
小型磁性软体机器人magnetic soft-bodied robots,可以根据不同运动模式进行设计,从而导航和运行在非结构化、密闭和多变的环境。这些软体微型机器人,可用于医疗应用,其中,机器人的任务就是在人体内部移动。近日,德国马克斯普朗克智能系统研究所 (Max Planck Institute for Intelligent Systems)Ziyu Ren & Metin Sitti,在Nature Protocols上发文,报道开发了具有多模态运动能力的小型磁性软体微型机器人的整个过程,包括机器人设计、材料制备、机器人制造、运动控制和运动优化。
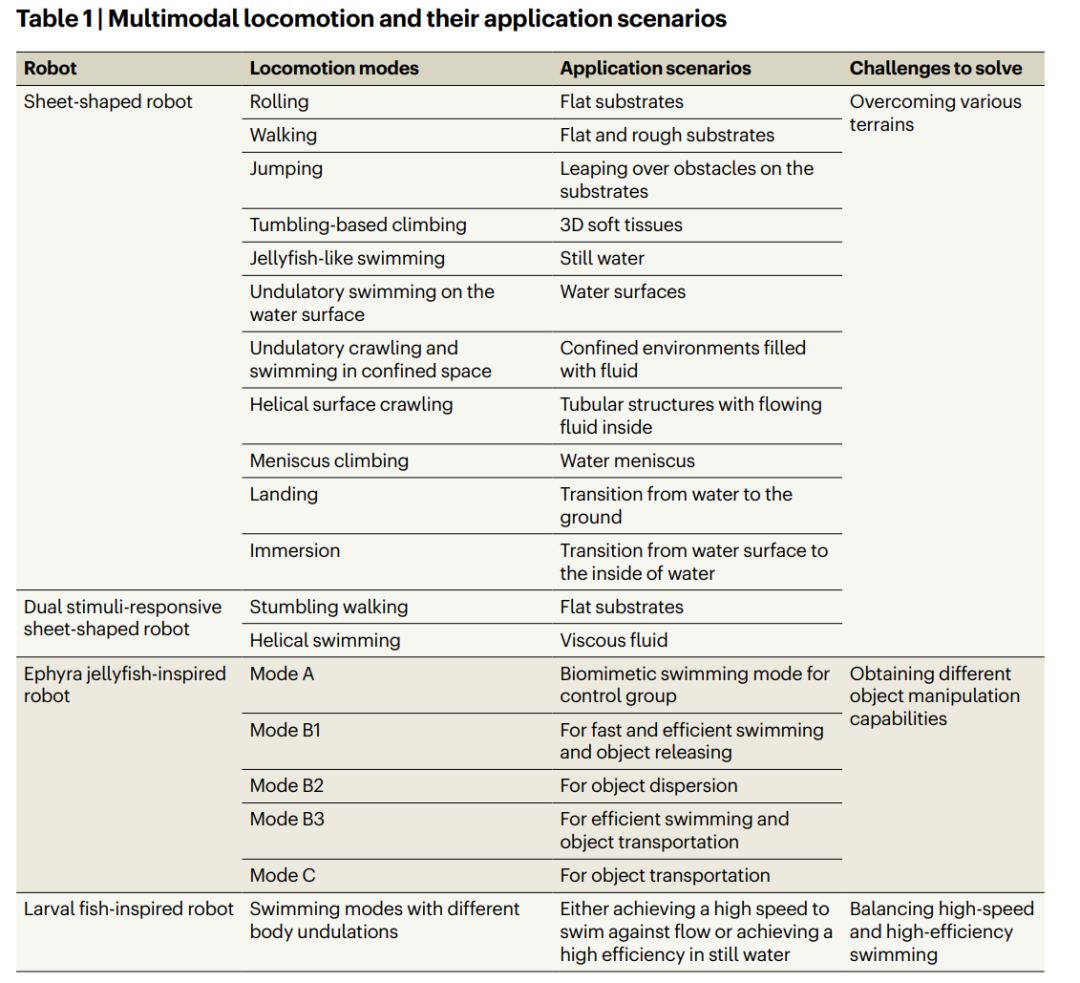
还详细介绍了具有12种不同运动模式、可穿越不同地形的片状软体机器人,并在液体中,通过各种游泳模式,以调控水母仿生软体机器人,在不同游泳速度时,调节身体刚度,以实现