
微/纳米机器人(MNM)通过不同驱动源(化学反应,超声波,光,电,磁,热或其组合)的作用而展现出丰富的运动行为。在过去的十年中,研究人员在MNM关于靶向药物输送、肿瘤治疗、显微外科手术、生物检测以及环境监测和修复等领域的应用研究中取得了显著的成就。然而,当前MNM的运动研究主要局限在二维(2D)平面范围。实现MNM的三维(3D)空间运动控制仍然具有挑战性,特别是在垂直(Z轴)方向的运动和控制,这阻碍了其在物质运输、环境修复和生物治疗中的潜在应用。因此,人们迫切需要开发能够克服自身重力并在3D空间环境实现可控运动的高性能MNM系统。
鉴于此,浙江理工大学应玉龙特聘副教授团队联合复旦大学陈相仲博士、巴塞罗那大学Josep教授、香港中文大学张立教授和瑞士ETH Salvador教授在《Advanced Materials》上系统性地总结了近年来MNM三维运动调控的最新研究进展,包括几种利用外部场激发(如光、磁场、超声波、电场或它们的组合)控制MNM三维运动的策略。然后,简要介绍了目前厘米/毫米尺度微型装置的Z轴运动行为,为未来设计具有可控3D运动的MNM提供了潜在的理论和实践方法。此外,还重点关注了MNM的3D运动观测和跟踪技术的最新进展。最后,讨论了该领域未来的挑战和机遇并提出了新的设计理念(图1)。
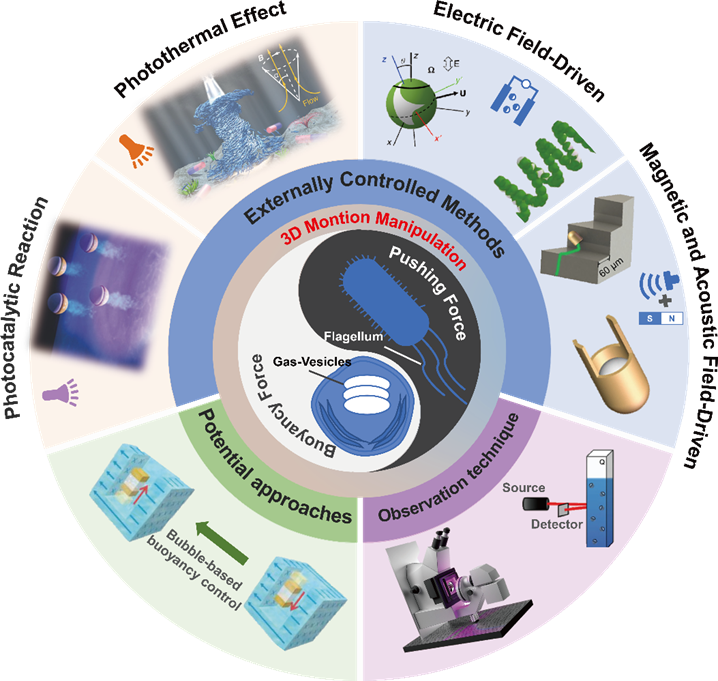
