
近日,韩国庆北国立大学和东亚大学的研究团队在壁虎足部微妙粘附力的启发下,成功研发出一种先进的机器人技术。该技术能够在不损坏物品的情况下,拾取和释放脆弱的材料,实现在易碎物体表面上行走。这项突破性的研究成果已发表在《先进材料科学与技术》上,研究人员希望它可以应用于工业制造方面。

壁虎足部的粘附力一直以来都是科学家们研究的焦点。壁虎足部干燥但粘稠的秘密在于其表面覆盖的微小毛发,这些毛发长约100微米,直径约5微米。每根毛发都分成许多分支,末端呈现出扁平的三角形垫,被称为抹刀。这些抹刀的尺寸非常小,以至于它们的分子与壁虎攀爬表面的分子相互作用,产生微弱的吸引力,称为范德华力。这种力量足以将壁虎固定到位。
壁虎的这种粘附能力引起了广大研究人员的关注,并激发了其在机器人技术中的应用。一种模仿这种机制的人造蘑菇状干粘合剂已被用来自动拾取材料。然而,将粘合剂从材料表面分离所需的力可能会导致其损坏,特别是在玻璃等易碎材料的情况下。
该研究文章的第一作者Seung Hoon Yoo解释说:“让粘合剂轻松剥离一直存在问题。” “为了在机器人系统中利用这些粘合力,机器人不仅要能够拾取物体,而且要能够轻松地与物体分离,以将物体留在所需的位置。”
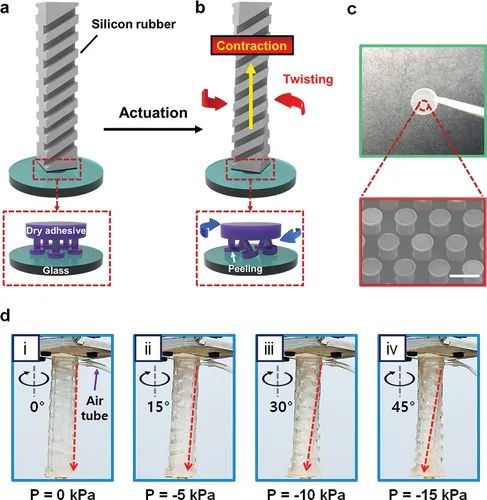
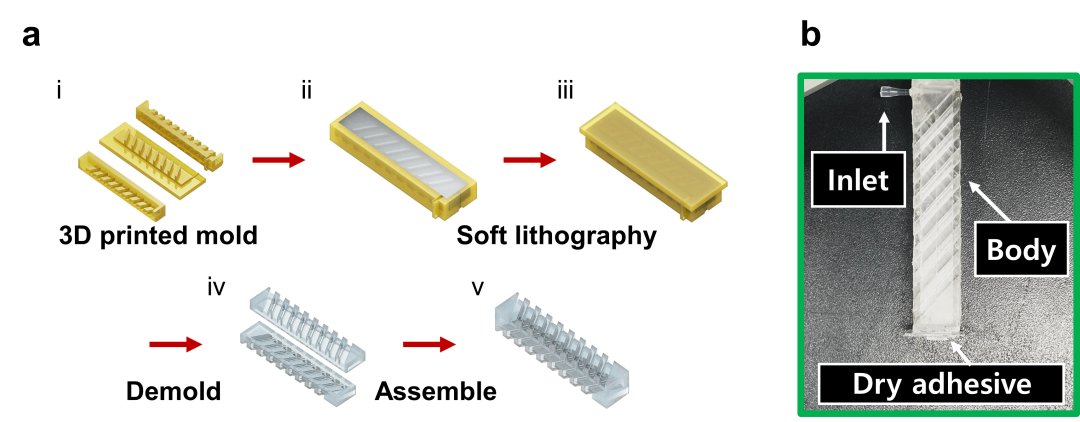
在他们的研究中,研究小组通过使用由软硅橡胶制成的真空驱动装置解决了这个分离问题。为了在不损坏正在移动的易碎物体的情况下剥离干粘合剂,他们还引入了一种新的剥离方法。这种方法涉及扭转和提升运动,将干燥的粘合剂从玻璃表面拉下来,而不对其造成任何损坏。研究人员发现,这种扭转运动的增加导致分离所需的力减少了十倍,这在处理精致材料时至关重要。

通过将他们的传输系统连接到机械臂上进行测试,研究人员证明它可以从倾斜表面拾取精致的玻璃盘,将其移动到不同的位置并轻轻地将其放下,而不会对其造成任何损坏。
该研究的作者之一Sung Ho Lee表示:“我们预计这项研究将会引起业界极大兴趣,因为许多公司对使用干粘合剂进行组件的临时连接和移动非常感兴趣,特别是在机器人应用中。”他补充说,他的团队希望通过将其应用于实际的工业应用并开发更先进的模型,成为研究和工业之间的桥梁。
-----------------END-------------------



