
机器人技术的目标是改善人类生活。执行沉闷、肮脏和危险任务的机器人往往使人们相信机器人将取代过去可能传统上执行此类任务的人类。然而,机器人技术的任务远远超出了机器人自主和单独执行任务的实例。随着机器人越来越能够适应任务和环境的变化,并且能够灵巧而细腻地进行概念化、移动和操作,我们将开始看到更多的机器人与人类一起工作,直接和近距离地改善他们的生活。机器人技术领域被称为协作机器人技术,其中机器人有望在同一空间内同时与人类密切合作,并作为队友执行同一任务。
根据世界卫生组织2年的数据,全球有超过4亿人面临需要康复的健康挑战(2021)。数十年来对辅助和康复机器人的研究已经取得了可喜的成果。尽管取得了这些进步,但残疾人在行动、操作和康复方面仍然面临挑战。多年来,机器人自主性的进步与康复和辅助机器人的能力之间存在着直接关系。近年来,机器人技术的许多关键进展改善了机器人的认知和感知,并为康复和辅助机器人提供了独特的机会。辅助技术可以指恢复人体或帮助替代失去的身体功能的解决方案。机器人技术是一个广泛的领域,包括机器人的构建、机器人自主性和多样化的机器人应用。机器人自主性将机器人与任何其他电子设备区分开来。为了实现自主,机器人必须能够感知环境,计划目标和必须做什么,并根据计划进行控制或采取行动,以实现预期的结果。康复机器人将机器人自主性与辅助和康复应用结合在一起,其中包括由人类佩戴或外部佩戴的解决方案。为了成为一个有效的协作者,机器人必须能够自主,预测人类队友的意图和未来的行动,并采取安全的行动,提高人机团队的表现。尽管“协作机器人”一词可能已经出现在工业应用中,但现在它扩展到了人类增强和外部机器人的所有机器人应用。
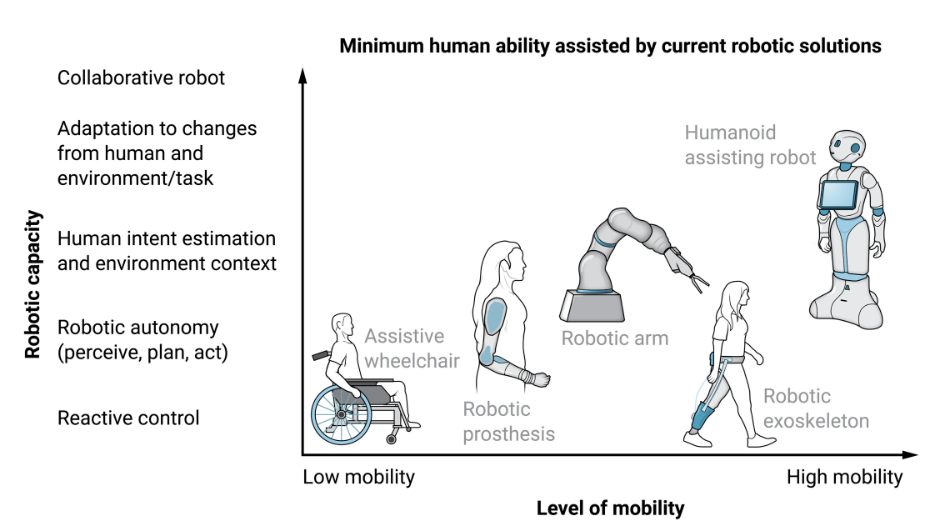