图1 3D运动MNM最新研究进展示意图
1.光驱MNM的3D运动
光驱动因其非接触性、设备简单、易于系统集成以及光束大小、强度、波长、入射角和相位等参数可灵活调整的特性而对于MNM运动的激发和控制极具优势。得益于这些特性,光可为MNM在时间和空间上实现高自由度的高效供能及控制。目前,根据其工作原理,可将光驱MNM大致分为光物理驱动和光化学驱动两大类。光热驱动MNM是一种光物理驱动的MNM,其结构设计中需要引入光热材料,通常包括有机光热材料、碳材料和贵金属。光化学驱动的MNM利用光触发光化学反应,例如光致变色或光催化效应,将光子能转化为机械能,通过多种机制产生运动,包括自扩散电泳、自电泳和气泡推进。
基于光敏材料的固有特性或光与物质之间的相互作用(即光热效应和光催化),当前具有3D运动行为的光驱MNM研究取得了一些进展(图2,图3)。
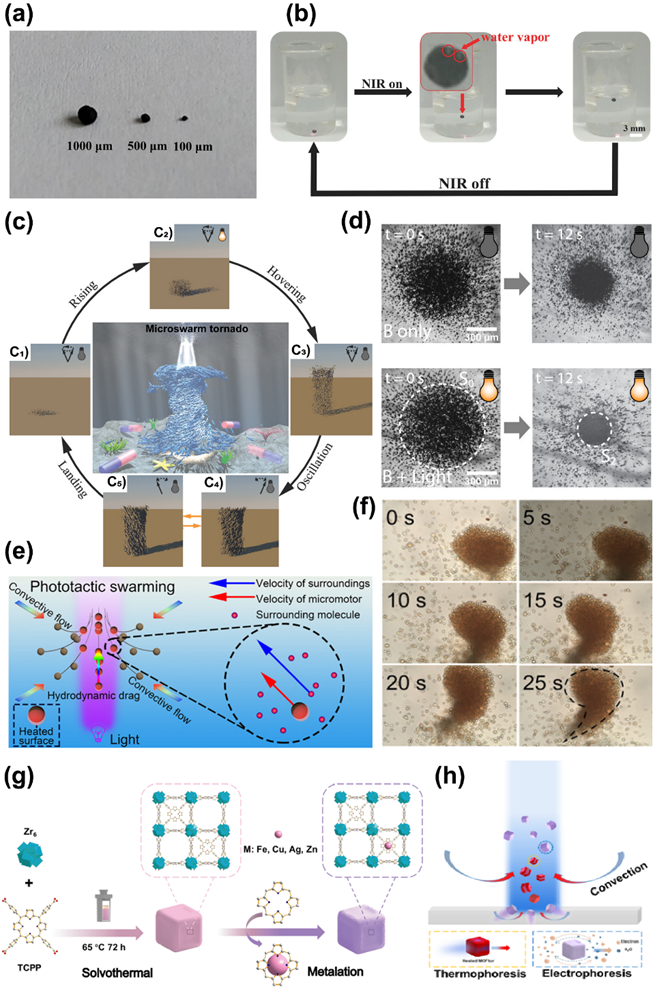
图2 基于光热效应的MNM的3D运动
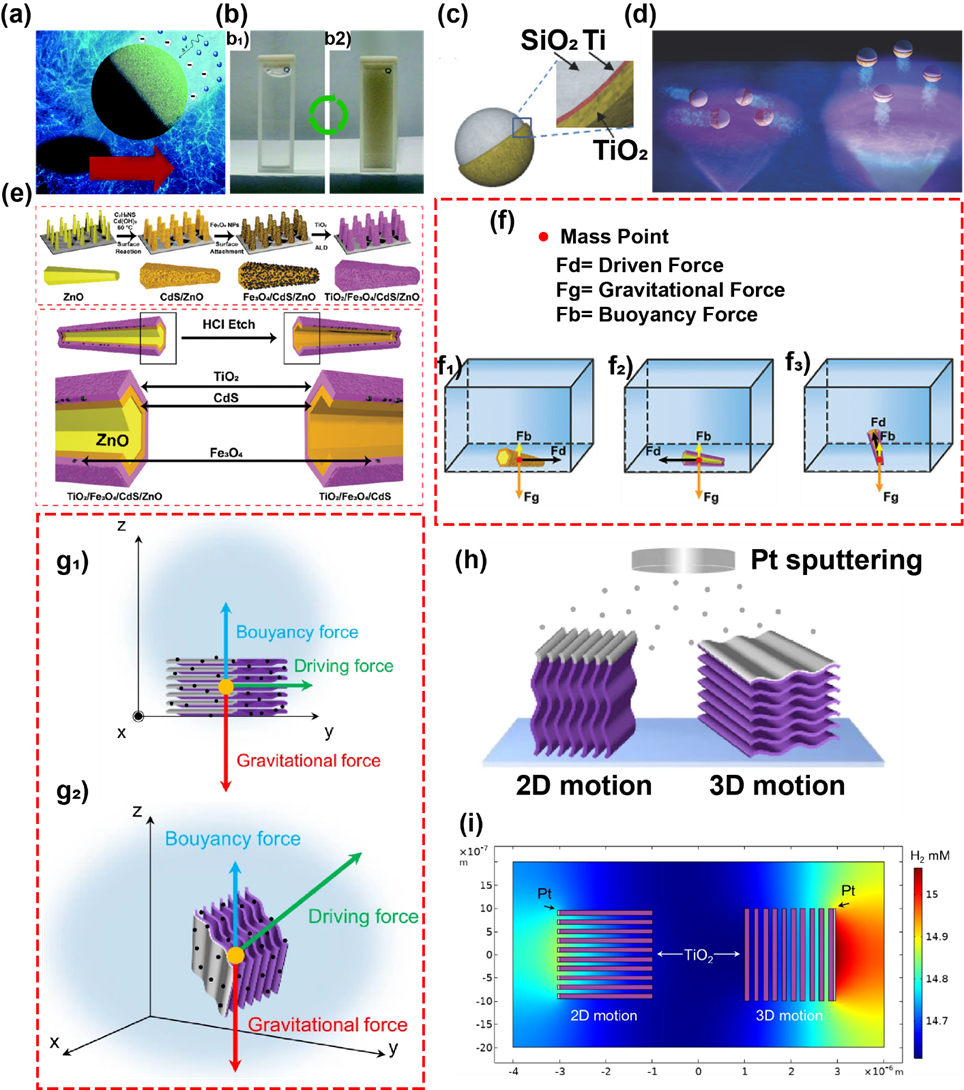
图3 基于光催化反应的MNM的3D运动
2.磁场和声场驱动MNM的3D运动
