
在软体机器人的发展中自然界为我们提供了大量灵感。例如,人类的舌头、水母的触手以及含羞草的叶子等,这些源自自然界的生物和植物展现出了卓越的灵活变形能力和自我感知能力。为了模仿这些自然系统,研究者们结合软执行器和柔性传感器,成功开发出仿生软机器人。但目前仿生软机器人存在一个普遍的问题,大多数软机器人虽然能够进行形状的变换,却缺乏感知外部刺激和监测自身运动的能力。为了解决这一问题,研究者们采取了在软机器人中嵌入传感器的策略,但这无疑增加了设计和制造过程中的复杂性。因此,软机器人在与环境交互的应用中仍面临一定的阻碍。针对上述挑战,开发具有仿生多功能和自感知能力的软机器人已成为一个备受关注的研究方向。
▍背景介绍
刺激响应水凝胶是一类新型智能软材料,该材料可根据外部环境如温度、近红外光、pH值、湿度和电或磁场灵活变形。近红外响应水凝胶执行器由于其优越的空间和时间分辨率而备受瞩目。研究人员通过引入光热转换导电聚合物或导电纳米颗粒开发出自感知水凝胶致动器,如我们熟知的双层结构和均质体感水凝胶致动器。但它们在致动速度、传感特性和长期使用稳定性方面仍有待提高。
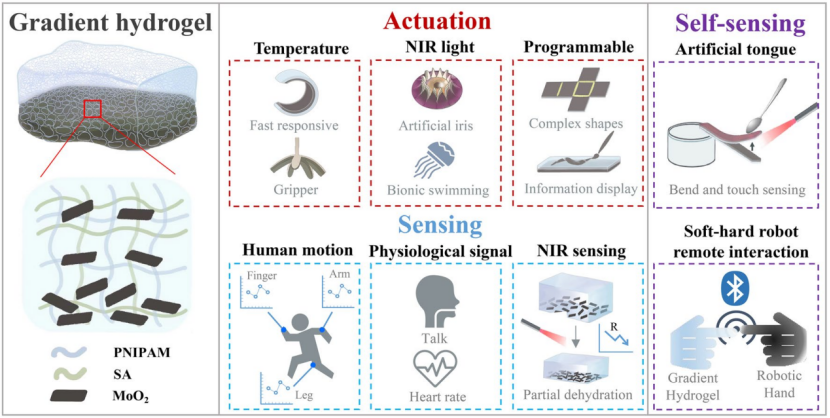
为此研究人员提出了一种基于润湿性的简便方法制备梯度水凝胶,实现超快驱动和高度传感,可用于软硬机器人远程交互。该方案通过引入二氧化钼纳米片引起润湿性差异,制备出具有优异光热效率和可编程变形的驱动梯度水凝胶。研究人员设计了光响应仿生软机器人,包括人造虹膜和水母,并实现了多种可编程变形。通过结合热刺激下PNIPAm基水凝胶的体积相变,实现了信息显示和隐藏。此外水凝胶表现出卓越的传感特性,具有高灵敏度、快速响应时间和循环稳定性等特性,为此团队成功实现了精确的人体运动检测(手指、手腕、手臂和腿)和生理信号检测(语音和心电图)。
此外,研究团队构建了第一个基于梯度水凝胶执行器和机械手的自感知远程交互系统,实现了软机器人和硬机器人之间的远程交互。这种仿生多功能自感知驱动梯度水凝胶为先进体感材料设计开辟了新途径,在软机器人、可穿戴电子产品和人机交互方面具有广泛应用前景。
