

第一作者:Huangzhe Dai
通讯作者:Peng Zhao,Chengqian Zhang
通讯单位:浙江大学
DOI: 10.1002/adma.202310145
▍背景介绍
生物进化产生了广泛的功能感觉器官,使生物能够感知周围环境和猎物,以提高生存能力。最有趣的感知之一是3D机械力的触觉,使人类和其他动物能够进行精细的操作,成为有效的捕食者。
随着算法、材料和制造技术的不断进步,通过对生物感觉器官的仿生工程,如鱼的侧线和人体皮肤,开发了各种各样的触觉传感器,使机器更具互动性、适应性和智能化。如触觉传感器可以感知人类手腕的运动,控制机械臂做出相应的动作,触觉传感器可以作为皮肤感受器,用于健康监测和人工假肢。另一个例子是用于流体力测量的仿生侧线,可用于自主水下航行器的力补偿和位置跟踪。
目前,已开发的触觉传感器基于多种原理,包括压电、压阻、电容、光学和摩擦电原理。也有研究将几种不同性质的触觉传感器根据各自的原理组合在一起,例如用不同的机械感受器模仿人体皮肤,来感知各种形式的接触和力。这些研究大多在高精度感知和高速响应方面取得了很大进展。然而,随着触觉传感器性能的不断提高,其内部电路的复杂性也在不断增加,这使得电路的制作变得非常困难和复杂。
