
今天,全国两会如火如荼地进行中,同时我们也即将迎来“三八”国际妇女节。机器人大讲堂特设专题,向女性科技工作者致敬,聚焦全国政协委员、中国科学院院士乔红女士。
乔红院士在人工智能和机器人技术领域深耕多年,她的团队提出构建包含视觉认知、决策、运动控制和肌肉骨骼结构的受人启发机器人系统(即通过对人体行为、肌肉骨骼系统和神经机制的借鉴和应用,使普通机器人实现高性能)。今天一起来看她的故事↓

▍夯实核心技术 加快培育新质生产力
过去一年中,乔红院士深入全国10余个省市区进行调研,发现关键核心技术对于原创性、颠覆性科技创新成果能否及时应用于产业至关重要。今年两会,乔红委员将围绕夯实关键核心技术、加快打通国家高水平学术—技术—产业协同机制等议题提出具体建议。
近日,乔红院士亲赴中关村机器人产业创新中心进行实地调研,进一步完善今年两会提案的内容。该创新中心成立三年来,已成功吸引30余家机器人企业及研发中心入驻,其中包括立德机器人平台(机器人大讲堂)。
通过实地走访和深入调研,乔红委员观察到,尽管机器人产业拥有广阔的市场前景,但要加快形成新质生产力,必须构建高水平的学术、技术、产业协同机制,以提升产学研融合水平。作为多模态人工智能系统全国重点实验室主任,乔红委员长期致力于机器人技术攻关,同时高度关注上下游产业链在科技创新过程中所面临的共性问题。去年全国两会,乔红委员针对创新成果转化落地过程中存在的痛点和堵点,在提案中提出两个共融,也得到了相关部委的积极回应。

▍开启机器人研究全新领域,回国贡献巾帼力量
乔红院士出身于书香门第,自幼便对机械充满热爱。1989年,她自西安交通大学计算机科学与技术专业研究生毕业后,前往英国深造,并在2002年获得英国曼切斯特大学的永久教职,担任博士生导师。
乔红院士在机器人操作领域的突出贡献之一是提出了“环境吸引域“,在国际上受到高度赞誉,被誉为“乔的概念”。
乔红院士曾回忆道:‘环境吸引域’是我经过长期的研究和探索之后的突破性发现。”在1999年的一次实验中,她意外地发现,即使未开启机器人的传感器,机器人依然能够成功完成轴孔装配操作。这启发了她思考,是否可以不依赖外部传感器,让机器人模仿人类的某些功能,实现精准操作。
这样的思考带领她首次提出了机器人操作中“环境吸引域”的概念。乔红院士解释道:“以豆子放入碗中为例,无论从哪个角度放入,豆子最终都会因重力作用沿着碗滑到碗底。类似地,在机器人的构型空间中,也存在这样的‘碗’。只要机器人能够控制接触点,便能在环境的约束下,从一个大致的位置准确到达目标位置。”
经过大量的实验和研究,乔红院士和她的团队逐步揭示了产生“吸引域”的条件,并将这一原理广泛应用于机器人装配、抓取和定位操作中。
这一创新性的理论为乔红院士后续的研究开辟了新的道路。她曾表示,在自己的国土取得成就,让她感到更加踏实和满足。因此,她毅然回国,带领团队投身于机器人科研事业。 “我们国家正处于发展壮大的关键历史时期。学有所成后报效祖国,是一个中国人的责任,也是一种荣幸。”
乔红院士坚信,解决产业瓶颈是她前进的动力。面对具身智能的浪潮,她与团队致力于在这场科技革命中提升我国机器人的综合实力,让我国的机器人走在世界前沿。