▍论文亮点
1. 本工作提出了一种新型的多功能自感驱动梯度水凝胶,它结合了超快驱动和高灵敏度,用于与机械手的远程交互。
2.梯度网络结构是通过包括二氧化钼纳米片快速沉淀的润湿性差异方法实现的,在水凝胶的两侧之间引入了亲水性差异。这种独特的方法使水凝胶具有超快的热响应驱动和增强的光热效率。
3. 水凝胶表现出高灵敏度、快速响应时间和良好的循环稳定性。
4. 利用这些特殊特性,将水凝胶纳入各种软致动器中,包括软夹持器、人工虹膜和仿生水母,以及能够精确检测人体运动和生理信号的可穿戴电子设备。
▍研究成果
一、PSM水凝胶的制备和表征
PSM梯度|胶由SA、二氧化钼和热敏PNIPAm共聚而成。制备过程中,二氧化钼薄片迅速沉降至溶液底部,亲水NIPAM单体向上聚集,形成梯度结构。SEM图像显示,PSM水凝胶具有独特梯度网络结构,尺寸从5.71μm至21.94μm。
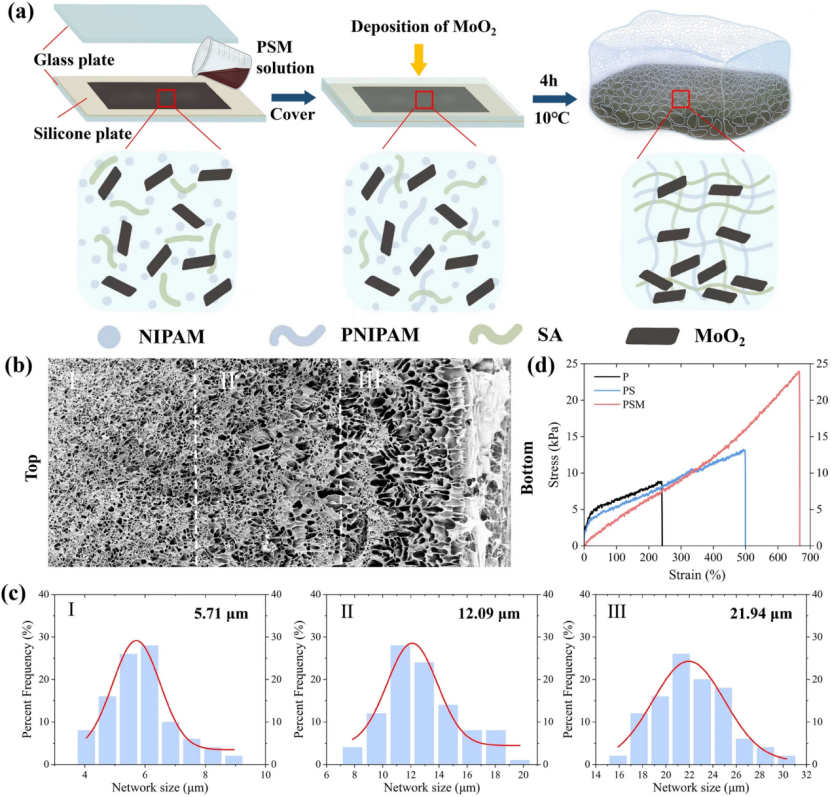
PSM水凝胶的合成和表征
此结构使水凝胶在外部刺激下产生不同程度收缩和变形。PSM水凝胶具有海藻酸盐和PNIPAm互穿网络,且SA和二氧化钼的引入提升了水凝胶的机械性能,特别是拉伸应变和应力性能。PSM0.6水凝胶的最佳断裂应变为666%,最佳断裂应力为23.9 kPa,使其具备超快驱动能力。
二、PSM水凝胶的热响应驱动
研究人员利用PSM水凝胶的不对称梯度结构,将PSM浸入氯化钙中制备超快热响应水凝胶执行器。通过测量水凝胶在50°C水中的弯曲角度评估驱动性能。氯化钙浸泡的PSM水凝胶弯曲成圆形,驱动性能超过大多数热敏水凝胶驱动器。其速度提高源于富含二氧化钼的水凝胶底部大网络尺寸,允许更大收缩并导致快速的热响应。
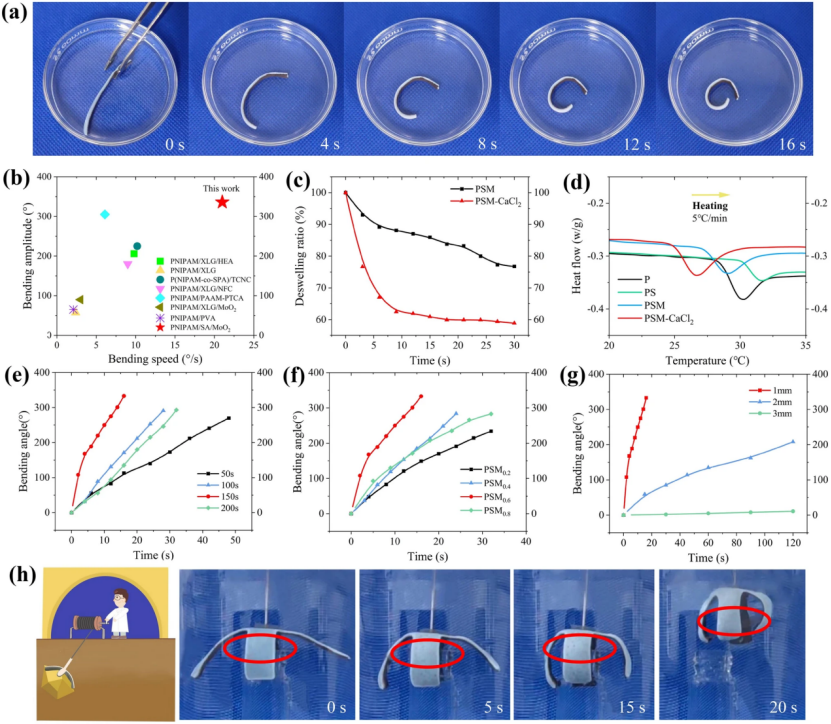
PSM 水凝胶的热响应驱动