此外,具有这种内部电路的触觉传感器在频繁的机械接触中,由于电路的高损伤风险,其工作稳定性难以保证,因为它不具有自然进化的皮肤神经末梢的再生功能。此外,感知维度的缺乏也使得现有传感器难以匹配人体皮肤的感知能力。因此,深入的发展对触觉传感器提出了高稳定性、快速制造和多感知维度的新挑战,促使人们对触觉传感器的设计、制造以及更重要的原理进行进一步的概念化和研究。
近年来,磁性触觉传感器因其结构简单、物理稳健性强、成本低、无线穿透性强等优点而受到广泛关注。磁触觉传感器的发展可应用于机器人精密抓取、纹理表征、流速测量和医疗等诸多领域。然而,嵌入坚硬的永磁体会削弱传感器的灵活性,使其在较大的外部冲击下容易损坏。柔性磁性材料的应用进一步提高了传感器的灵活性,更重要的是,实现了可设计的磁化强度,为基于磁性的触觉传感器提供了更多的可能性。例如,一种基于磁性的软触觉传感器令人惊讶地实现了法向力和剪切力感知与最基本的三明治结构的自解耦,这要归功于一种设计出色的具有一维(1D)正弦磁化曲线的柔性磁膜。
此外,结合机器学习技术,它可以在阵列中的每个细胞上实现高质量的超分辨率触觉感应。然而,尽管基于磁性的触觉传感器的研究已经取得了相当大的突破,但仍有许多挑战需要克服,例如无法解耦三维力的感知以及传感器与磁性元件的工作距离较短的限制。有一种采用传统多项式拟合的传感器,该传感器使用多个磁像素,并对磁场梯度进行操作,使磁传感器对高达2 mT的杂散磁场具有免疫能力。然而,霍尔传感器与磁性元件之间的距离很小,限制了其无线穿透性的优势。此外,现有的大多数磁性触觉传感器在其柔性层中都嵌入了霍尔传感器,这不仅降低了柔性,而且无法充分发挥其无线穿透性的优势。
