
两栖机器人以其在复杂水陆混合环境中的卓越适应性而脱颖而出,成为非结构化场景下信息监测、资源勘探和灾难救援等多元化任务的理想选择。凭借能够在水生和陆生环境中自如切换的优势,两栖机器人在如上任务执行过程中展现出对多变环境的惊人适应能力。
在两栖机器人的领域中,刚体两栖机器人与软体两栖机器人各自占据一席之地。刚体两栖机器人以其坚固的结构和稳定的性能,能够在一定程度上适应不同的环境。
而软体两栖机器人则凭借其能够主动或被动地根据周围环境调整自身形态更好适应各种复杂地形环境,以及具有固有柔顺性的独特优势,在任务执行中展现出高效率,在生态敏感区域应用中表现出高潜力。这些优势也进一步使得软体两栖机器人成为两栖机器人领域的研究热点。
但同时,软体两栖机器人在实现高机动性和多地形适应能力方面仍然面临巨大挑战。
前不久,来自北京大学工学院谢广明教授团队的研究人员受果蝇幼虫和海蛞蝓独特的运动模式启发,提出了一种基于塑料片增强的薄膜气动驱动器的软体两栖机器人。
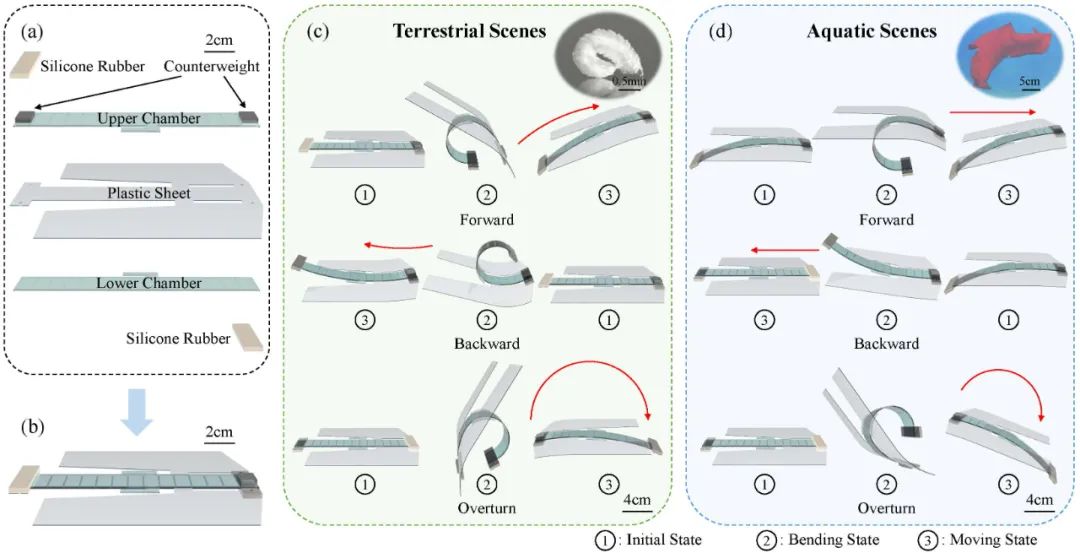
图1. 软体两栖机器人的设计及运动原理
该软体两栖机器人具有超强多地形适应能力,不仅可适应斜坡、障碍、台阶、泥地、沙地和砾石等多种地形,还具备多种运动模态,可在陆地和水生环境中自如执行前进、后退、转弯、自翻等丰富动作。同时,该机器人在高机动性方面也取得了显著成果,跳跃速度最高可达1.77BL/s,游泳速度最高可达0.69BL/s,相较于此前报道的软体两栖机器人,其速度更快。
图2. IEEE Transactions on Robotics发表页面截图
