练狗一样。
在机器人操纵方面,机器人通过尝试各种行为来完成指定任务,例如,举起物体而让物体掉落或摔坏。成功时,机器人会得到奖励,失败时,机器人会学习哪些是不该做的。
随着时间的推移,它就会利用这些奖惩措施找出抓取东西的最佳方法。人工智能代理从视觉上来看是盲目的,仅仅依靠本体感觉反馈,包括身体感知运动、动作和位置以及触觉反馈的能力。
通过机器学习,最终双臂机器人能够安全地举起像薯片这样易碎的物品。
团队成员Nathan Lepora教授补充说:"我们的Bi-Touch系统展示了一种很有前途的方法,它采用高性价比的软件和硬件,在模拟中学习触觉双臂行为,并可直接应用于现实世界。我们开发的触觉双臂机器人模拟由于代码将是开源的,因此可以对更多不同的任务进行进一步的研究,这对于开发其他下游任务来说是理想的选择。”
论文作者Yijiong Lin总结道:"我们的Bi-Touch系统可以让触觉双臂机器人从模拟中进行大量学习,并在现实世界以温和的方式实现各种操纵任务。现在,我们可以在虚拟世界中轻松训练人工智能代理,并在几个小时内完成针对触觉定制的双臂任务"。