光驱动的MNM在生物应用中的适用性在一定程度上会受到限制,包括高强度光造成的损伤以及可用于生物组织的光波长窗口较窄。与光相比,声场和磁场在生物领域的应用更为广泛,因为二者在生物组织中具有高穿透性和生物相容性。磁致运动可以通过两种方式产生:(a)通过施加磁场梯度对MNM施加磁力;(b)使用动态磁场,包括振荡或旋转磁场来施加扭矩。利用磁场梯度可以直接实现MNM的3D运动,特别是在Z轴方向上。然而,在大多数情况下,由其它源驱动的MNM对抗重力的能力有限,磁力通常仅用于引导运动的方向,例如气泡驱动和光驱动的MNM。与磁力相比,利用磁扭矩可以在低磁场强度下实现MNM更复杂的运动机制,这对于生物医学应用是极具吸引力的。一般来说,MNM的简单磁致旋转运动不足以产生净位移。然而,当在物理边界附近操纵磁性MNM时,MNM的旋转运动可以在物理边界上实现垂直方向的位移(图4)。需要说明的是,依赖边界/界面产生的3D运动具有实际局限性,因为MNM需要与实体边界相互作用,以增加对抗重力的攀爬力进而实现垂直运动,在严格意义上不属于在3D空间的自由运动。因此,作者重点介绍了基于螺旋结构的MNM在旋转磁场下和基于集群的MNM在振荡磁场下的3D运动行为(图5,图6)。此外,由于声波在宽的频率和功率条件下与人体组织具有生物相容性,声场驱动用于生物医学的MNM是另一种有趣的方法。在外部驻波或行波的驱动下,MNM对声辐射能量的非接触吸收、散射或反射会产生一系列的自驱动行为。基于此,将磁场和声场相结合来实现MNM高效3D运动也是一种很有前景的双驱动策略(图7)。