▍本文亮点
1.本工作受这些层状结构的启发,介绍了一种具有无线3D力传感和高精度(1.33%)的分体式磁性软触觉传感器,该传感器是通过开发向心磁化排列和理论解耦模型制造的。
2. 3D力去耦能力使其能够在多个维度上实现接近人类皮肤的感知,而无需复杂的校准。
3. 得益于3D力去耦能力和长有效距离(>20 mm)的分离设计,几个传感器在空气和水中组装,以实现精细的机器人操作和基于水流的导航,偏移量<1.03%,说明了磁性触觉传感器在柔性电子、人机交互和仿生机器人中的广泛潜力。
▍图文解析
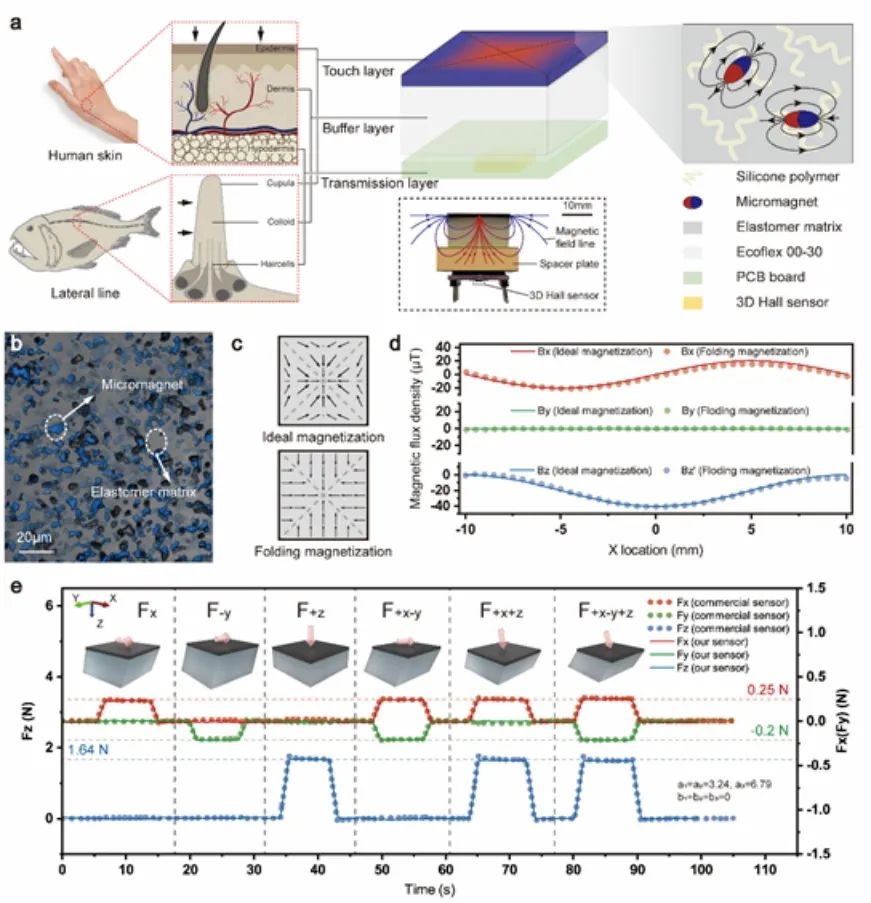
图1. 分体式磁软触觉传感器的设计与性能。a)人体皮肤结构示意图,鱼的侧线,磁性软触觉传感器。b)由微磁体和弹性体基质组成的磁膜的Micro-CT照片。c)磁膜的两种磁化方式。d)薄膜下沿x轴方向(y=0, z=-20 mm)的三维磁场分布对比。e)磁性软触觉传感器三维力解耦功能演示。(商用传感器与我们的传感器对3D力的感知效果对比)
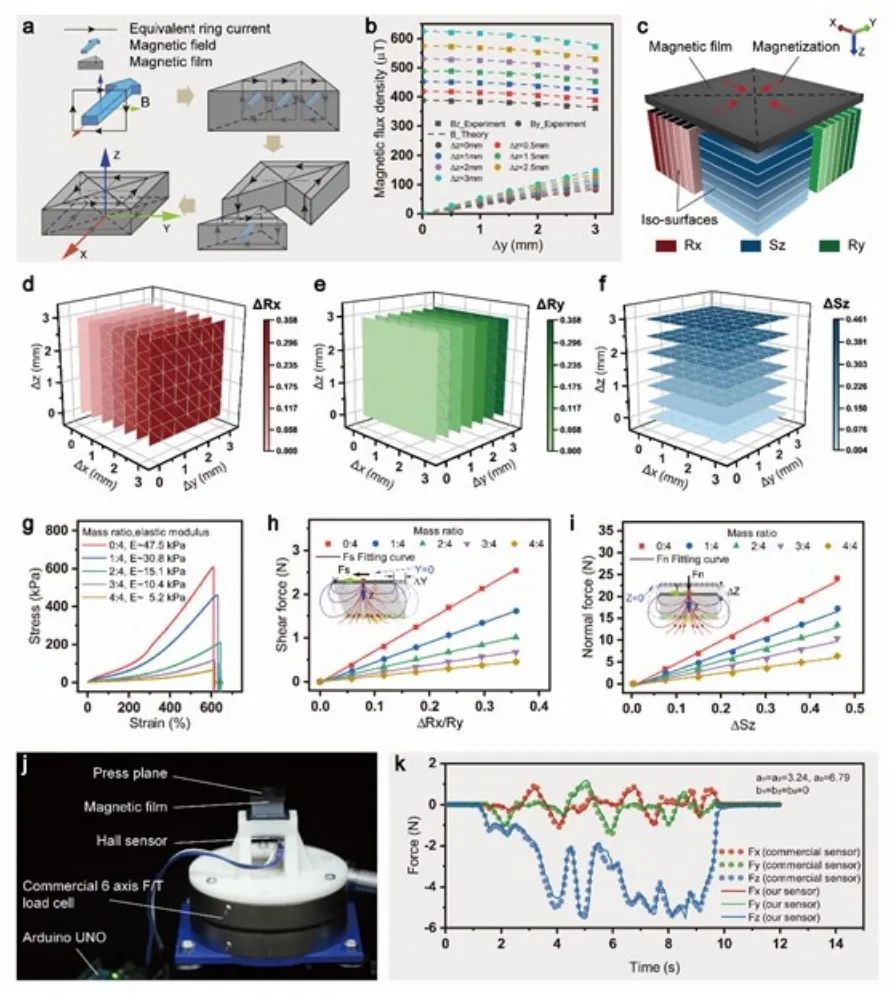