驱动速度比无氯化钙浸泡的PSM水凝胶快3.4倍。氯化钙浸泡使水凝胶消溶胀速率增加,表明50℃时体积减小更加快速。引入氯化钙改变了水凝胶的体积相变温度,与纯PNIPAm水凝胶相比,PSM水凝胶具有较低的体积相转变温度(VPTT,volume phase transition temperature),氯化钙添加进一步降低VPTT,导致更快的响应速率。
研究人员找到了影响水凝胶执行器性能的关键因素,如氯化钙浸泡时间、二氧化钼含量和水凝胶厚度。PSM水凝胶的消溶胀速率受氯化钙浸泡时间影响,浸泡150秒的水凝胶弯曲速度最快。氯化钙浸泡200秒的PSM水凝胶弯曲速度降低,可能是由于过度交联导致杨氏模量增加。水凝胶中二氧化钼含量显著影响弯曲速度,PSM0.6水凝胶最快。增加二氧化钼含量至0.6g可提高弯曲速度,但过量(0.8g)会阻碍水凝胶网络,降低弯曲速度。水凝胶厚度也对驱动行为有影响,厚度增加会使弯曲速度降低。研究人员利用PSM水凝胶制造了仿生四臂抓手,能在50℃水中迅速抓住金属板。
三、PSM水凝胶的光响应驱动
由于二氧化钼的近红外光热效应,PSM水凝胶的温度会随着近红外光的照射而升高。近红外光照射10 s后,PSM水凝胶的温度可达到36.4 °C。此外,PSM水凝胶的温升速率随着激光功率密度的增加而增加,在近红外光照射10 秒内达到近3.7 °C s-1。因此,PSM梯度水凝胶表现出良好的光响应驱动,因为水凝胶可以在近红外光照射下短时间内实现最低共溶温度LCST(Lower Critical Solution Temperature)。
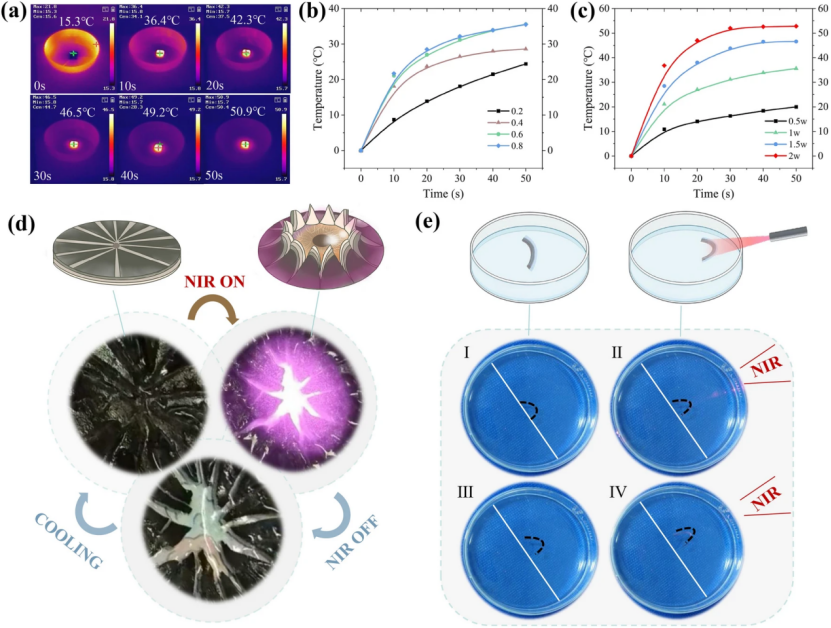
PSM 水凝胶的光响应驱动
利用光响应特性,研究人员成功制造了仿生人工虹膜,近红外光照射下虹膜张开,关闭近红外光后虹膜可以关闭。此外,驱动行为表现出良好的可回收性。受水母游泳启发,研发人员还开发了光响应软机器人,PSM梯度水凝胶受近红外光照射,因热收缩和变形游动,光关闭时溶解在水中恢复原状。循环开闭光,PSM水凝胶向光方向游动。
四、PSM水凝胶的可编程变形及信息显示
