
近日丰桥工业大学机械工程系的助理教授Mizuki Takeda领导的研究小组,成功开发出一项应用在康复机器人领域的技术,该技术利用机器学习为根据用户状态进行操作的机器人生成训练数据。目前这项研究成果已经在《IEEE Access》期刊上发表,未来有望在康复机器人应用场景下出现。
目前机器学习已经被广泛应用于估计机器人的状态。然而,传统方法通常需要大量与机器人运动相关的训练数据,而缺乏有效数据支撑的实验结果会导致机器人运动算法不精确,进而对康复对象产生不可逆的伤害,但目前来看,样本量不足且需要耗费大量时间,是限制机器人的主要问题。
现在,研究小组有了新的方法,它采用了一种全新的模式,无需对用户的动作进行详细分析,却能够准确估计机器人的状态,这一突破性方法为机器人技术带来了全新的思路。
目前康复机器人越来越多地出现在商用场景当中,站立与行走等任务成为康复机器人的研究方向,特别是老年人肌无力成为常见问题的情况下,使用康复机器人可以更好地在日常生活当中对它们提供有力的帮助,为了自动执行这些辅助任务,机器人需要准确地估计老年人的姿势状态,并根据需要提供相应的支持。这就要求机器人能够实时了解用户的状态,以便及时做出反应。

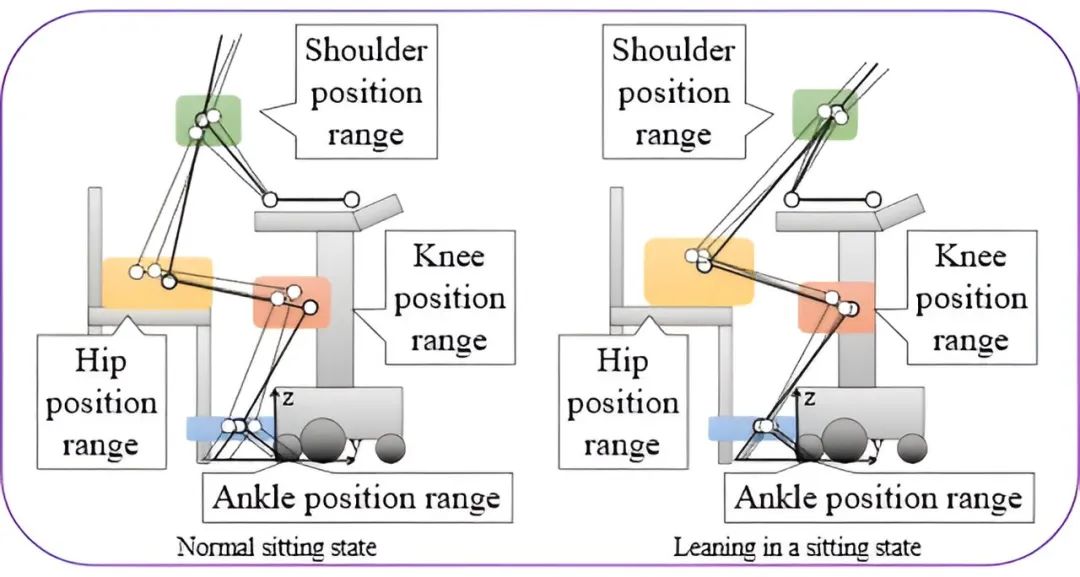
该研究团队采用了一种创新性的计算机算法,通过预估使用者的重心候选位置来实现这一目标,同时利用机器学习技术,使机器人能够智能地响应用户的需求,这一方法的特点在于,它使用了人体链接模型,而不需要详细分析用户的动作。
这个链接模型是一个简单的人体模拟,具有刚性连接和旋转关节,能够模拟各种状态下的人体位置,包括坐姿、站姿以及异常状态,从而机器人生成训练数据提供了更加可行的方案。
经过试验证实,康复机器人能够根据这些训练数据学习,准确估计用户的状态,并且在检测到异常情况时,能够停止当前动作并帮助用户恢复到正常状态。这项创新技术有望为护理机器人领域带来重大突破,改善老年人的生活质量。
此外,这项技术有望在工业机器人和通信机器人等领域得到应用,这些领域的机器人同样需要准确估计用户的状态,以便进行相应的操作。
未来,研究团队计划继续改进这一技术,同步开发一种基于干扰的机器人系统,实现人机更高效,更安全地互动。



