
随着人工智能和机器人技术的迅猛发展,机器人学中功能操控的重要性变得愈发显著。为迎合机器人对复杂操控任务的需求,加州大学伯克利分校的智能机器人实验室(RAIL)研究团队成功提出了新一代的操控基准——FMB(Functional Manipulation Benchmark for Generalizable Robotic Learning)。
FMB的特点:
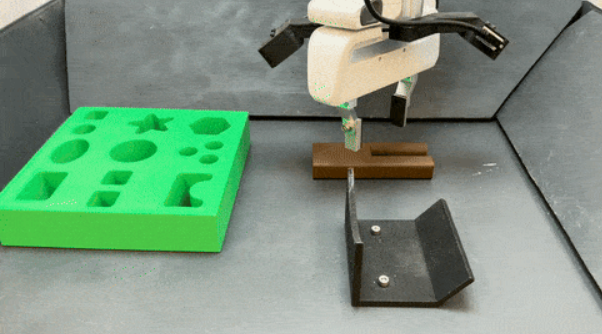
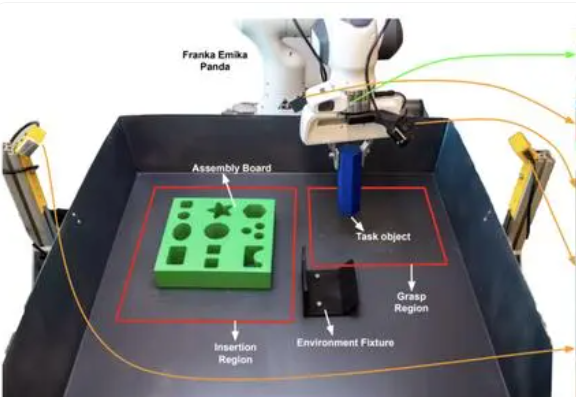
创新设计与多样化任务:采用3D打印技术制作任务中的物体,考验机器人泛化能力,同时涵盖单物体和多物体多阶段操控任务,真实模拟日常环境中的挑战。
大型数据集:通过大量人工演示,为机器人提供了丰富的数据集,其中包含超过两万个操作轨迹,以四个不同摄像机记录,从而提供深度、RGB、深度信息和力/扭矩信息。
模仿学习基线:采用最先进的机器学习方法,提供基线结果和模块化组件,有助于其他研究者在此基础上进一步开展研究。
创新实验展示技术优势
FMB通过抓取、装配等任务设计灵活多变,要求机器人不仅完成单一操控技能,还需将这些技能组合完成复杂多步骤任务。研究团队通过深度信息和力/扭矩信息的融合,提高了机器人在抓取和装配任务中的性能。
在多步骤任务中,传统的单一学习过程易因单一环节错误而累积误差,导致整个任务失败。为解决此问题,团队引入分层控制策略,将任务分解为小块,降低了错误累积风险,使得机器人能够更灵活地应对任务复杂性。
FMB的前瞻意义
FMB的发布标志着机器人学习领域的技术创新,为开发先进机器人学习方法提供了全面易得的框架。该基准为研究人员提供了丰富数据、有挑战性的实际任务,以及易于复制的实验设置,有助于对机器人学习过程进行深入分析。
研究团队期待FMB能够成为机器人学习领域的重要参考,为未来的研究提供新的方向。他们相信,通过这一基准的引领,机器人学习将不断推动技术创新,为机器人在复杂任务中实现更高水平的功能操控能力打开新的可能性。详细信息可在FMB项目主页和论文中获取。



