
近日韩国科学技术院机械工程系Il-Kwon Oh教授团队成功开发出一款采用离子聚合物人造肌肉的流体开关,该材料能够在超低功率条件下运行,并产生比其重量大34倍的力。流体开关通过控制流体流动,引导流体沿预定方向运动,从而实现机械运动,可适配在狭小空间作业,目前Il-Kwon Oh教授团队相关研究成果已在《Science Advances》期刊发表。
三年前,Il-Kwon Oh教授团队就因设计一种基于共价三嗪骨架(CTF)材料的柔性驱动器而走红。这种驱动器基于电-离子驱动原理工作,在低电压下(± 0.5 V)就能产生最大17 mm的形变,并且其形变量随着电压升高呈线性增长。此外,这种驱动器在15000次循环测试后仍能保持99%的驱动效率。由于其精准、大幅度、高耐久性的驱动特性,这种驱动器被整合为多指机械手,在人的操控下实现了在屏幕上弹奏电子钢琴的目标。时至今日,Il-Kwon Oh教授团队再度攻关人造肌肉,为仿生新材料领域带来新的研究成果。
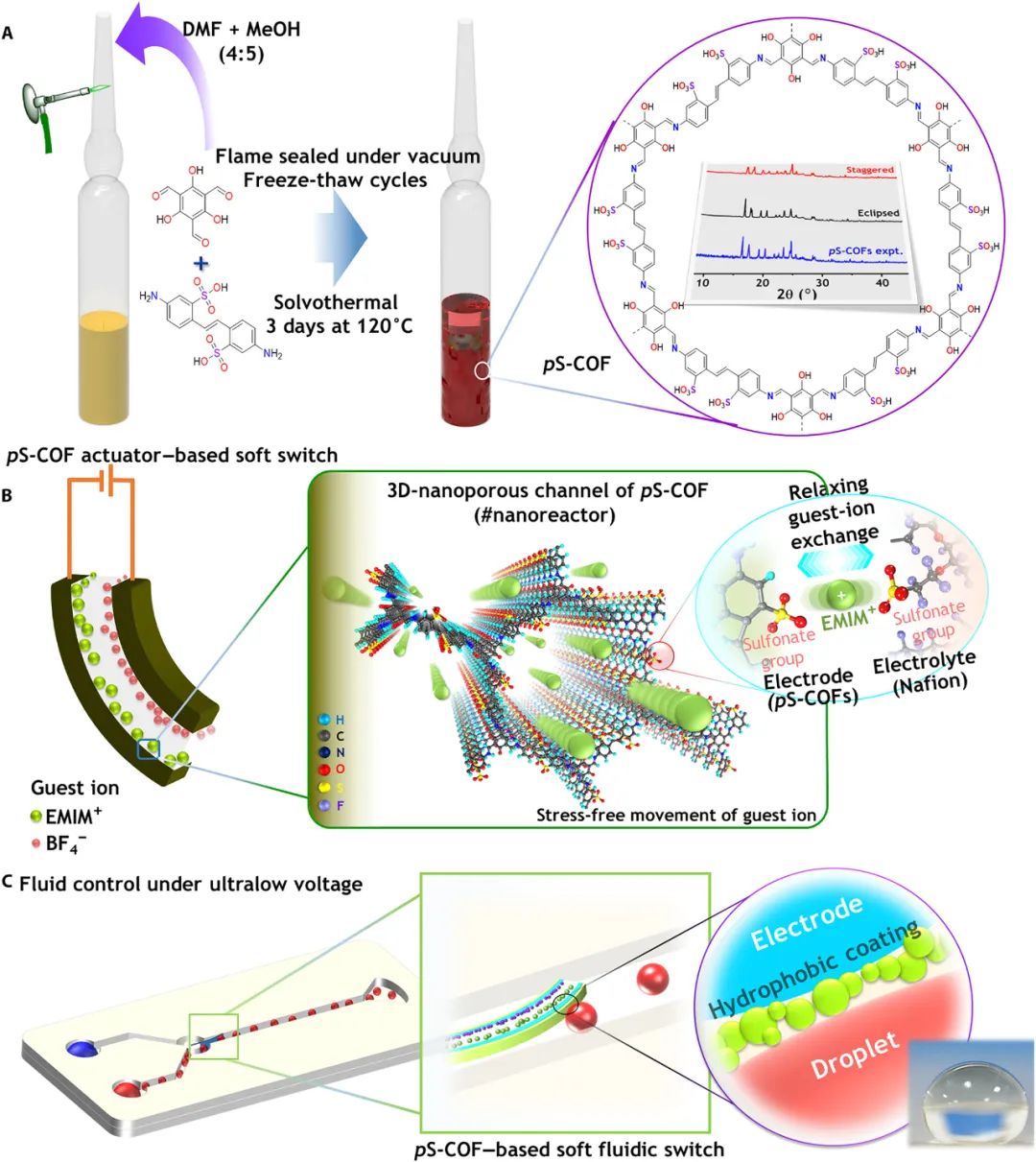
图1 pS-COFs作为电活性软流体开关的公共电极-电解质主体的合成和基本用途