研究人员通过对钙离子进行图案化局部交联SA,制造可编程PSM水凝胶致动器,实现近红外光照射下的复杂变形。通过调整钙离子涂覆角度控制变形角度。顶面和底面涂层导致不同驱动方向。底面涂覆时水凝胶向下弯曲,顶面涂覆则向上弯曲。顶面和底面同时涂覆实现更复杂变形,如字符“Ω”。PSM水凝胶执行器能进行3D折叠运动。通过创建水凝胶并在折叠线处涂覆钙离子,实现自动折叠的封闭立方体。
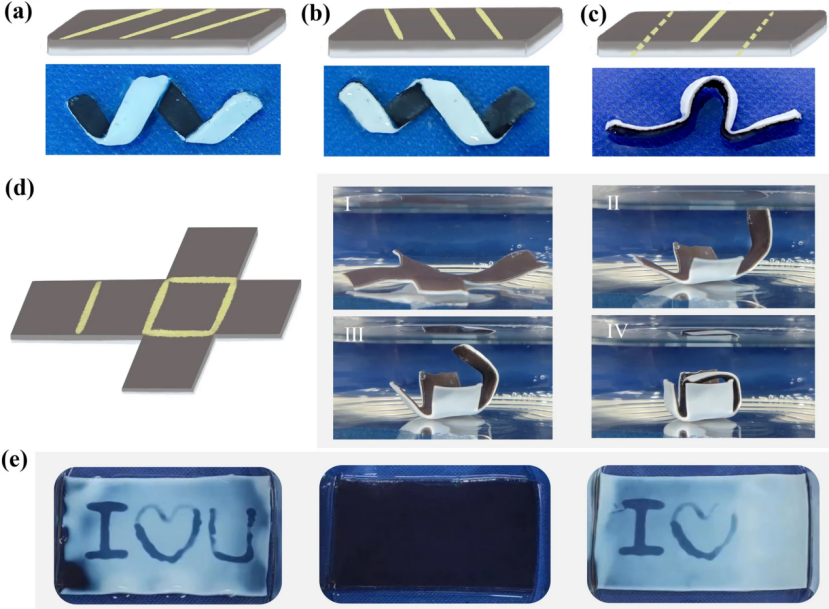
PSM水凝胶的可编程变形和信息显示
水凝胶可用于显示/隐藏信息。通过涂覆钙离子编码信息。热刺激使水凝胶从亲水性变为疏水性,显示“我爱你”信息。降低温度后,PSM水凝胶恢复亲水状态,恢复原来的透明外观,有效隐藏信息。EDTA溶液与钙离子配位反应可实现信息擦除,如字母“U”被擦除。
五、PSM水凝胶的传感性能
值得一提的是,PSM水凝胶还具备应变传感及光热传感能力,当水凝胶从原始状态拉伸到50%、100%、150%、200%、250%和300%时,PSM水凝胶的RRC逐渐增加,没有滞后现象,显示出可识别的及时响应。为了可视化电阻的变化,PSM水凝胶被用作闭合电路中的引线来点亮LED。此外,PSM水凝胶还具备光热响应传感特性,其电阻可通过近红外光快速稳定地改变。
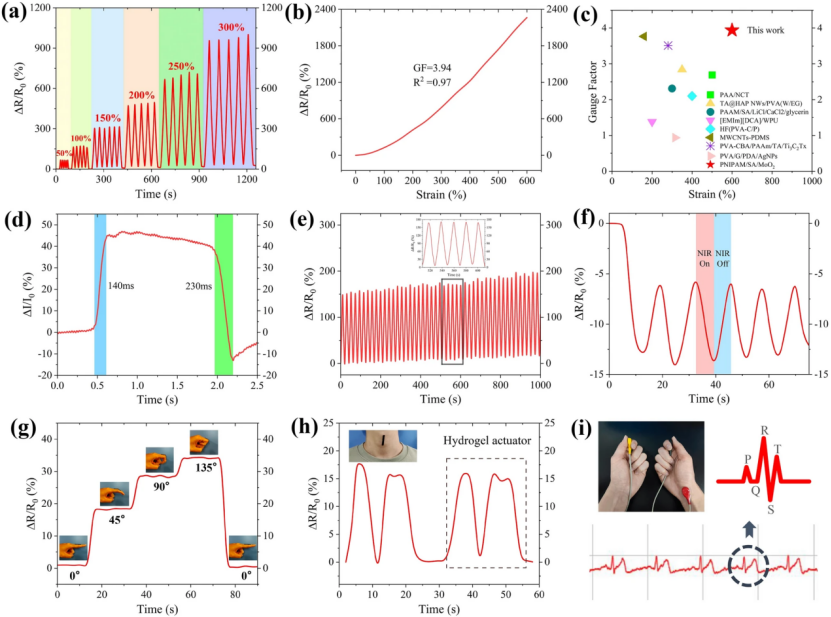
PSM水凝胶的传感性能
PSM水凝胶凭借独特的传感特性和高灵敏度,将PSM水凝胶附着在关节上,用于实时检测人体运动信号。在实际测试当中,水凝胶能实时监测手指角度从0°到135°的变化,并在手指迅速恢复0°时,快速回到初始状态,同样原理,可应用于手腕、手臂和腿部的运动检测。此外,将PSM水凝胶贴在喉咙上,可检测到微弱的生理信号。PSM水凝胶能捕捉到喉咙微振动产生的RRC,并能通过数字心电图采集模块,检测到连续的心电图信号,“PQRST”波形也能清晰显示在心电监护屏幕上,有助于疾病诊断。
六、PSM水凝胶的自感知和蓝牙交互