图2. 不同弹性模量基板传感器的力解耦机理及标定。a)向心磁化磁膜的磁场相当于磁膜表面的环形电流示意图。b)根据分子循环假设和实验测量,通过修正模型计算得到磁膜下y-z平面的磁性分布。c)磁膜下三个解耦参数的分布,其中Rx只与X坐标有关,Sz只与Z坐标有关,Ry只与Y坐标有关。等面表示解耦参数大小相等的平面。d)磁膜三轴位移下的解耦参数∆Rx。e)磁膜三轴位移下的解耦参数∆Ry。f)磁膜三轴位移下的解耦参数∆Sz。g)不同有机硅弹性体的应力应变关系。据此,可以计算出不同“缓冲层”的力与位移之间的关系。h)不同缓冲层传感器剪切力输出与解耦参数∆Rx(或∆Ry)的关系。i)不同缓冲层传感器法向力输出与解耦参数∆Sz的关系。j)感知人类手指随机力的实验装置。k)商用传感器与我们的传感器对随机力的传感效果比较。
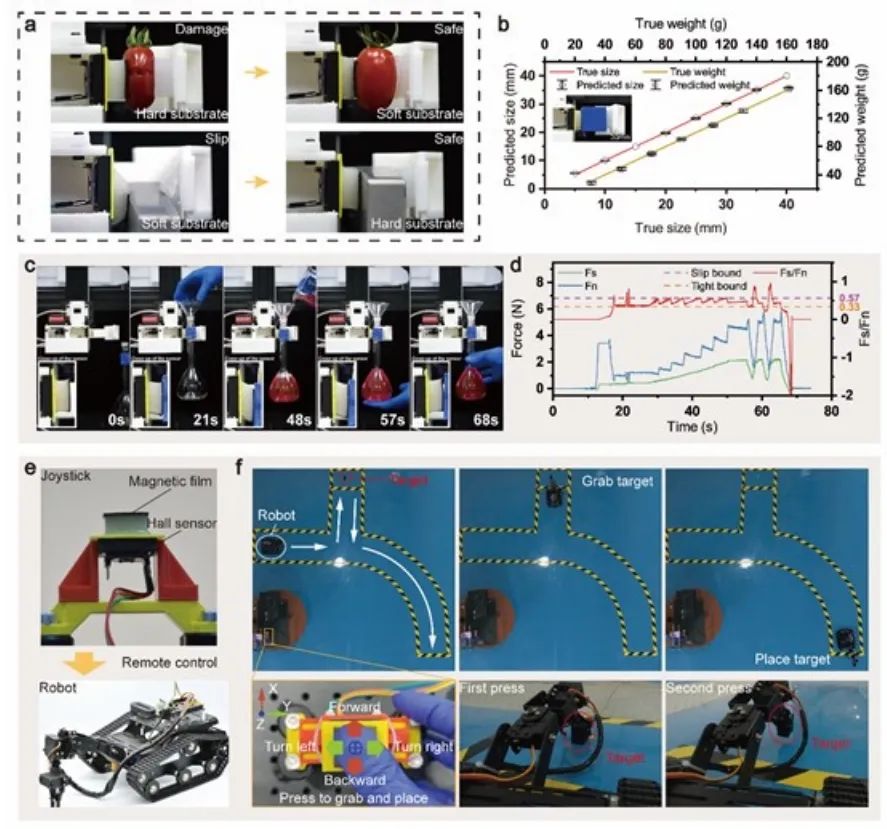
图3. 机器人手力感知、自适应抓取和三维混合力传感的演示。a)通过装备有不同基底的传感器的机器人手握住不同物体的演示。这表明我们的传感器可以通过改变衬底来适应不同的工作场景。b)传感器预测的尺寸和重量与被抓取物体的真实尺寸和重量的比较。c)机械手在外力扰动下抓取变质量量瓶的自适应抓取实验。d)自适应抓取实验中传感器感知的剪切力(Fs)、法向力(Fn)及其比值(Fs/Fn)曲线。滑移界和紧界分别表示夹持力过小和过大(Fn)。e)“操纵杆”传感器和带机械臂的履带式机器人。f)演示使用传感器作为“操纵杆”,远程控制履带式机器人抓取、运输和放置目标。
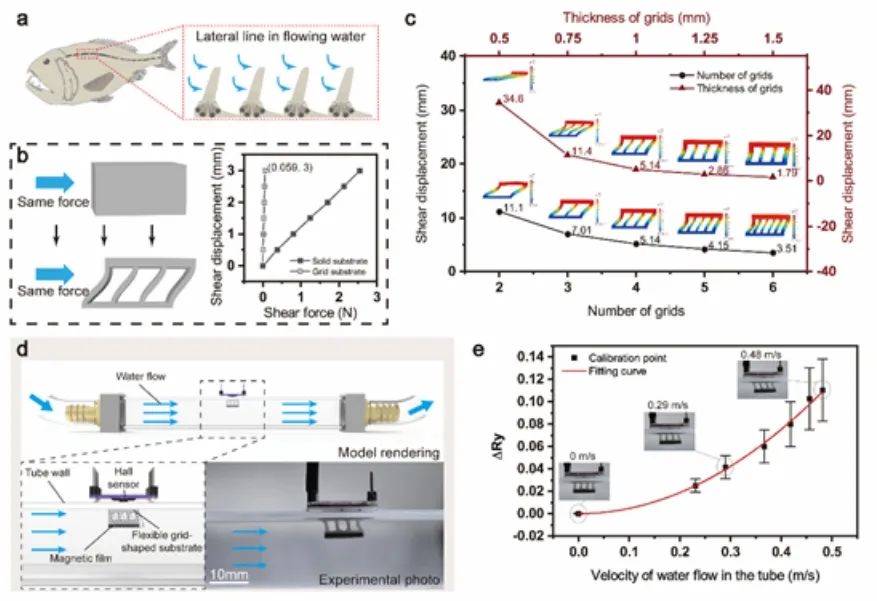