近日,该研究成果的相关论文以“Multimodal Soft Amphibious Robots Using Simple Plastic-Sheet-Reinforced Thin Pneumatic Actuators”为题发表在《IEEE Transactions on Robotics》杂志上。博士生吴家汐为第一作者,博士生武明信、博士生陈雯慧和北京大学软件工程国家工程研究中心副研究员王晨为共同作者,谢广明教授为通讯作者。该研究得到了国家自然科学基金委和北京市自然科学基金委的经费资助。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍灵感借鉴
果蝇幼虫和海蛞蝓,两种看似普通的生物,却都拥有着独特的运动方式。
果蝇幼虫通常采用缓慢的爬行运动作为其主要运动方式,但当面临威胁时,它们往往能凭借惊人的跳跃能力迅速逃离。这种逃生技巧主要得益于它们特殊的身体结构和运动机制:将身体蜷缩成环形,并收紧肌肉以积累弹性能量。当这些能量释放时,它们的身体就像弹射器一样被推向空中。这一堪与专业跳高运动员一较高下的跳跃能力,为它们提供了一条高效的逃生路径。
海洋生物的运动机制与陆地生物迥异,其中软体动物的移动方式尤其多样化。以海蛞蝓为例,这种生物通过摆动其身体并波动其侧幔来推进自己前进。如果暂时不考虑它们的侧幔,海蛞蝓的游泳动作可被概括为一系列身体弯曲与恢复的循环动作,这种交替模式赋予了它们在水世界中的灵活游动能力。
从这两种生物的运动方式中汲取灵感,研究人员设计了一种具有主体和两个侧鳍的软体两栖机器人。该机器人模仿了果蝇幼虫的跳跃机制和海蛞蝓的游泳方式。在陆地上,它主要通过无腿跳跃来实现快速移动;而在水中,它则通过身体的周期性弯曲和恢复来推动自身。这种设计使得软体两栖机器人能够在多种环境中高效、灵活地移动,展现了其在高机动性和多地形适应能力方面的巨大潜力。
▍系统设计
这款机器人的运动核心是由四层薄型气动执行器组成的驱动系统。这些执行器被巧妙地安排在两个独立的密封腔室中。正是这两个腔室的协同作用使得机器人能够执行快速弯曲和恢复的动作。
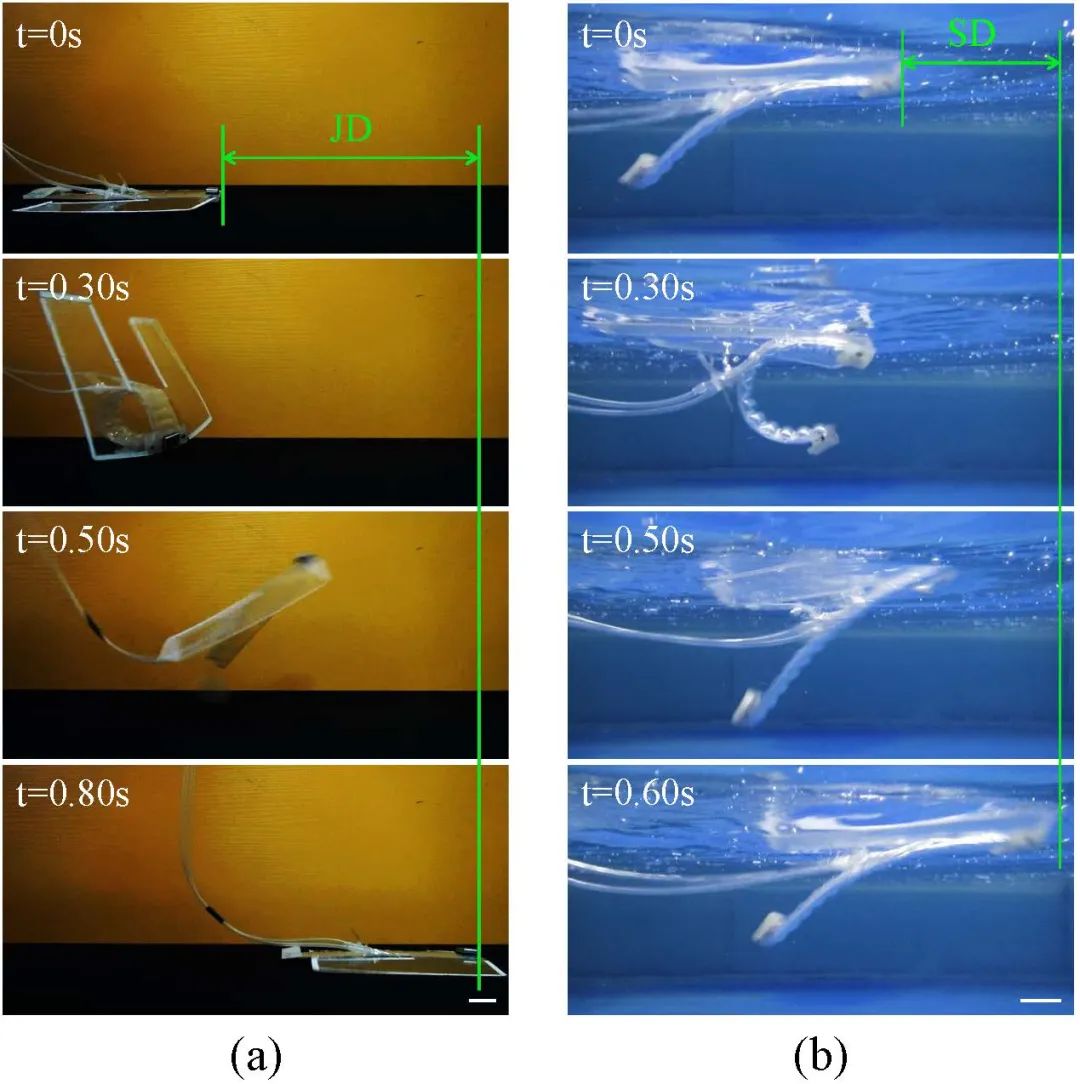