人造肌肉模拟人类肌肉,相较于传统电机,能提供更自然、灵活的运动,已成为软机器人、医疗设备和可穿戴设备等领域的基本元件。为保证高效运行,对外部刺激(如电力、气压和温度变化)引发的运动的精准控制至关重要。
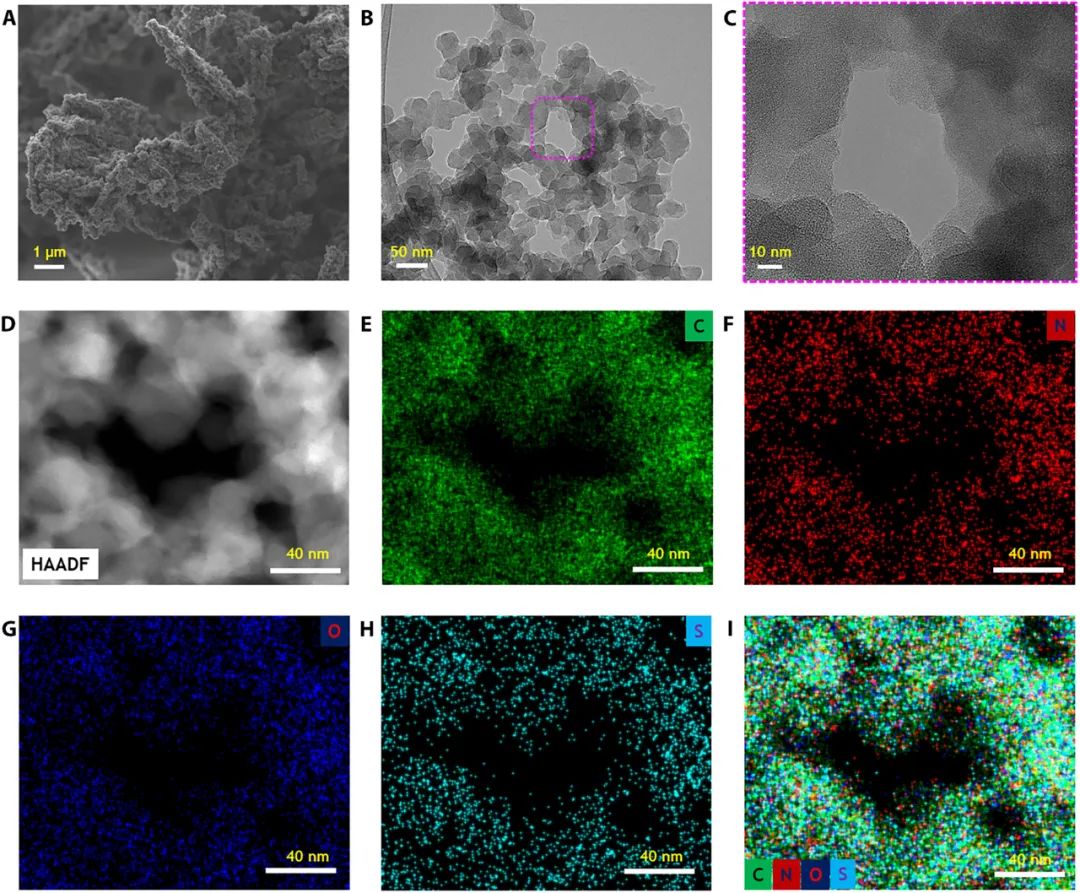 图2 pS-COF的纳米孔形态图像和纳米级结构轮廓
图2 pS-COF的纳米孔形态图像和纳米级结构轮廓
然而,传统电机开关因刚性和体积较大,难以在有限空间内应用。为解决此问题,研究团队开发了一种电离子软致动器,能在狭窄管道中控制流体流动,同时产生大量驱动力,将其用作软流体开关。
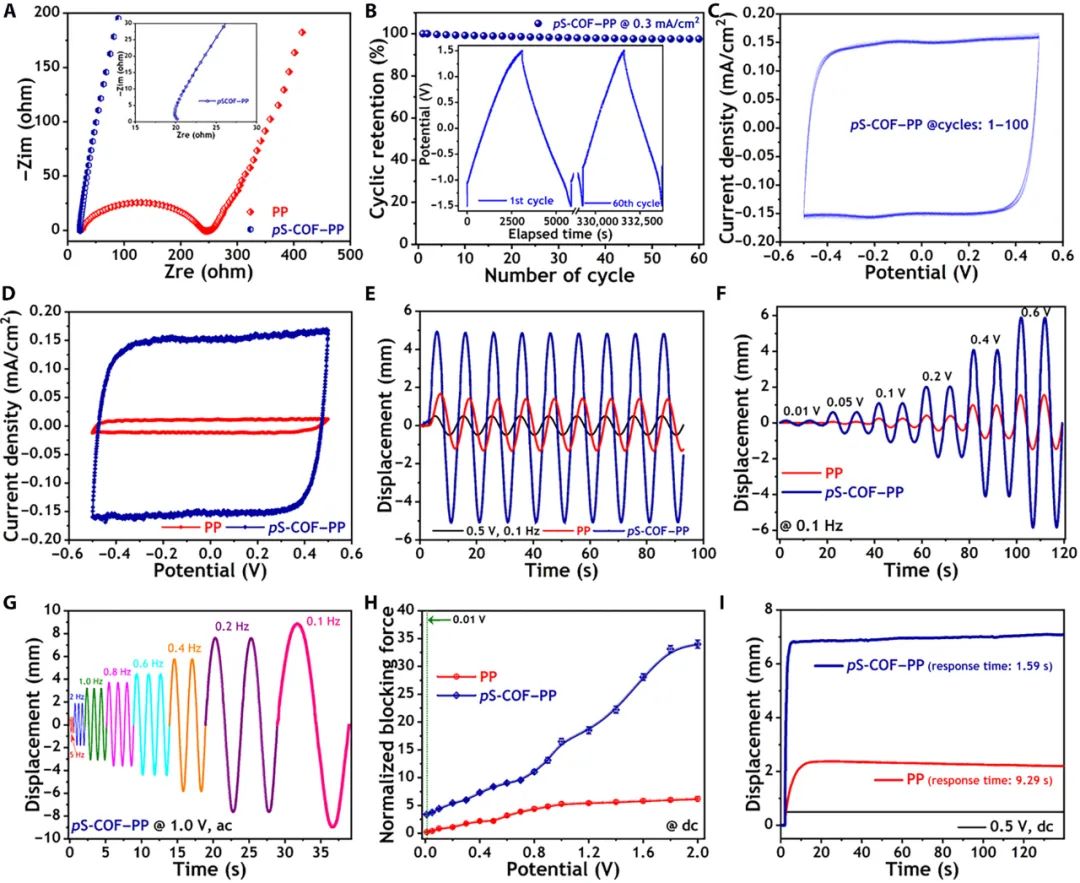 图3 pS-COFs活性电极材料物理化学和结构鉴定
图3 pS-COFs活性电极材料物理化学和结构鉴定
研究团队所研发的离子聚合物人造肌肉由金属电极和离子聚合物组成,在响应电力时产生力和运动。通过在人造肌肉电极表面结合有机分子制备的多磺化共价有机框架(pS-COF),能在超低功率(约0.01V)下产生相对其重量而言显著的驱动力。
据了解,人造肌肉的厚度被制作得如头发丝般薄,厚度为180µm,其产生的驱动力超过10毫克重量的34倍,实现平稳运动。由此,研究团队得以在低功率条件下精确控制流体流动方向。
