
软机器人具有优异的结构柔韧性,可以很好地适应各种复杂地形,并显著降低结构和控制的复杂性。在不同环境下工作的软机器人受到了研究人员广泛的关注,如:管道垂直爬行机器人、爬墙机器人和快速转弯机器人等。然而,一个软机器人最多只能适应两到三种地形(例如,粗糙的地面和沙子),地形适应性仍然远远落后于自然动物。有腿的运动结构和运动方式具有良好的灵活性,是适应不同地形的一种很有潜力的方式。受昆虫刚毛阵列的启发,西安交通大学刘益伦教授团队设计了一种具有软腿阵列的振动机器人(VBASL),能够适应五种以上的复杂地形。
振动机器人的制备流程如图1所示:将硅胶液体浇铸到3D打印模具中,得到图1B所示的软运动结构。再将软运动结构、电池、控制模块和两个振动器拼装在一起,得到图1C所示的软腿阵列机器人。通过振动电机驱动VBASL的垂直振动,结合倾斜结构,在向下振动时腿与地面的摩擦力向前,在向上振动时摩擦力向后。向下振动时的接触压力通常大于向上振动时的接触压力,所以向前的摩擦力更大,机器人向前运动。经过实验测试,VBASL可以在42°的陡坡(图2A)、大间距的梯子(图2B)、台阶(图2C)、离散的柱子(图2D)以及粒径与腿相当的石质地面(图2E)上稳定运动。

图1 (A-C)VBASL的制备流程;(D)软腿阵列的几何形状,每个机器人安装具有11个软腿的运动阵列结构。
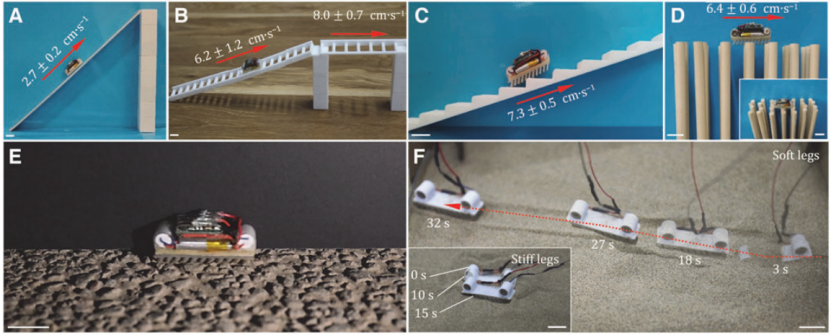
图2 VBASL的地形适应性:(A)42°陡坡、(B)梯子、(C)台阶、(D)相邻距离为其体长一半的离散柱阵、(E)石头大小与斜腿相当的天然道路、(F)沙地。
基于设计的VBASL,分析其运动行为发现机器人存在两种运动模式,即滑动和跳跃模式(图3)。滑动模式(图3A)通常发生在机器人重量较大、腿刚度较小或驱动力较弱的情况下,过程中腿始终与地面接触,向前运动时伴随着在地面上的滑动。跳跃模式(图3B)通常发生在机器人重量较小,腿刚度较大或较大的驱动力的情况下,向前运动伴随着腿的离地抬升。图3A和B中的运动速度(vx)分别为4.5和16.4 cm/s。总质量(m)、腿地接触刚度(k)、外加电压(V)对运动速度(vx)的影响关系如图4所示。由于振动幅值减小,滑动摩擦增大,vx随m的增大而减小,最大承载能力为100 g(图4A插图)。图4A中的数据还表明,对于不同的m,应该存在一个最优的刚度,即接触刚度过小或过大都表现出较差的运动性能。接触刚度和加载质量是确定两种运动模式的两个重要参数,VBASL可以自动从一种模式切换到另一种模式,以适应承载或外部环境,从而进一步提高VBASL的适应性。此外,随着施加电压的增加,运动速度呈线性增加(图4B),最快运动速度为27.1 cm/s。
