
空中物流系统是一种面向智能车间的物流模式,华中科技大学提出了一种空中穿梭车设计,包括结构设计和电控系统设计,以及中央调度控制系统。以下是对文中内容的主要总结:
1.空中物流系统总体设计:
1.1系统组成:
-空中物流系统包括空中执行系统、地面上下料系统、中央调度控制系统等。
-采用精准定位、自动抓取、自动接驳、调度控制等技术。
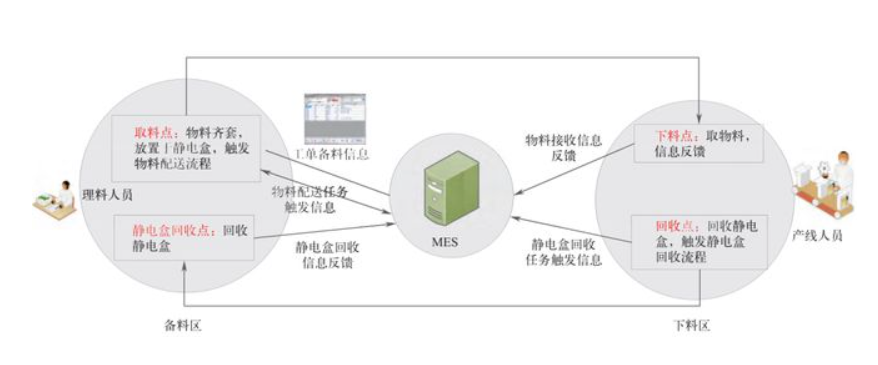
1.2物流系统业务流程:
1.MES与空中物流系统进行信息交互。
2.空中穿梭车自动配送,完成物料配送和尾料回收工作。
3.包括理料、抓取物料、配送、下料确认、生产活动、静电箱回收等步骤。
2.空中穿梭车设计:
2.1结构设计:
-空中穿梭车集成物料抓取、卷绕升降、行走三个物料流转动作。
-上半部分负责行走、升降、充电等功能,下半部分实现物料抓取、放置。

2.2电控系统设计:
-采用四个直流无刷电机,每个电机对应一个Elmo电机驱动器。
-电控系统实现电机驱动控制、电量检测、行走准确定位、升降限位、轨道安全检测、指令调度及状态反馈、车体故障报警等功能。
3.中央调度控制系统设计:
3.1空中穿梭车运行逻辑:
-采用两阶段调度策略:离线生成路径库,在线基于时间窗算法进行路径规划。
-解决穿梭车防碰撞问题,包括赶超冲突和路口冲突。
3.2智能调度策略:
-基于遗传算法、Dijkstra算法和时间窗算法,实现多台空中穿梭车无冲突运行,配送时间最小化。
-考虑穿梭车路径规划中的赶超冲突、路口冲突,采用多种方法解决。
4.结论:
-提出的空中物流系统以空中穿梭车为核心,具备多功能于一体的特点,适用于智能车间多品种小批量生产的物流需求。
-智能调度策略采用两阶段调度,离线生成路径库,在线进行路径规划,通过遗传算法优化多车系统的任务分配和路径选择。
这个设计方案旨在提高车间物流效率,降低物流成本,适应多品种小批量生产的需求。