基于PSM水凝胶超快驱动和高灵敏度的特殊性能,团队开发了一种自感知仿生人工舌头,能在近红外刺激下感知触摸。无近红外光照时,人造舌头保持向下,PSM水凝胶电阻无变化。受近红外光照后,人造舌头迅速向上弯曲,PSM水凝胶电阻急剧下降。10秒后,人工舌头接触勺子,PSM水凝胶阻力缓慢下降。关闭近红外后,人造舌软化,PSM水凝胶电阻恢复初始值。这成功演示了PSM水凝胶弯曲和触摸自感知能力的实现。
软硬机器人远程交互系统
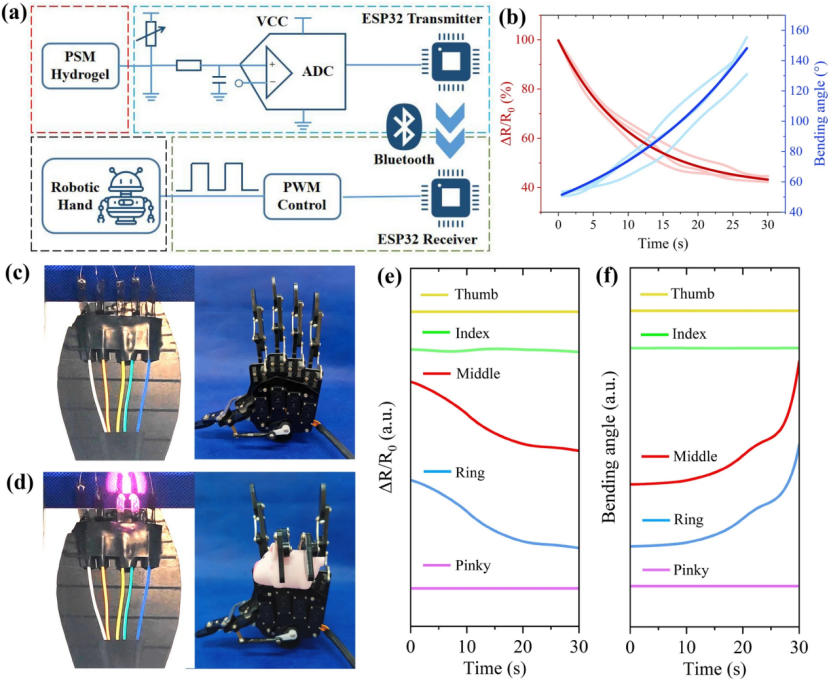
此外,通过利用物联网技术,研发人员实现软硬机器人远程交互功能。
该系统包括四部分组成:
(1)自感知近红外响应的PSM水凝胶;
(2)信号采集与传输;
(3)信号接收与控制;
(4)机械手控制终端。
自感应PSM水凝胶在近红外刺激后变形并产生电阻变化。之后ESP32芯片发射器捕获PSM水凝胶实时 变化的电压信号,并将其转换为数字信号。接下来,信号通过蓝牙模块远程传输至ESP32芯片接收器,并转换为机械手相应的弯曲角度。最后,伺服电机通过脉宽调制(PWM)驱动,驱动机械手弯曲,实现软硬机器人之间的远程交互。
▍研究结论:
总体来看,研究团队使用一种新颖的基于润湿性的策略制造了一种仿生自感知驱动梯度水凝胶,用于软机器人和硬机器人之间的远程交互。PSM水凝胶内润湿性的差异是由聚合过程中二氧化钼纳米片的沉积引起的,导致梯度水凝胶的形成。所提出的PSM水凝胶表现出超快的驱动特性,在50°C水中显示出超快的弯曲速率,在808 nm NIR下在2W下显示出良好的光热效率。该水凝胶不仅可用于作为快速抓取的抓手,也可制成软机器人,包括人造虹膜和仿生水母。
此外,PSM水凝胶可以被编程为使用Ca 2+图案来驱动和显示信息。该水凝胶还具有卓越的灵敏度,包括高拉伸性、快速响应时间和可重复稳定性。PSM水凝胶被用作人体运动和生理信号检测的传感器。结合驱动和传感特性,研究团队研发了一种自感知仿生舌头。此外,PSM水凝胶还能与物联网结合,量化软执行器的运动轨迹,实现近红外刺激响应的远程控制系统——智能自感知软机器人——蓝牙交互机械手。