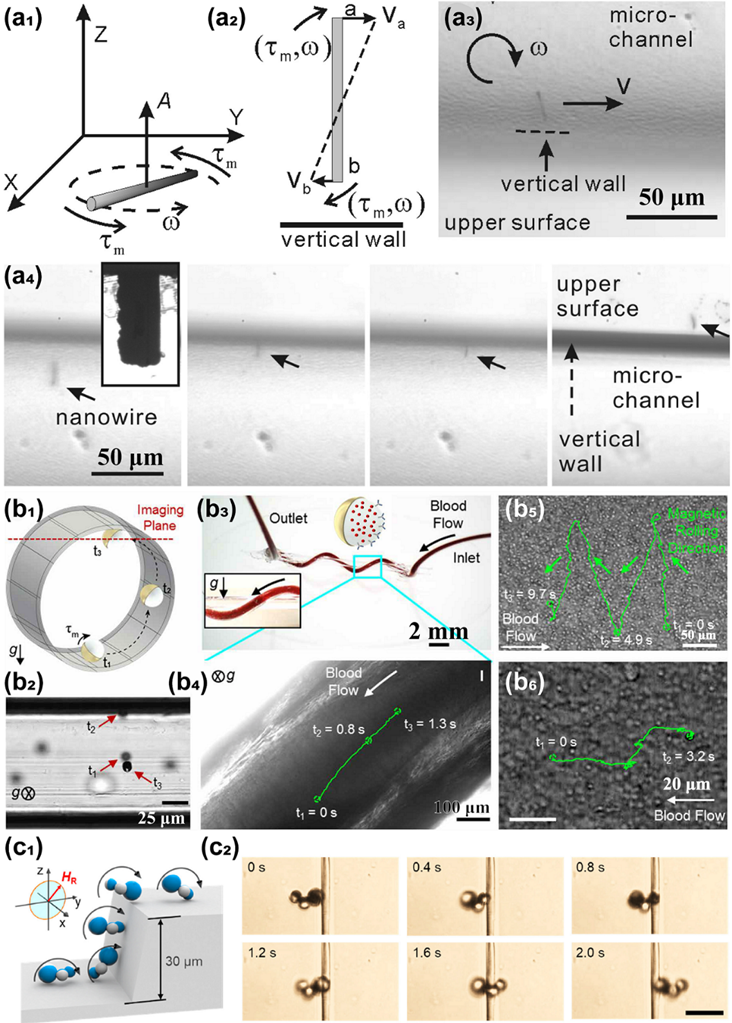
图4 旋转磁场下MNM依赖于边界的垂直运动
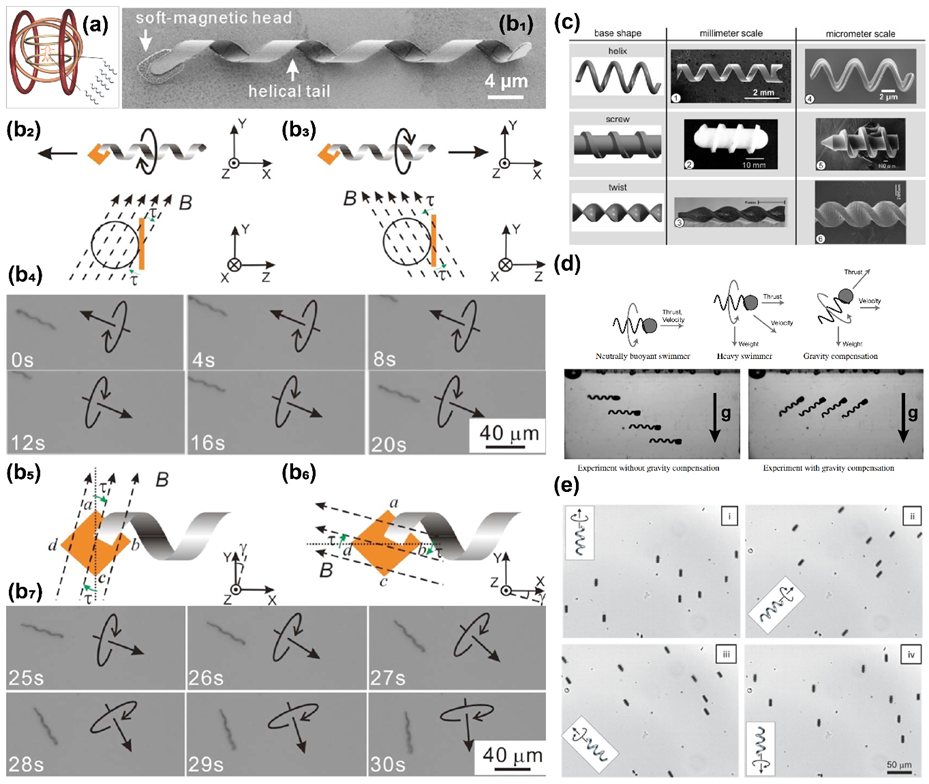 图5 旋转磁场下基于螺旋结构的MNM的垂直运动
图5 旋转磁场下基于螺旋结构的MNM的垂直运动
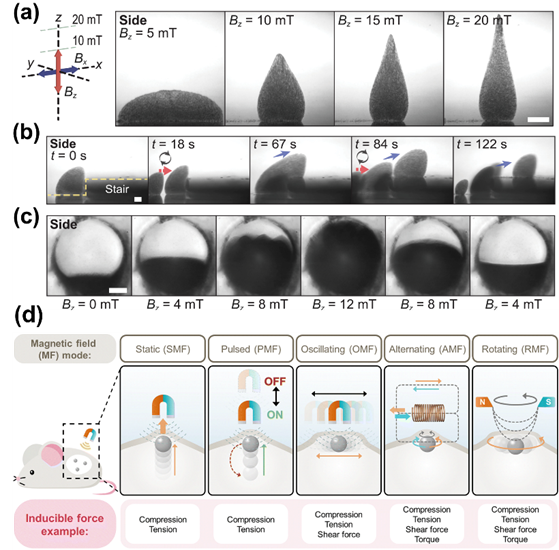
图6 基于集群行为的MNM在振荡磁场下的垂直运动及调整磁场模式以控制MNM运动行为的示意图
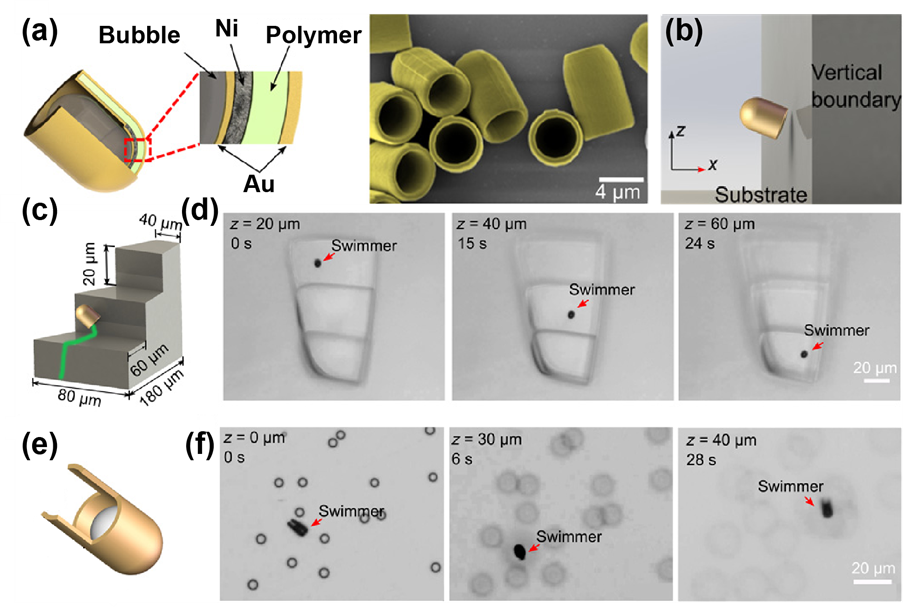
图7 磁场和声场双驱动MNM的3D运动
3.电场驱动MNM的3D运动
电场是控制MNM运动的另一种替代方法,通常称为电镊子。大量研究表明,通过恒定的直流(DC)或交流(AC)电场可以很容易地来驱动具有导电材料成分的MNM。外部施加的电场通过调节MNMs的表面电荷或诱导界面处的电化学反应,可以诱导MNM的运动或控制运动的方向,以实现其3D运动的行为(图8)。
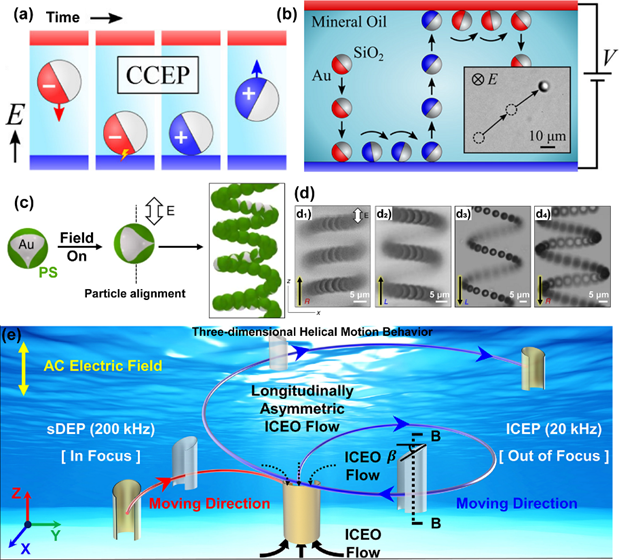
图8 电场驱动MNM的3D运动
4.Z轴运动的新策略和潜在方法