图3. 软体两栖机器人陆地和水中运动
同时,通过对果蝇幼虫弯曲状态进行观察,研究人员发现凭借尾部曲率大于头部曲率的独特结构,果蝇幼虫保证了向前的跳跃运动。借鉴这一自然智慧,研究人员在机器人设计中加入了一对侧鳍,以用来限制机器人头部弯曲,这一设计细节确保了在身体弯曲时,机器人能够尾部与地面充分接触,从而帮助其实现更稳定地向前跳跃。
为了简化结构,研究人员将侧鳍与嵌入主体中的塑料片进行了一体化集成。这样的结构简化不仅增强了机器人的整体性,还提升了其运动的稳定性。在双侧鳍的协同下,机器人可产生有效的向前推进力,表现出稳健的向前游泳能力。
▍薄型气动执行器制作
软体两栖机器人的核心组件薄型气动执行器,由热塑性薄膜和不可拉伸塑料片精心构建,并借助3D打印技术制造而成。这一制造过程不仅确保了执行器的精度和快速生产,还提供了高度的可重复性。
每个执行器包含四层热塑性薄膜,这些薄膜巧妙地分层组合,形成了两个功能性气室。这两个气室在机器人的运动中协同工作,使得机器人能够迅速弯曲并在需要时恢复原状,从而支持机器人进行多种复杂的运动模式。这种设计赋予了机器人极高的灵活性和适应性,使其能够在不同环境中实现高效的移动和操作。
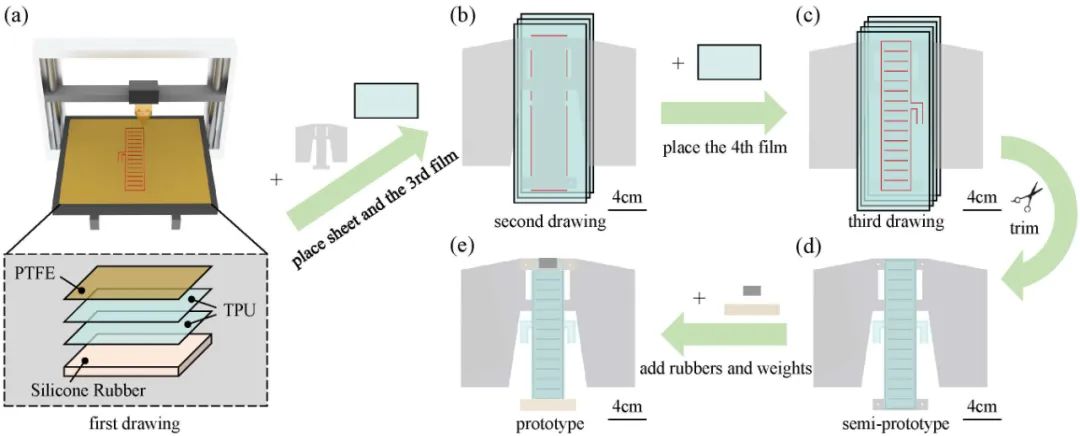
图4. 软体两栖机器人的制作流程
与其他研究中使用的薄型气动执行器不同,本研究中,研究人员对传统设计进行了改进。通过在两个腔室之间嵌入一片不可拉伸的塑料片研究人员实现了对执行器弯曲形态的限制,并显著提升了机器人的输出扭矩。更为关键的是,同时,这片塑料片可以在机器人身体弯曲时能够储存能量,一旦释放,这些能量将有助于机器人在随后身体展平时实现更远的跳跃距离。
这种将柔软薄膜与半刚性塑料片相结合的设计理念,为机器人提供了执行连续跳跃和游动所需的灵活性与强度。通过身体交替的弯曲和展平动作,该机器人在陆地上实现了最高移动速度1.77BL/s,而在水中则达到了最高游动速度0.69BL/s,其性能均超越了现有的软体两栖机器人。
