
一只彻底释放天性的机械狗正在屋子一路狂飙:
双腿叉开,后腿蹬着疯跑,活脱脱就是一只玩疯了的小狗!
第一眼,它不会一头撞墙上吧。
第二眼,嗯?障碍物全都躲过去了,还挺敏捷!

这只兼顾速度与安全的机械狗使用了一个名为 「敏捷但安全」(ABS,Agile But Safe)的新框架,由卡内基梅隆大学(CMU)和苏黎世联邦理工学院(ETH)的研究团队联合研发。它不仅能高效的避免碰撞,还在运动速度上达到了3.1 米/秒!
▍各种场景下的高速避障能力
在高速机器人运动领域,实现同时兼顾速度和安全一直是一大挑战。机械狗要么为了安全放弃了速度(<1m/s),要么提高速度却增加了安全隐患。
ABS (Agile But Safe)框架是两全其美的解决方案,这种算法兼具了在障碍中执行敏捷运动技能的敏捷策略和防止故障的恢复策略,能够实现高速和无碰撞运动。
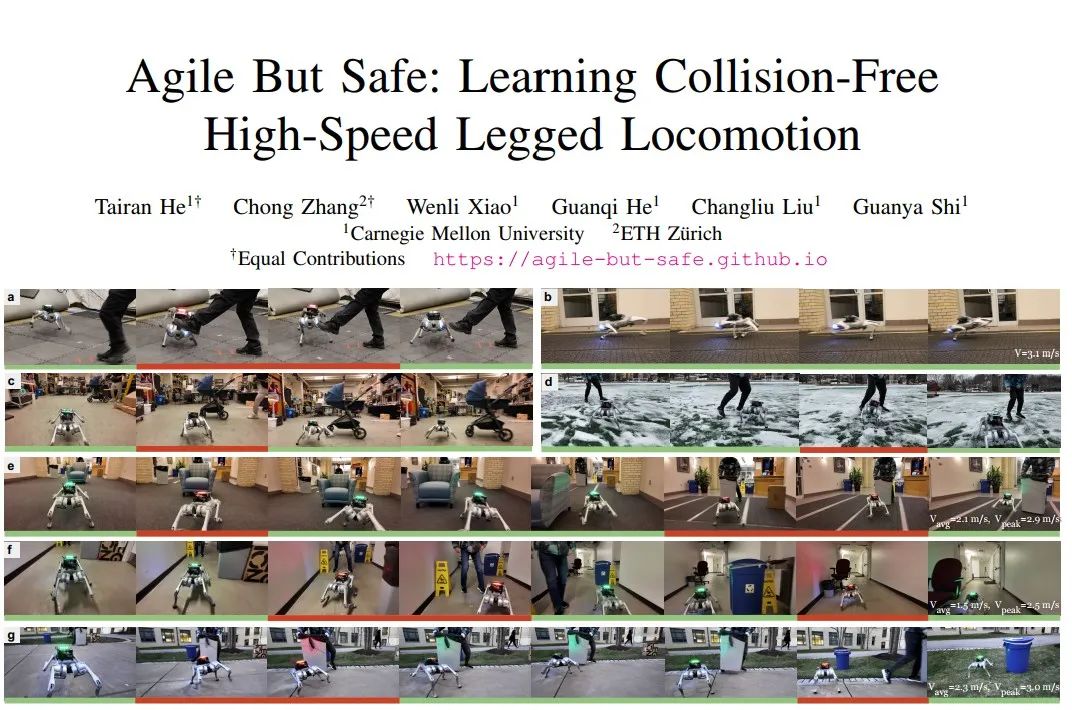
有了ABS的加持,机械狗能在各种复杂环境中“释放天性”,高速奔跑的同时,还能巧妙地避开障碍,真正做到了“敏捷但安全”!
在凌乱的室内客厅,能够躲避沙发和垃圾桶(平均速度2.1米/s,最快2.9米/s):

遇到突然出现的婴儿车也能从容应对:
在障碍重重的狭窄走廊(平均速度1.5米/s,最快2.5米/s):

在室外水泥或雪地环境中躲避突然出现的障碍,也都不在话下(平均速度2.3米/s,最快3.0米/s):