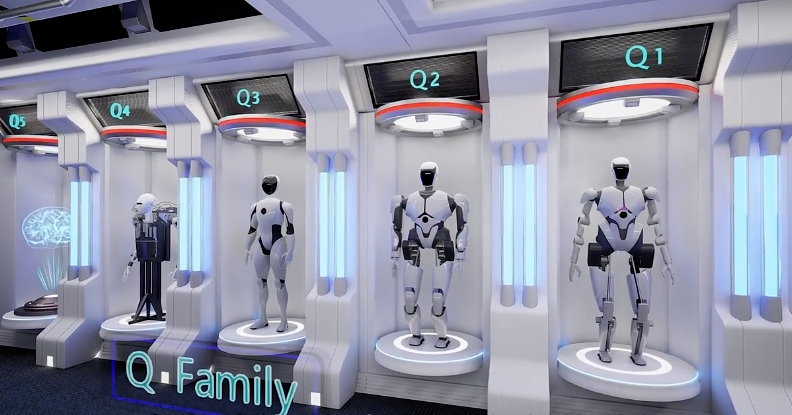
▍谱系化人形机器人Q家族
不久前,乔红院士带领的中国科学院自动化研究所人形机器人攻关团队发布了谱系化人形机器人Q家族。这一研究以国家航天、制造产业等重大需求为导向,基于“环境吸引域”高精度作业和类脑智能机器人理论等原始创新积累,初步实现了面向不同场景的技术验证。
团队在核心技术上取得了重大突破,包括高爆发一体化关节、AI赋能设计、机器人大模型、类人柔顺控制等方面。
他们研制的人形机器人设计组装“大工厂”能够融合智能、机构、部件、控制和决策等单元技术,快速生成各类人形机器人系统。
这一创新为形成人形机器人技术标准和产业化奠定了基础,并为机器人在人类难以到达的环境中实现自生产、自构建、自进化提供了可能。
“大工厂”根据不同需求,通过人工智能赋能设计,构建了多款人形机器人。仿生高动态机器人Q1实现了全身姿态准确跟踪与平衡控制。在视频中,机器人能够自如地执行诸如射箭、倒水、手机充电等对精准度要求高的动作.

多地形适应机器人Q2能在室内外复杂地形中自适应与稳定运动。

高爆发运动机器人Q3则具备批量化鲁棒控制与不同环境适应能力,适用于农田作业、野外巡逻等场景。

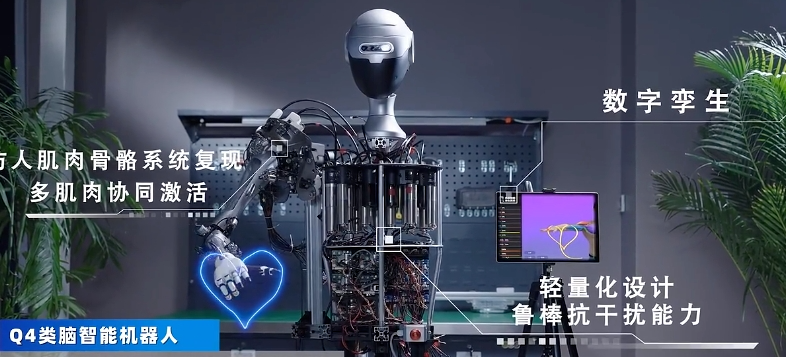
此外,为探索人类运动特性和精准操作机理,团队还研发了类人形机器人Q4,实现了高柔顺、高精度运动,为构建机理上模拟人、性能上超越人的新一代人形机器人奠定了基础。
同时,为了满足人形机器人在室内场景的智能化需求,“大工厂”还融入了紫东太初多模态大模型,构建了高并发推理人形机器人Q5。这款机器人能够快速、准确地进行逻辑推理和执行,为智慧工厂作业、家庭生活服务提供有力支持。

▍类脑机器人研发前景广阔
去年八月,乔红院士在人民日报上撰写文章,深入探讨了类脑机器人研发的巨大前景。她指出,类脑智能机器人正是从人类思考、行为的源头出发,基于神经科学对影响人类作业、运动、感认知和决策等关键生物机理的研究,通过信息建模和机器人软硬件系统的融合,构建出的一种新型机器人系统。这种机器人系统在外形、控制和智能等方面均实现了对传统机器人的突破,能够执行一系列以往难以胜任的新任务,引领机器人领域的深刻变革。
从技术发展角度看,类脑智能机器人是跨学科深度交叉融合的产物,需要持续的研究和投入。在我国,我们应充分利用人工智能和机器人应用的广泛基础、社会的高度认可以及人才储备的雄厚优势,构建科学与技术相融合的类脑智能机器人人才队伍。这不仅能保障我国机器人领域的前瞻性和实用性,还能推动我们实现技术引领和超越。
从技术安全角度来看,类脑智能机器人通过模拟人的内部机制,进一步缩小了与人的差距,使得人机交互更为自然,也更容易与人工智能大模型相结合。然而,这也带来了人机交互安全、用户数据安全等新的挑战。因此,我们需要在算法设计、实现和应用等各个环节加强透明性、可解释性和可靠性的审核评估,同时在数据收集、存储和使用等环节确保安全性,从而为类脑智能机器人技术设置安全防线。
随着多学科深度交叉融合的推进,类脑智能机器人正展现出突破现有技术瓶颈的巨大潜力,其发展前景令人期待。我国科研工作者在这条道路上不断创新,成果丰硕。未来也将更进一步,力争形成技术引领,为国家重大需求服务,为人类福祉做出贡献。



