
最近,来自普林斯顿大学的研究人员设计出了一款集成电源、控制和驱动等模块的压电振动机器人,并且研究了这些模块的重量分布对机器人运动的影响,让我们来看看它长什么样。
 图. 平板式压电振动机器人
图. 平板式压电振动机器人
该类机器人上搭载了可见红外距离传感器、微型控制器、惯性测量单元、和电池等单元,整体重量仅为44.5g。真是麻雀虽小,五脏俱全~
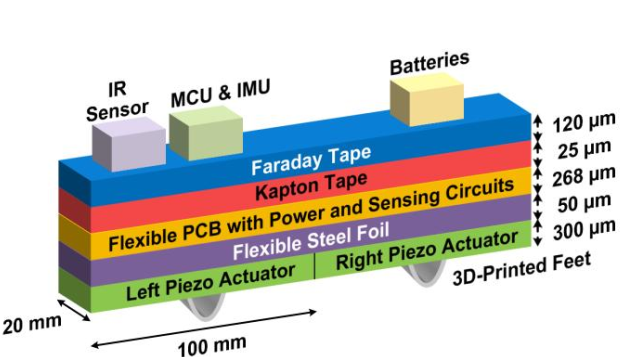
图. 平板式压电振动机器人的结构
据研究人员介绍,一个压电振动机器人上的驱动单元主要包含两个压电驱动器,而压电驱动器不是传统的压电陶瓷组成,而是压电纤维复合材料(MFC),可以说,这个压电振动机器人也属于软体机器人,并且实现了无线束驱动,功能化拓展的机器人集成设计。
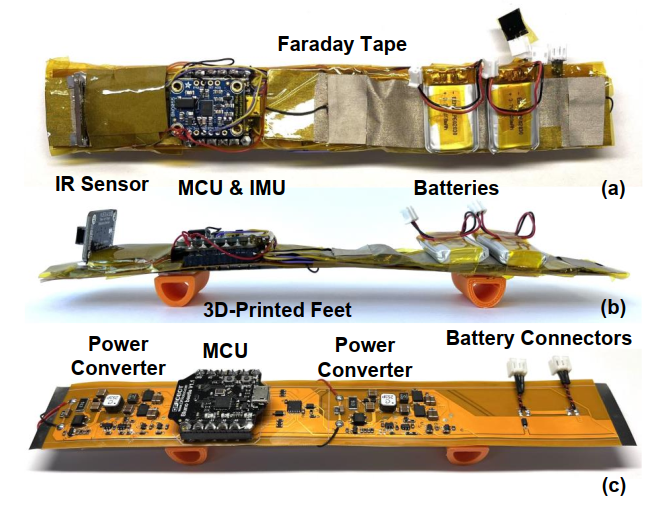
图. 可实现双向运动的压电振动机器人样机实物
不光如此,该类机器人可以根据具体应用需求实现阵列集群设计,具有高度可拓展性,下图的压电振动机器人由5个压电驱动器串联而成。

图. 搭载了5个压电驱动器的振动机器人
看起来机器人的模块布置十分随意,但设计却十分讲究。研究人员事先测量好模块的重量,通过特意布置好这些模块来使得机器人的重心不在几何中心,目的是在前后两个方向上产生非对称的驱动力,以使得机器人前进(控制器侧)或者后退运动。
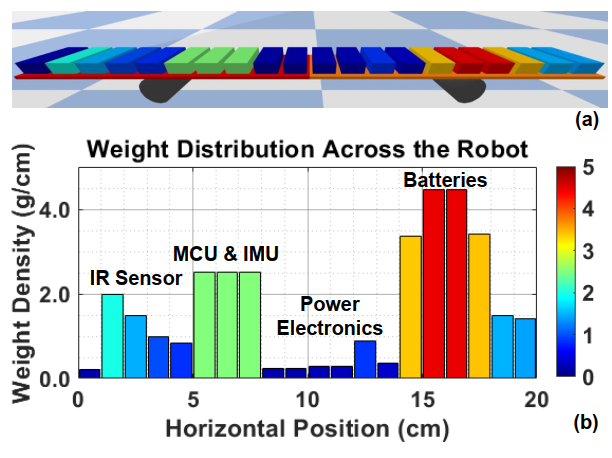
图. 机器人模块的重量分布
那到底这么小的集成机器人是怎么运动的?据研究人员介绍,因为机器人的质心并不在几何中心,机器人实现单方向运动时只需要激励单侧的驱动器即可,而且激励频率是驱动器的谐振频率。由于驱动脚相对于压电驱动器的物理位置是固定的,研究人员通过切换左右两侧的压电驱动器的激励状态来改变驱动脚的运动状态。
此外,机器人携带两颗3.7V 300mAh锂聚合物电池(30×20×6mm,每块6.2g),为机器人提供7.4V输入电压,能够连续驱动两个驱动器约一个小时。
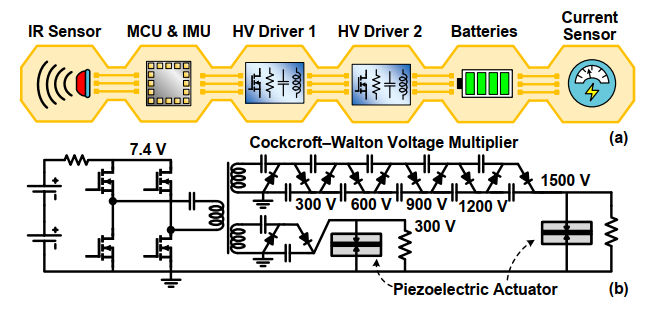
图. 压电振动机器人控制电路示意图
当对单个驱动器施加电压时,压电陶瓷产生弯曲变形,由于机器人的质心并不在几何中心,导致机器人的两个驱动脚与地面之间的最大静摩擦力产生差异,这种差异恰好使得机器人产生单方向运动,但机器人在两个方向上的运动性能并不一致,下图介绍了仅激励左侧驱动器时机器人的运动。