综上所述,论文中提出了一种新型高效的高性能多功能自感知驱动梯度水凝胶的制备方法,为下一代智能交互式体感软材料的开发铺平了道路。
第一作者:He Liu
通讯作者:Ye Tian,Xiaoyu Cui
通讯单位:东北大学
论文下载地址:https://link.springer.com/content/pdf/10.1007/s40820-023-01287-z.pdf
----------------END-------------------
工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 节卡机器人 | 珞石机器人 | 法奥机器人 | 非夕科技 | CGXi长广溪智造 | 大族机器人 | 越疆机器人 | 睿尔曼智能 | 优艾智合机器人 | 阿童木机器人 | 盈连科技
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®️机器人 | 罗森博特 | 磅客策 | 柏惠维康
人形机器人企业
优必选科技 | 宇树 | 达闼机器人 | 云深处 | 理工华汇 | 傅利叶智能 | 逐际动力 | 乐聚机器人 | 星动纪元
核心零部件企业
绿的谐波 | 因时机器人 | 脉塔智能 | 伟景智能 | 锐驰智光 | 地平线 | 本末科技 | NOKOV度量科技 | 青瞳视觉 | 因克斯 | 蓝点触控
教育机器人企业
硅步机器人 | 大象机器人 | 中科深谷 | 史河科教机器人
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募, 添加微信“robospeak2018”入群!
兼职作者&投稿
机器人大讲堂正在招募【兼职内容创作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可将简历和原创作品投至邮箱:liuzk@leaderobot.com
我们对职业、所在地等没有要求,欢迎朋友们的加入!


看累了吗?戳一下“在看”支持我们吧