成功的康复机器人应用包括机器人辅助轮椅、机器人假肢、机械臂和机器人外骨骼。辅助机器人服务的社区可以沿着移动性和残疾的轴线来考虑,其中那些行动不便的人可能只能形成思想、移动眼睛、移动头部以及使用啜饮和吹嘴装置作为控制手段。行动不便的人可能包括身体机能整体工作但需要照顾安全和减轻压力的人。辅助轮椅使用机器人自主性在杂乱的环境中导航,同时解释人类的运动输入。机器人假肢通常利用肌肉感应输入来控制假肢。外部机械臂可以通过远程操作进行控制,人类在操作过程中远程影响机器人的动作。机器人外骨骼可以通过提供阻力或放大人所需的运动来帮助人恢复功能。突出的挑战包括需要更容易的机器人控制,因为人只能提供有限的输入,而机器人必须执行复杂的目标。需要从人那里获得更丰富的控制信号,并且需要提高机器人在辅助任务中的自主性,其中机器人执行更复杂的任务。
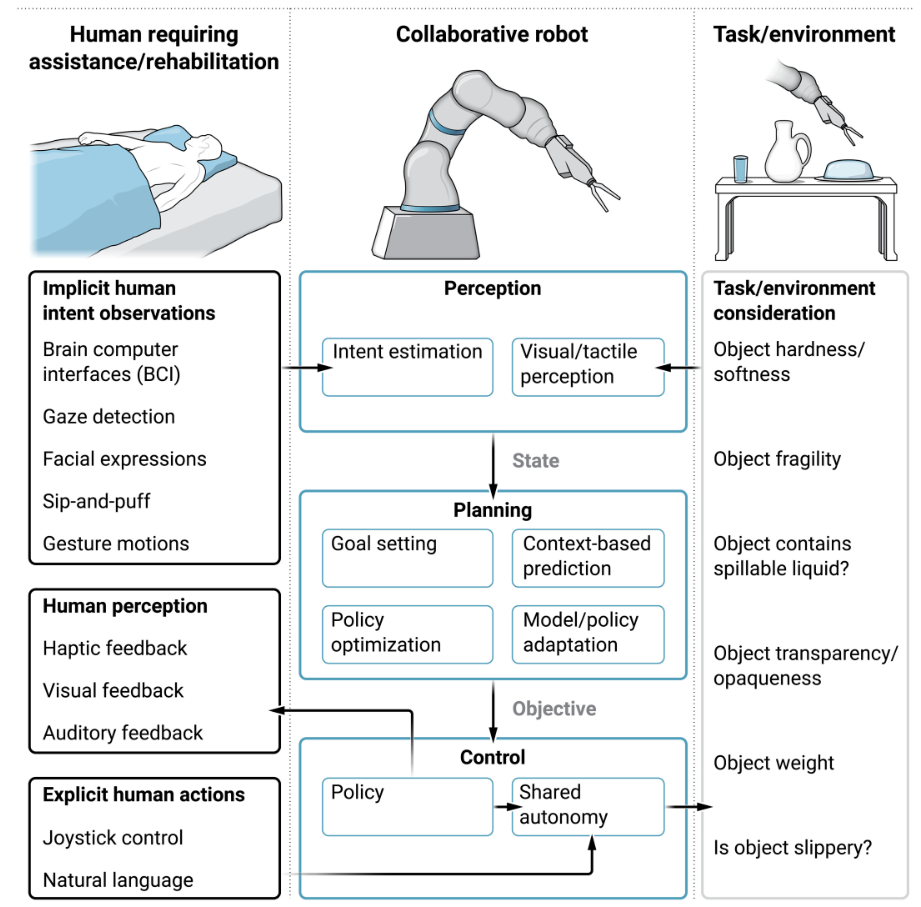
最后,还需要适应性自主性,即机器人适应人类能力、偏好和环境的变化。协作机器人的巨大挑战与辅助机器人应用的需求非常吻合。在机器人技术中,需要改进硬件设计,使系统更柔软、更安全、更轻,并且具有更长的电池存储时间,这可能意味着将存储与机器人的物理形式集成在一起。需要改进机器人感知,特别是机器人灵巧操作以及人类意图建模和估计的感知。需要改进规划,以考虑决策的统计表示以及多智能体随机决策如何相互作用。生成建模是一个很有前途的方向,但对于机器人适应,必须有语义抽象和因果关系模型,允许机器人推理任务状态之间的潜在关系。对于软体机器人系统,可以改进机器人控制,这些系统旨在与人密切合作,并在任务期间结合和融合人类和机器人的动作。机器人学习如何在很少演示的情况下完成新任务的方法也必须进一步开发。机器人还必须通过视觉、触觉或听觉手段向人提供有效的反馈。最后,机器人必须更好地适应任务或队友中的分布外或新事件。解决协作机器人的这些重大挑战将使我们能够改进辅助和康复机器人解决方案,使它们能够通过准确的意图估计来处理更复杂的任务操作,同时减少人类的输入。此外,这些协作机器人解决方案将使机器人更有能力适应用户的需求和能力,并利用情境和任务上下文来提高性能。上图显示了协作机器人原理与康复机器人的整合,以及通过赋予康复机器人协作机器人功能,解决方案将能够为更多残疾和行动不便的社区提供服务。