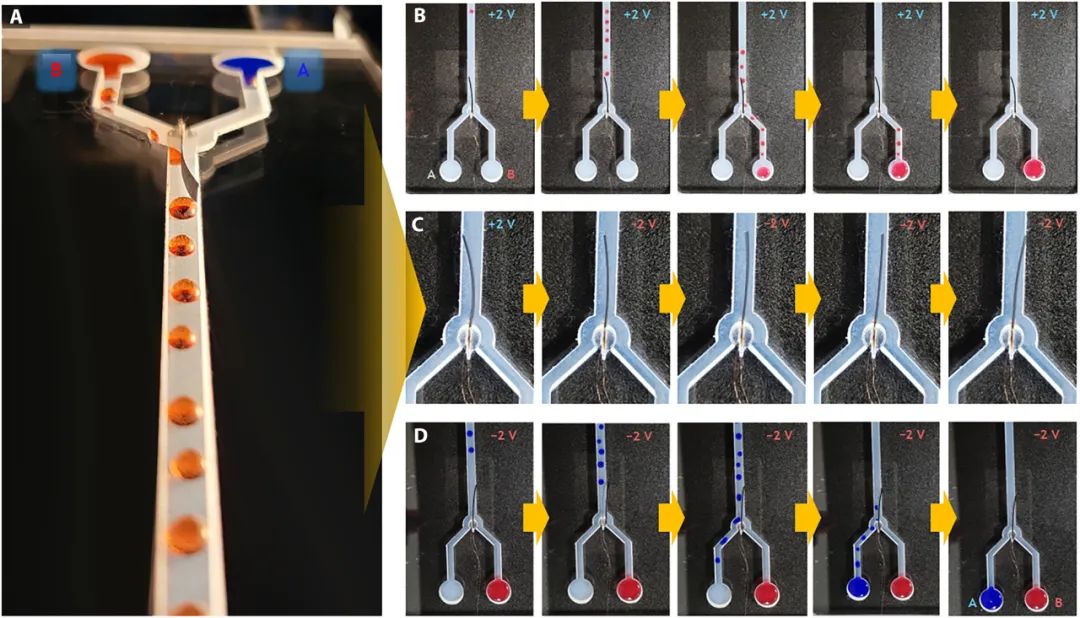 图4 电化学软流体开关来控制动态运动下的流体流动
图4 电化学软流体开关来控制动态运动下的流体流动
Il-Kwon Oh教授表示:“在超低功耗下运行的电化学软流体开关为软机器人、软电子和基于流体控制的微流体领域提供了诸多可能性。从光纤到生物医学设备,该技术有望立即应用于各种工业环境,也可以用于我们日常生活中的超小型电子系统。”
排版 | 鹅鹅
----------------END-------------------

更多精彩
*今年Q4量产!宇树发布H1通用人形机器人 搭载大扭矩高爆发M107关节电机
*荣获SNSF支持 鳄鱼仿生机器人Krock二代有了最新研究进展
*宇树又双叒叕发新品 比波士顿动力快3.6倍 速度可达6米/秒 全球最快行业四足机器人B2来了
*Science Robotics最新研究:柔性脊柱全面提升老鼠机器人的运动能力!
*小米、美的、埃斯顿、晶品特装等名企都讲了什么?第四届中国机器人行业年会观点回顾
*18大奖项3大榜单重磅揭晓!2023Leaderobot中国机器人行业奖项颁发!
*国内AGV龙头,第一大客户比亚迪,机科股份北交所上市大涨256.25%
*重磅!北航团队Science Robotics软体连续体机器人的感知及环境交互取得新进展
*专利数量8年增长25倍 从追赶到领先 中国人形机器人进入发展“黄金期”
*“53.45%复合年均增长率?”来听听国外18个关于中国人形机器人新政的一些看法
*热血铸军魂,科研为国需!祝贺解放军总医院唐佩福教授当选中国工程院院士!
*在高端装备领域贡献卓越,祝贺华中科大陈学东教授荣膺中国工程院院士!
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募, 关注机器人大讲堂公众号,发送“ 交流群 ”获取入群方式!
招募作者
机器人大讲堂正在招募【兼职内容创作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可将简历和原创作品投至邮箱: LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎朋友们的加入!

看累了吗?戳一下“在看”支持我们吧