目前,关于MNM在Z轴方向运动的研究报道很少。典型的基于人工鞭毛的MNM的Z轴运动能力较差,因此当外部刺激场撤销时,很难保持其在不同深度的悬浮状态。相比之下,自然界中的一些生物可通过浮力调节来控制其Z轴运动。例如,蓝藻利用气泡,鱼类依靠鱼鳔。通过产生的气泡实现浮力调节来控制Z轴运动与气泡反冲推动MNM的Z轴运动有显著的不同。在后者中,产生的气泡附着在表面,并根据外部环境实现体积变化来调节Z轴运动。然而,基于浮力调节Z轴运动的方法在MNM领域的应用仍未大量探索,但已被一些厘米尺度的微型装置所采用,这或许能为MNM的3D运动设计及应用提供新的思路(图9)。
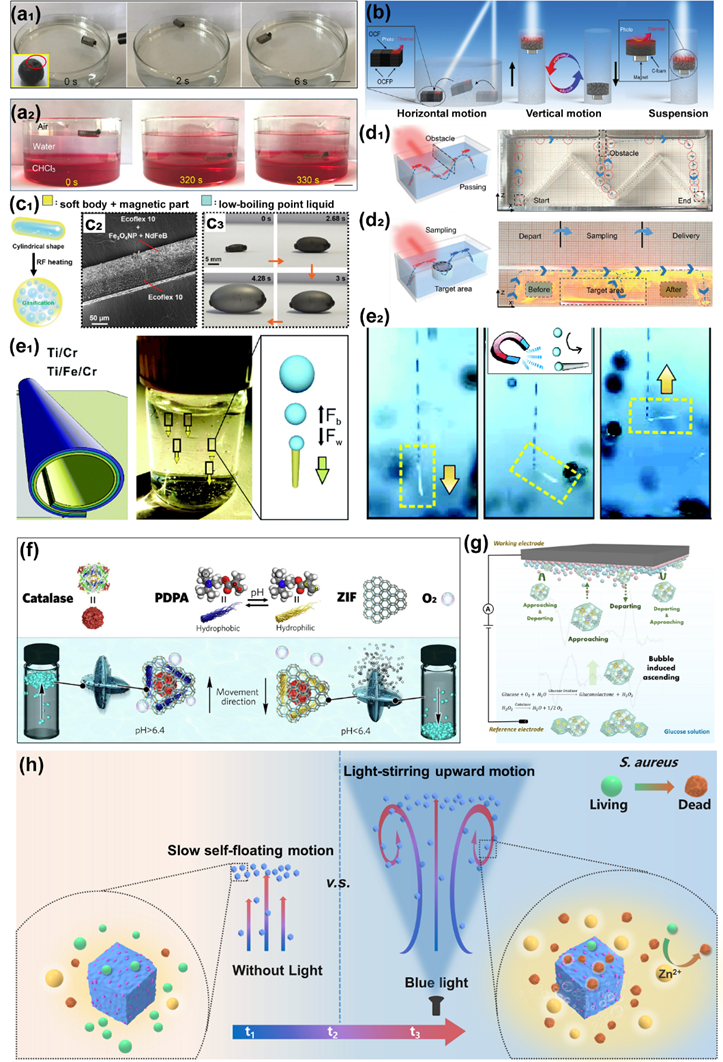
图9 设计3D运动MNM的潜在方法
5.当前MNM的3D运动观察与跟踪技术
对于微米或亚微米的MNM,传统的宽视场光学显微镜通常是MNM运动可视化的主要仪器。然而,光学显微镜系统的焦深较短(通常约为2-3 μm),需要在放大倍率和焦深之间进行平衡。当尝试跟踪Z轴运动的MNM时,它们可能会快速移出焦平面,导致MNM的图像散焦。当尺寸缩小到纳米尺度范围,传统的显微镜由于分辨率限制就无法拍摄到更多的细节。此外,在20世纪90年代,随机光学重建技术被提出,横向分辨率衍射极限推近到纳米尺度,通常被用于研究水基系统中纳米粒子的布朗运动,这彻底改变了成像领域。然而,迄今为止,这项技术尚未用于跟踪MNM的运动。