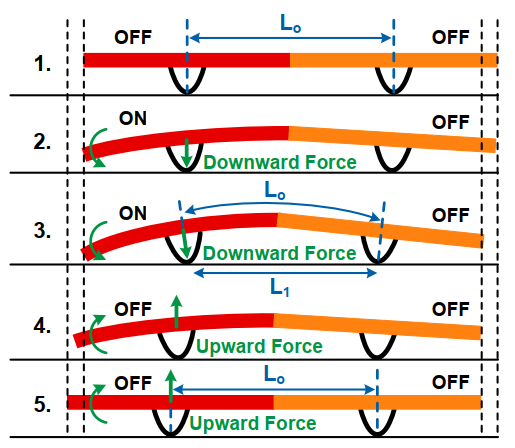
图. 当左脚的最大静摩擦力低于右脚时,压电振动机器人向左运动
在设计过程中,研究人员发现当两个驱动器以不同的频率、占空比和相位运行并且重量分布不对称时,运动会变得更加复杂。同时,因为该类机器人虽然只需要单个压电驱动器就可以工作,而且由于工作在共振模式下,因此对于机器人的结构尺寸设计要求非常严格。
因此,为了更好的设计这款机器人,研究人员构建了一个仿真工具包来协助模块化软机器人的设计,具体是基于电活性机器人仿真框架SFERS,在PyBullet软件中实现了对压电振动机器人的开发,可以准确评估压电振动机器人的运动。
图. 压电振动机器人的开发界面
因为电池的重量占据了十分大的比重,研究人员研究了三种不同电池安装位置对机器人性能的影响,通过对比,发现方案一的布置可以让机器人的速度最快(3cm/s)。
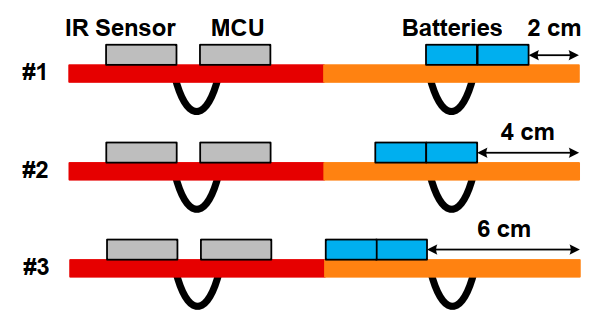
图. 三种不同的电池布置方案示意图
通过使用方案一的电池布置方案,研究人员实现了对压电振动机器人的运动控制,通过控制不同的占空比和激励频率,前进速度最大可达2.9 cm/s,后退速度最大达-1.8 cm/s。
图. 压电振动机器人在不同控制参数下的运动
不光是小而且集成,据研究人员Minjie Chen教授介绍,由于使用了3D打印的D形驱动脚,使得这种机器人在很多地形场合都可以实现运动,这种可以双向运动压电振动机器人具有结构和驱动简单、可方便地实现正反向运动等特点。在现实生活中,可以用于如管道探伤、环境监测和救援工作等应用前景。
图. 使用3D打印的D形驱动脚助力机器人实现运动
“未来的机器人系统需要高能源利用效率,”Minjie Chen教授说,这项压电振动机器人的研究能够帮助研究人员探索电气、机械和电源协同设计,以最大限度地提高能源利用效率。
普林斯顿大学的研究人员指出后续将拓展机器人的运动自由度,并且在机器人上安装应变传感器,用于预测机器人的运动速度,最终通过闭环控制实现机器人运动的精确控制。
该研究团队发表了大量有关于微小型驱动器及其电源集成的论文。这篇关于压电振动机器人最新论文在2023年IEEE智能机器人与系统国际会议(IROS)上发表,并且入围了最佳论文奖决赛。
图.机器人研发团队的Minjie Chen和Hsin Cheng
该论文上传在预印本服务器arXiv上,感兴趣的小伙伴可以自行下载~
论文链接:https://arxiv.org/abs/2303.01676