高效推进的斑马鱼幼虫仿生软体机器人,以及可通过响应环境温度变化自动切换运动模式的双刺激响应片状软体机器人设计、制造和控制。
该项实验过程,面向具备软机器人开发基本专业知识的用户。实验程序需要几天到几周的时间,就可以完成,具体取决于所需特征水平。
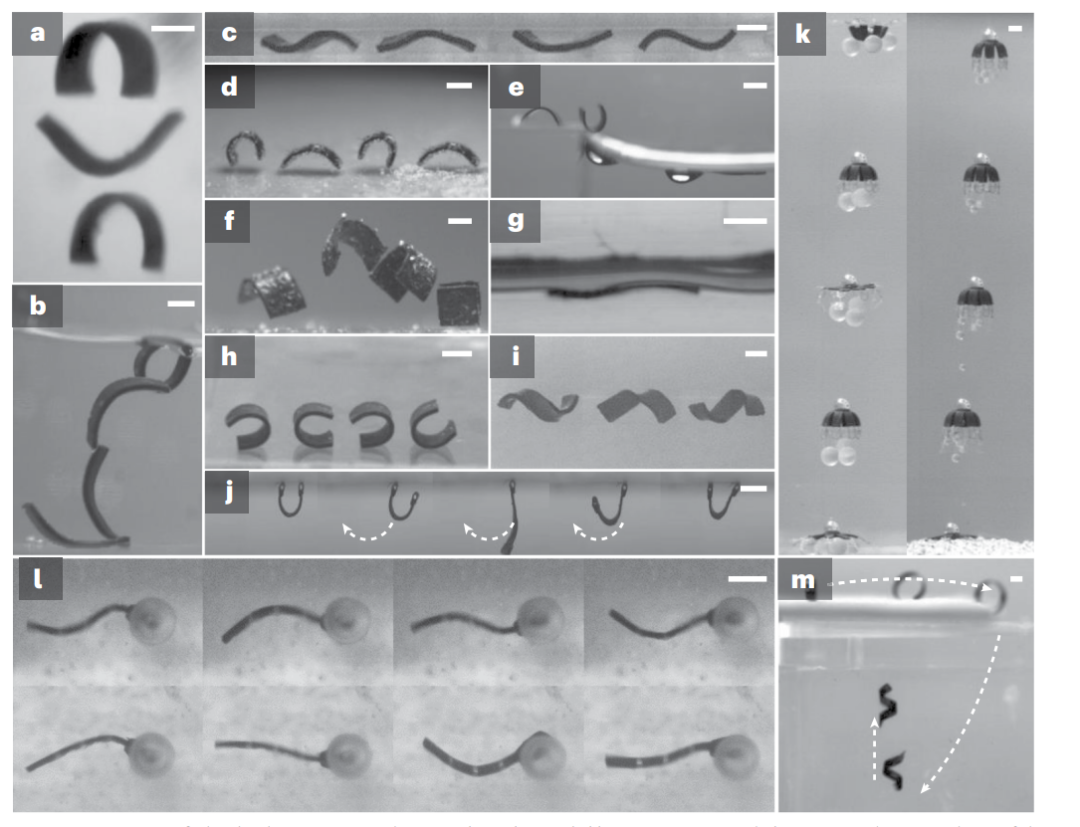
图1: 具有多模式移动能力的磁性软体微型机器人
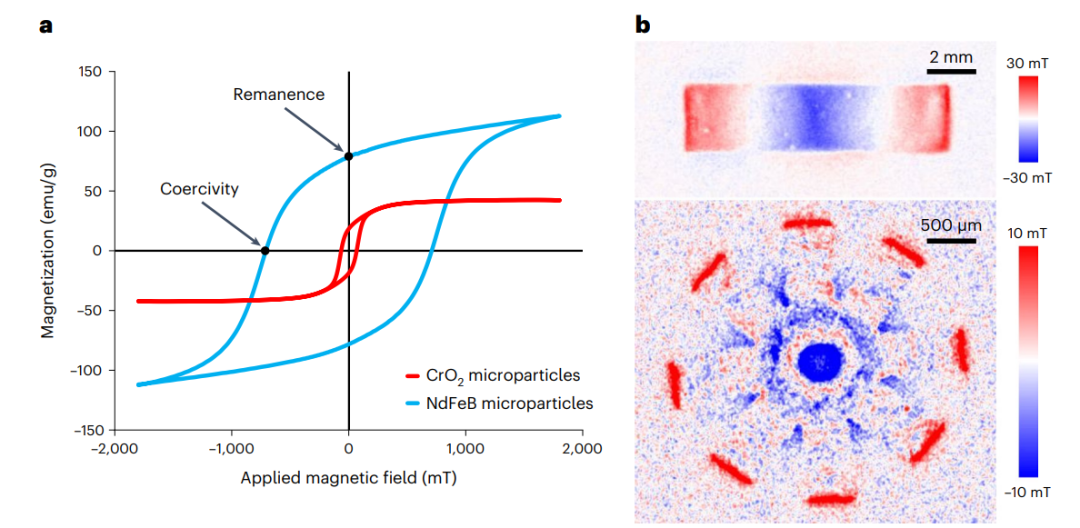
图2: 磁性材料表征的示例结果
图3: 具有多模态运动的磁性软体微型机器人设计
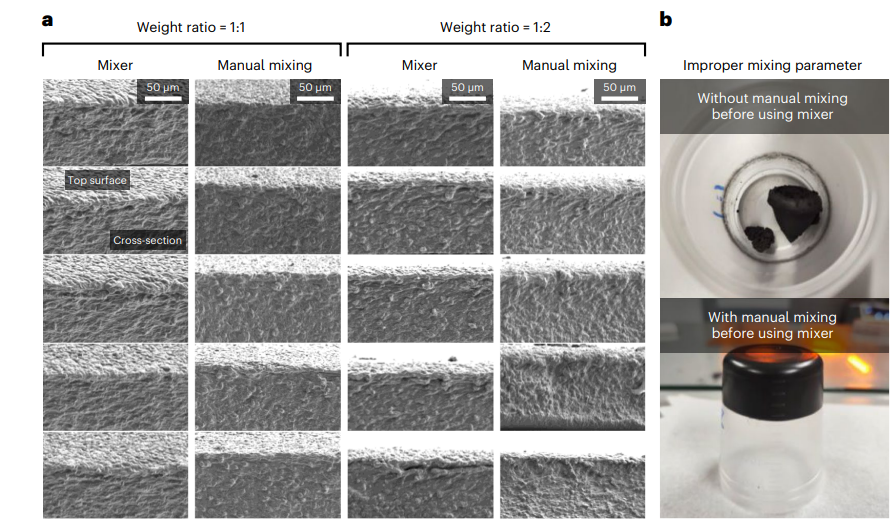
图4: 在聚合物基质中,磁性微粒的分布
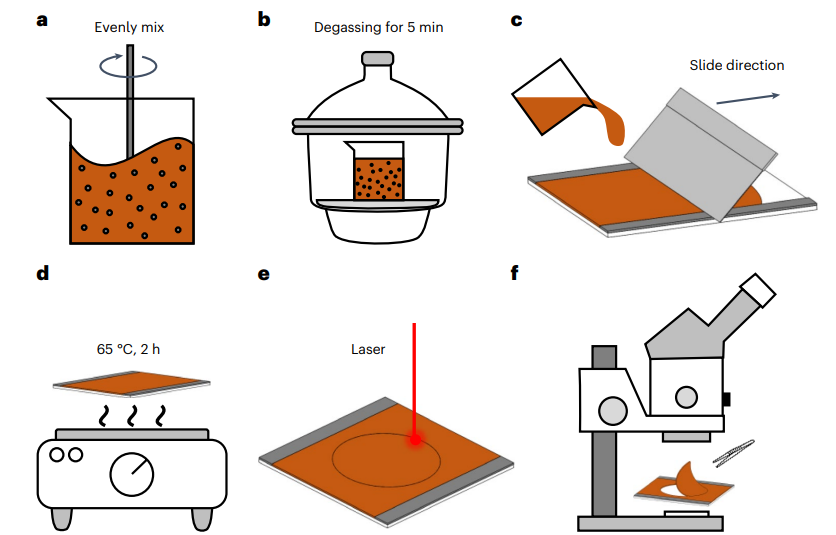
图5: 磁性软复合薄膜的制备过程