如今,已有少量研究报道了3D运动观察与跟踪的技术手段(图10),但MNM垂直方向的运动跟踪和分析领域尚未得到太多关注,并且对其系统研究也存在一定的局限性。因此,需要进一步的研究来丰富运动跟踪和分析系统,特别是垂直的方向。
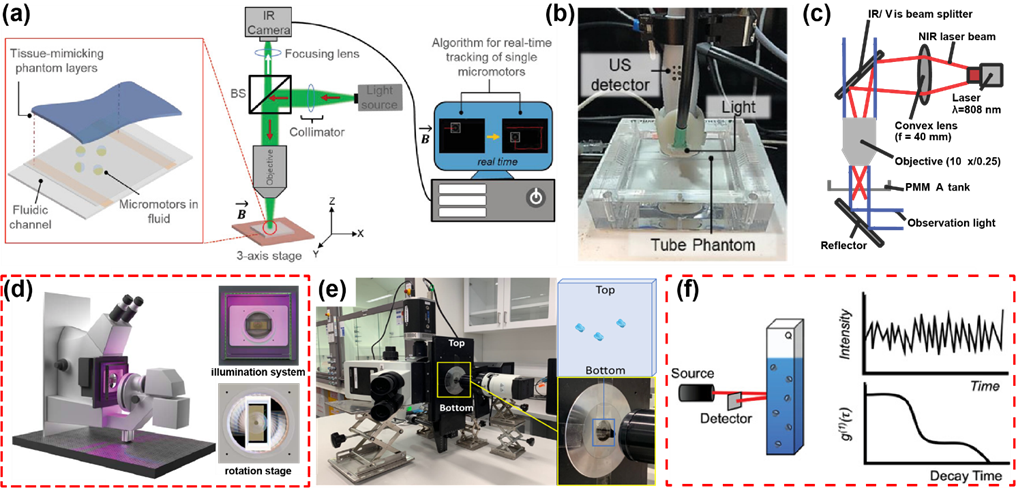
图10 当前3D运动观测和跟踪技术
总之,对于未来3D运动MNM的设计,需要探索几个研究方向,以克服当前的挑战并最大限度地发挥其在各种应用中的潜力。这些方向包括但不限于以下几个方面:(i)MNM设计过程中各种组件的选择和匹配研究,例如应激响应、能带位置、密度、稳定性、尺寸和比例。探索大规模制造MNM的最佳合成策略也很重要,这是迄今为止面临的障碍。(ii)MNM的组成/结构与其3D运动调节的实现、准确性、及时性和机制之间的关系,包括固有的物理化学反应、表面状态(亲水和疏水)、流体动力学、气泡产生、梯度场建立。(iii)探索如何在Z轴方向上提高MNM的运动效率,并在复杂环境中展现其潜在优势。例如,利用推力驱动的仿生细菌鞭毛、受蓝藻浮力调节启发的气体囊泡的结合或两者的组合等设计概念可用于解决当前控制小型运动系统垂直运动的挑战(图11)。
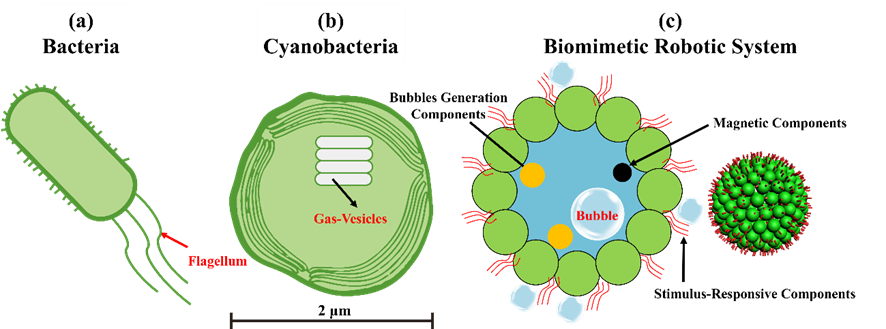
图11 自然界两种具有代表性的运动行为及潜在设计理念
参考文献:
https://onlinelibrary.wiley.com/doi/10.1002/adma.202305925
本文第一作者为浙江理工大学研究生黄海,第二作者为香港中文大学研究生杨世豪,通讯作者为浙江理工大学应玉龙特聘副教授、复旦大学陈相仲博士、巴塞罗那大学Josep Puigmartí-Luis教授、香港中文大学张立教授和瑞士ETH Salvador Pané教授。本文得到了以下基金的大力支持:国家自然科学基金青年项目(52203147),浙江省自然科学基金 (LQ22B010006) ,浙江理工大学启动资金(21212243-Y),Research Impact Fund (project no. R4015-21) and Research Fellow Scheme (project no. RFS2122-4S03) from the Research Grants Council (RGC) of Hong Kong, the ERC Consolidator Grant HINBOTs (No. 771565), the FETPROACT-EIC-05-2019 ANGIE (No. 952152), and the Swiss National Science Foundation (Project No. 192012, 190451).