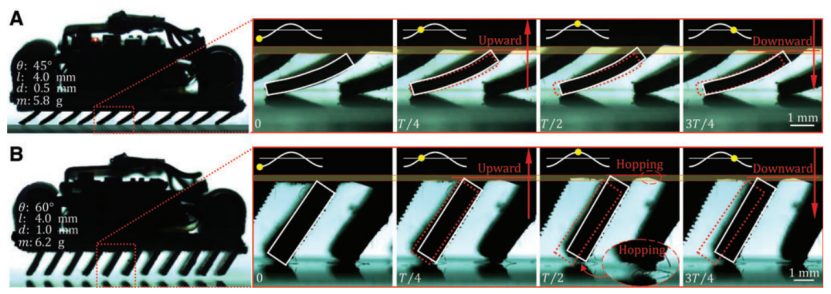
图3 VBASL的运动机制:(A)机器人的腿始终与地面保持接触,称为滑动模式;(B)机器人的腿可以随向前运动而离开地面,称为跳跃模式。左上角的黄色实心圆圈表示身体的垂直位置。带腿的初始构型由点矩形标记,而当前构型由实矩形标记。
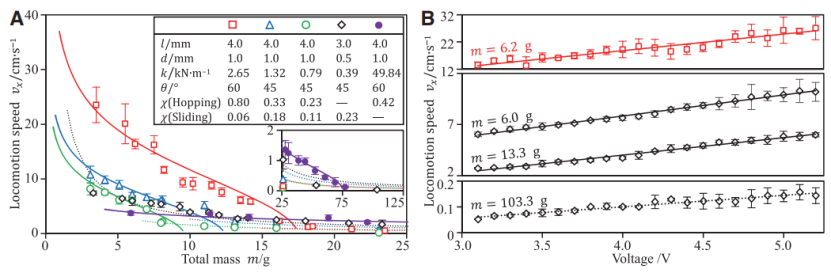
图4 VBASL的移动速度。(A)运动速度vx与总质量m的关系。数据点和曲线分别来自实验和理论预测。实线和虚线分别表示跳跃模式和滑动模式的理论预测。(B)运动速度vx与驱动电压V的关系。
通过改变机器人的配置和粘附性可以给VBASL带来不同的功能。例如,转向功能可以设计双通道VBASL,即将两个基本VBASL并行排列在一起,独立控制两个VBASL的开/关来实现。如图5A所示,远程控制双通道VBASL可以沿着给定的任意路径移动。另一个例子是具有圆柱形配置的VBASL。圆柱形VBASL除了可以在平地上运动(图5B)外,还可以在细管等狭窄空间中快速运动(图5C-E)。同时,由于所有外表面都能产生驱动力,圆柱形VBASL对翻转/倾倒不敏感。因此,它具有很好的应用前景,例如在复杂环境下的搜救和运输。
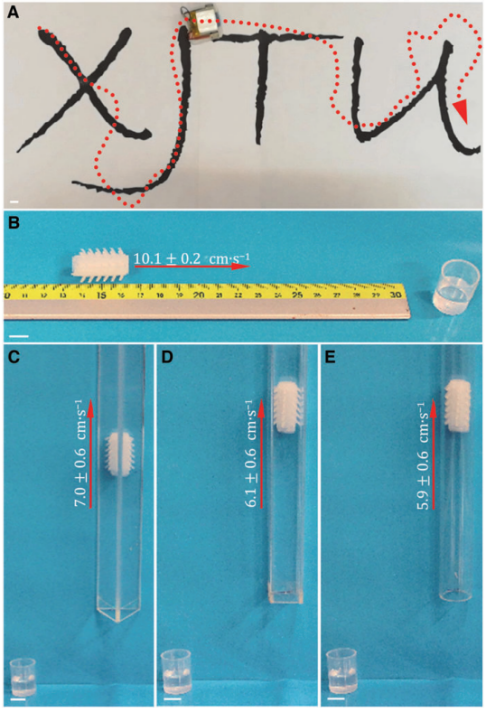
图5 不同配置的VBASL:(A)控制双通道VBASL沿指定路径运动;圆柱形VBASL在(B)平面上移动,在(C)三角形、(D)矩形和(E)圆形截面的管道中攀爬。
本文设计了一种具有软腿阵列的振动机器人(VBASL),并对VBASL的地形适应性和运动速度进行了全面的研究。综合考虑振动激励参数、倾斜腿的材料和结构参数、承载能力、地形特征等一系列因素,建立了其运动的理论模型,并进一步揭示了其优异的地形适应性和运动能力的潜在机制。软腿阵列机器人能够在振动作用下向前运动,受此启发,设计一个昆虫刚毛阵列表面,在振动作用下通过刚毛的变形和恢复也能够对表面的物体进行输运。同本文的机器人在各种地形运动一样,刚毛阵列也能够输运各种形状的物体。通过对阵列的材料和结构参数进行分析,也可以找到一个具有最佳输运效果的参数组合。
相关研究论文“Terrain Adaptability and Optimum Contact Stiffness of Vibro-bot with Arrayed Soft Legs”已发表在《Soft Robotics》
全文链接:
https://doi.org/10.1089/soro.2021.0029