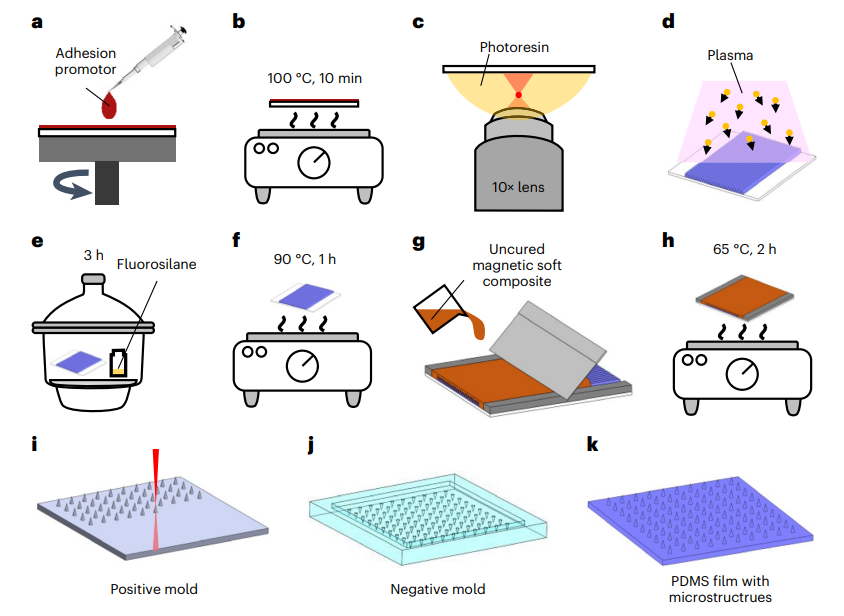
图6: 具有微结构的磁性软复合薄膜制备过程
关键点:
1、该实验协议描述了一种具有12种移动模式的片状微型机器人,用于穿越不同地形;一种水母仿生的微型机器人,用于操纵液体中的物体;一种斑马鱼仿生的微型机器人,用于高效游泳;以及一种双刺激响应微型机器人,可以通过响应环境温度自动切换移动模式。
2、刚体机器人缺乏变形能力,限制了其特定功能,而软体微型机器人则表现出复杂的运动策略,类似于小型生物所采用的策略。
文献链接:
Ren, Z., Sitti, M. Design and build of small-scale magnetic soft-bodied robots with multimodal locomotion. Nat Protoc (2023).
https://doi.org/10.1038/s41596-023-00916-6