图4. 用仿生鱼侧线进行流速测量的切变传感专门化。a)尖牙鱼的侧线结构示意图。b)左:模拟侧线结构的网格状基板设计。右:两种基材的剪切位移与剪切力的关系。c)相同剪力作用下不同结构网格剪切位移模拟结果(COMSOL)。d)测量管内流速的实验装置示意图。上图:设备模型的渲染。左下:触觉传感器安装示意图。右下:管内流速测量实验照片。e)∆Ry与管内水流速度的关系。
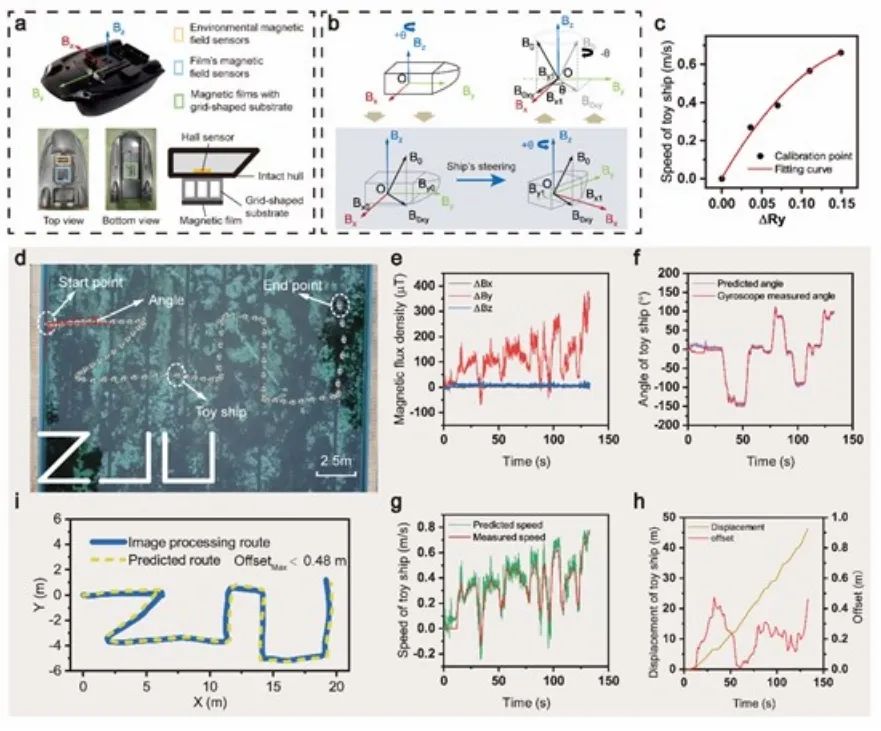
图5. 流体速度测量的导航应用。a)玩具船的插图和专门用于剪切感应的软触觉传感器的分体式安装。b)玩具船在小范围内感应恒定地磁场计算转向角的示意图,我们以传感器为参照系,将玩具船的转向角转换为地磁在x-y平面上的旋转角。c)传感器感知和计算的玩具船在池中的速度与∆Ry的关系。d)玩具船在泳池内航行的实际“ZJU”路线。e)航行过程中磁膜的三轴磁场增量,由磁膜磁场传感器的读数减去环境磁场传感器的读数得到。f)图5b所示算法预测的转向角与航行时陀螺仪测量的转向角。g)航行时的预测航速和经图像处理后的实际航速。h)航行过程中航速积分得到的船舶总航行位移和图像处理得到的全轨迹实时位置偏移量。i)预测航路(结合玩具船的转向角和总位移得到)与实际航路(通过图像处理得到)的对比,最大偏移小于0.48 m。
来源 | CAAI认知系统与信息处理专委会



