
在不断发展的机器人世界中,技术的无缝集成有望彻底改变人类与机器的互动方式。作为变革性创新的一个例子,飞行时间传感器(ToF)的出现对于移动机器人更好地感知周围的世界至关重要。
ToF传感器与激光雷达技术有类似的应用,都使用多个传感器来创建深度地图。然而,关键的区别在于这些相机能够提供更快处理的深度图像,而且它们可以内置到各种应用系统中。这最大限度地提高了ToF技术在机器人技术中的效用,有望使依赖精确导航和互动的行业受益。
历史上,RGB摄像机是工业机器人的主要传感器,捕捉基于场景中颜色信息的2D图像。这些2D摄像机在工业环境中几十年来一直用于引导机器人手臂进行拾取和打包应用。然而,这些2D摄像机需要进行摄像机到机械臂的校准序列,以将场景数据映射到机器人的世界坐标系。没有这个校准序列,二维摄像机无法测量距离,因此无法用作避障和制导的传感器。
自主移动机器人(AMR)必须准确地感知周围不断变化的世界,以避免障碍物并在保持在地图中的本地化的同时建立世界地图。飞行时间传感器自20世纪70年代末以来一直存在,并已发展成为提取深度数据的主要技术之一。采用ToF传感器来引导AMR围绕其环境是很自然的。激光雷达则被用作ToF传感器的早期类型之一,使AMR能够感知其周围的世界。
然而,第一个激光雷达传感器只能通过一条激光线的飞行路径来感知机器人周围的一小片世界。这些激光雷达通常位于4英寸到12英寸之间,只能看到穿过光平面的物体。随着AMR的下一代采用3D立体RGB摄像机,这些摄像机提供3D深度信息数据,从而使机器人能够更全面地感知其周围的环境。这些摄像机使用两个立体安装的RGB摄像机和一个“光点投影仪”,使照相机阵列能够准确地查看投射到摄像机前方的光。
ToF摄像机的低光性能是其显著特点之一,优先考虑人眼的安全。在远距离模式下,这些摄像机可以提供6米(19.6英尺)的范围,有利于人员和物体检测,而在近距离模式下则在体积测量和质量检查方面表现出色。这些摄像机以“点云”的形式返回数据,摄像头上的处理能力减少了计算开销,并且在仓库机器人、服务机器人、机器人手臂、自主导航车辆(AGV)、人员计数系统、3D人脸识别以及患者护理和监测等应用中具有潜在用途。
与RGB摄像机相比,ToF摄像机的一个关键优势是它们可以在低光条件下运行,而无需校准。它们也可以比立体RGB摄像机或大多数激光雷达单元更为实惠。然而,ToF摄像机的一个缺点是它们必须单独使用,因为它们的发射器可能会干扰附近的相机。此外,ToF摄像机在过于明亮的环境中也无法使用,因为环境光可能会冲刷掉发出的光源。
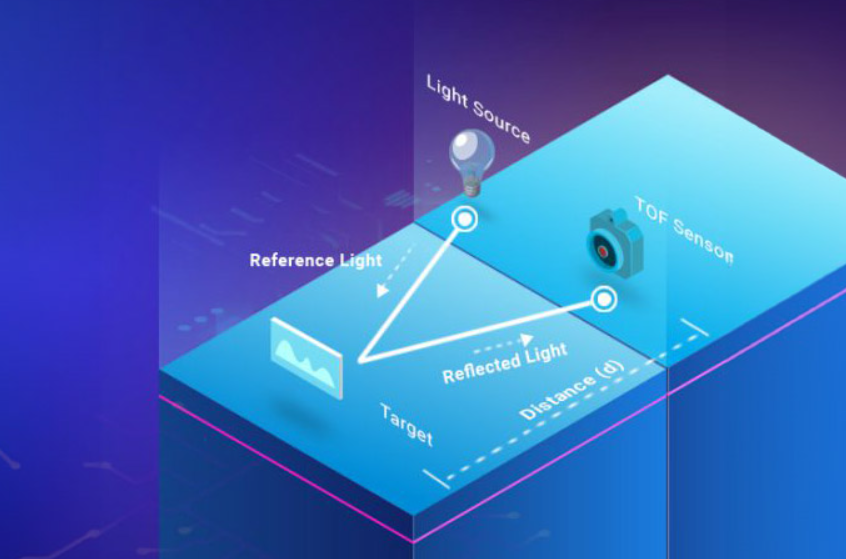
ToF传感器是一种利用飞行时间测量深度和距离的传感器,对于移动机器人的多个应用具有广泛的潜在用途。它们在仓库中的AMR/AGV应用中实现了本地化、映射、导航和里程计等功能。ToF技术使AMR在决定避免障碍物的路径之前能够以3D方式了解其环境。这种多功能的应用有望在依赖精确导航和互动的行业中发挥重要作用,为机器人技术的发展打开新的可能性。