作者介绍

Hai Huang received his Master's degree in School of Materials Science and Engineering from Zhejiang Sci-Tech University in 2023. He is currently a PhD student in the School of Materials and Energy at the University of Electronic Science and Technology of China. His research interests focus on MOFs synthesis and their application in micro/nanomotors and sodium-ion batteries.

Shihao Yang received his B.E. and M.E. from the School of Materials Science and Engineering at Harbin Institute of Technology in 2018 and 2020, respectively. He is currently working towards his Ph.D. in the Department of Mechanical and Automation Engineering at the Chinese University of Hong Kong. His research interests include micro/nanorobots and their collective behaviors.

Yulong Ying is an associate professor in the School of Materials Science and Engineering, Zhejiang Sci-Tech University. He received his Ph.D. degree in the School of Materials Science and Engineering, Zhejiang University (China, 2017). He has been a senior scientist in the Center for Advanced Functional Nanorobots at the University of Chemistry and Technology, Prague (Czech Republic). His research focuses on micro/nanomotor design with MOFs and stimuli-responsive materials for environmental remediation, green MOF synthesis, and 2D/nanostructured materials for water treatment and energy storage.

Xiangzhong Chen earned his Ph.D. in polymer chemistry and physics from Nanjing University. He conducted research at Pennsylvania State University during his studies. Afterward, he worked as a postdoc at ETH Zurich and later was promoted to the position of senior scientist. Since March 1, 2023, he is an Associate Professor at Fudan University, specializing in Ferroic Materials for Smart Biodevices. His research focuses on integrating functional ferromagnetic and ferroelectric materials into cutting-edge biomedical applications, including targeted drug delivery, tissue engineering, and neural stimulation.
Josep Puigmartí-Luis, a chemist, earned his Master's in Chemistry and Food Engineering from the "Institut Químic de Sarrià (IQS)" in 2003. He obtained a second Master and his Ph.D. in materials science at the "Institut de Ciència de Materials de Barcelona (ICMAB)". In 2019, he became an ICREA Research Professor and established his group at the University of Barcelona (UB) in 2020. His research focuses on synthesizing and designing functional materials in solution and on surfaces. He also specializes in microfluidic technologies to control and study the formation and function of unique functional materials and assemblies.

Li Zhang is a professor in the Department of Mechanical and Automation Engineering and a professor by courtesy in the Department of Surgery at The Chinese University of Hong Kong (CUHK). He is also a director of the SIAT-CUHK Joint Laboratory of Robotics and Intelligent Systems. Before he joined CUHK as an assistant professor in 2012, he worked in Prof. Bradley Nelson's group as a postdoc and then as a senior scientist and lecturer in the Institute of Robotics and Intelligent Systems, ETH Zurich, Switzerland. Dr. Zhang's main research interests include small-scale robotics and their applications for translational biomedicine.

Salvador Pané is a professor of materials for robotics and co-director of the Multi-Scale Robotics Lab (MSRL) at the ETH Zürich. He received his Ph.D. in chemistry from the University of Barcelona in 2008 and subsequently joined MSRL as a postdoctoral researcher in August 2008. He has been awarded the highly competitive ERC-StG and ERC-CoG in 2012 and 2017, respectively. Since 2023, he is elected member of the Institut d’Estudis Catalans in the section of science and technology. His interests lie in bridging materials science, chemistry, and electrochemistry with small-scale robotics for various applications.