▍性能展示
通过精心设计驱动器内各气室的操控时序,该机器人不仅能向前移动,还能高效地执行后退和自我翻转动作。这项技术显著增强了机器人在未知或复杂环境中的勘探能力。尤其值得一提的是机器人的自我翻转功能,这在软体机器人领域尚属罕见。即便在失去外部帮助的情况下,该机器人也有能力从跌倒的状态中自行恢复,并继续完成其既定任务。
此外,通过将两个基础驱动器单元利用内嵌的塑料连接片并行联结,机器人获得了灵敏的转向功能。机器人能够通过预先使身体侧边蜷曲,实现在陆地上高达111.8°/s的最大旋转速度,这一表现超越了目前已知的软体两栖机器人的机动性。
除了高机动性外,该机器人还展现出对多种地形的适应能力。机器人能攀登斜坡、跨越障碍物、爬升台阶,并且能够采用蠕动方式穿行于狭窄的缝隙中。更令人印象深刻的是,无论是在玻璃、木板、地毯等不同摩擦系数的表面,还是在沙地、泥泞和砾石等更具挑战性的环境,该机器人均能在统一的控制时序下保持稳定的运动性能,无需对不同的地面条件进行特别的调整或设置。

图5. 多地形适应能力

图6. 多种地面条件适应能力
通过在跳跃和游泳两种步态之间的迅速切换,该机器人还可以实现从陆地到水中的无缝过渡,成功克服软体两栖机器人领域长期以来面临的重大挑战。这种能力使其在多样化的环境中展现出卓越的适应性和连续性,为类似机器人的设计和功能实现提供了宝贵的参考。
通过将两个驱动器单元并联配置,研究人员还证明了机器人不仅可以保持基本单元的定向运动特性,同时可以获得敏捷转向能力,进而巧妙地避开难以逾越的障碍。此外,得益于其浮力调节机制,该机器人还能够在水下与水面状态间自如切换,极大地扩展了其在不同水域环境中的活动边界。
参考文章:
https://ieeexplore.ieee.org/document/10418499