▍ABS框架-算法流程
ABS(Agile But Safe)框架共包含4个训练模块,核心是一个双策略机制:
敏捷策略:让机器人能灵活地快速移动
恢复策略:避免与障碍物碰撞
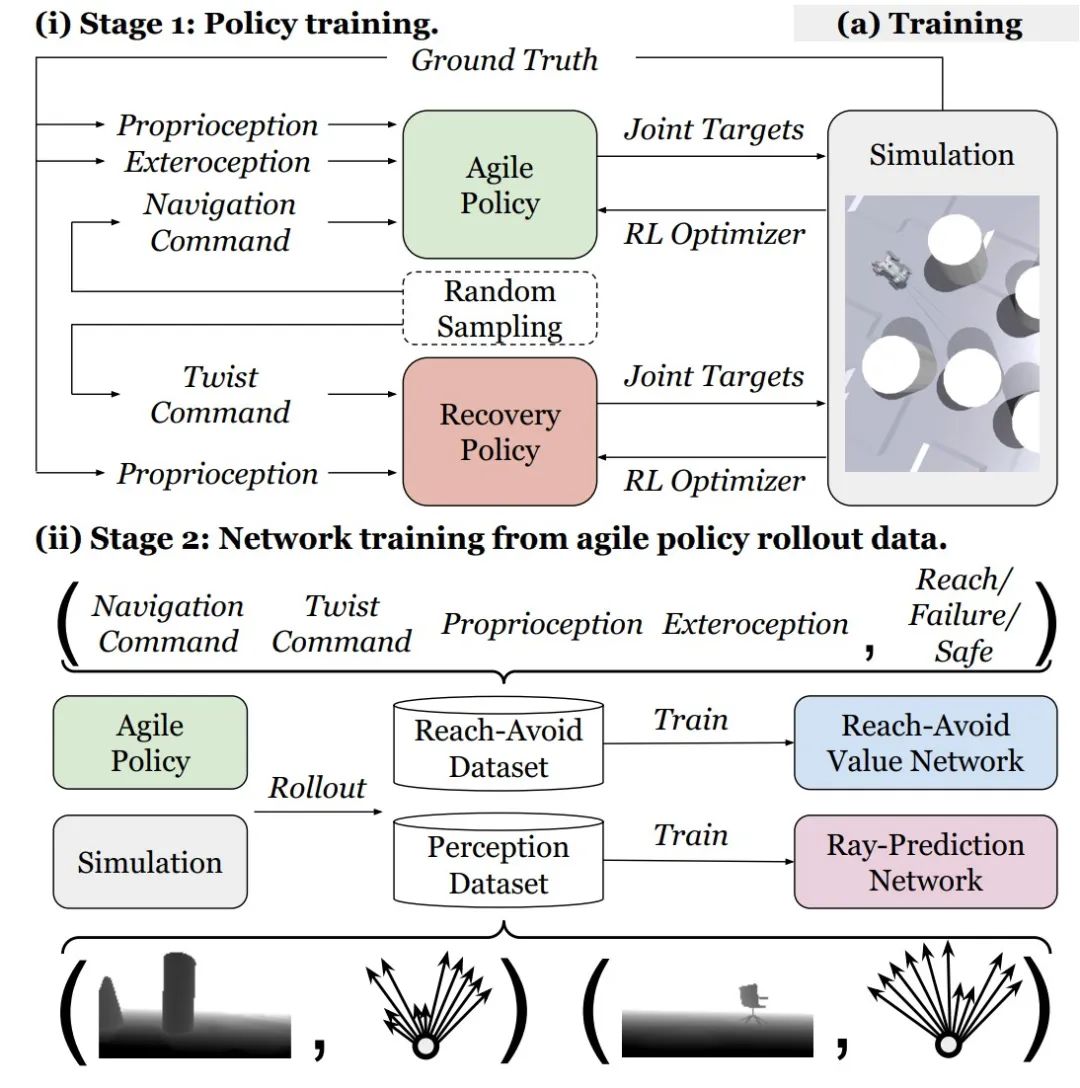
ABS中的策略切换由“Reach-Avoid Value网络”控制,当机器人在敏捷策略下快速移动时,一旦 “Reach-Avoid Value网络”检测到潜在危险(比如突然出现的婴儿车),就会切换到恢复策略,让机器人快速避障;该网络也作为目标函数指导恢复策略,从而在闭环中保护机器人。
除此之外,ABS还包括一个“光线预测网络”,被训练来预测机械狗与障碍物之间的光线距离,作为给定深度图像的策略的外部输入。
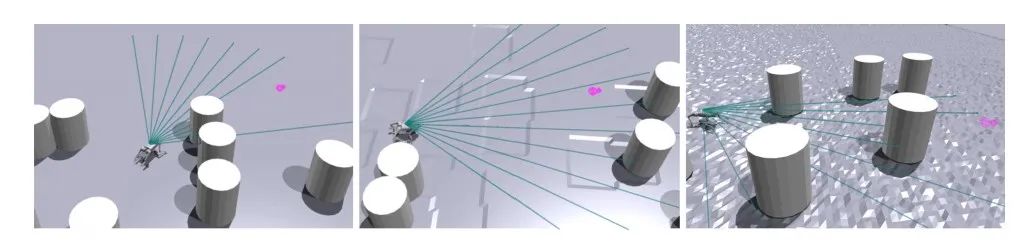
在训练时,将本体感觉、外部感觉、随机采样到的导航命令输入敏捷策略与恢复策略模块中,该模块输出相应的执行目标,并驱动四足机器人在仿真环境中进行运行。
基于“Reach-Avoid Value网络”的估计值可以用来在敏捷策略和恢复策略之间执行切换,过程如下:
1.通过状态评估模块获取到四足机器人的本体感觉;
2.通过射线预测网络来获得四足机器人的外部感觉;
3.将导航命令、本体感觉和外部感觉同时输入到Reach Avoid Value 网络中,从而获得预测的RA值;
如果RA的估计值<阈值,则激活敏捷策略;如果估计值≥阈值,则激活恢复策略。并综合这两种策略来驱动PD控制模块来驱动四足机器人执行运动。
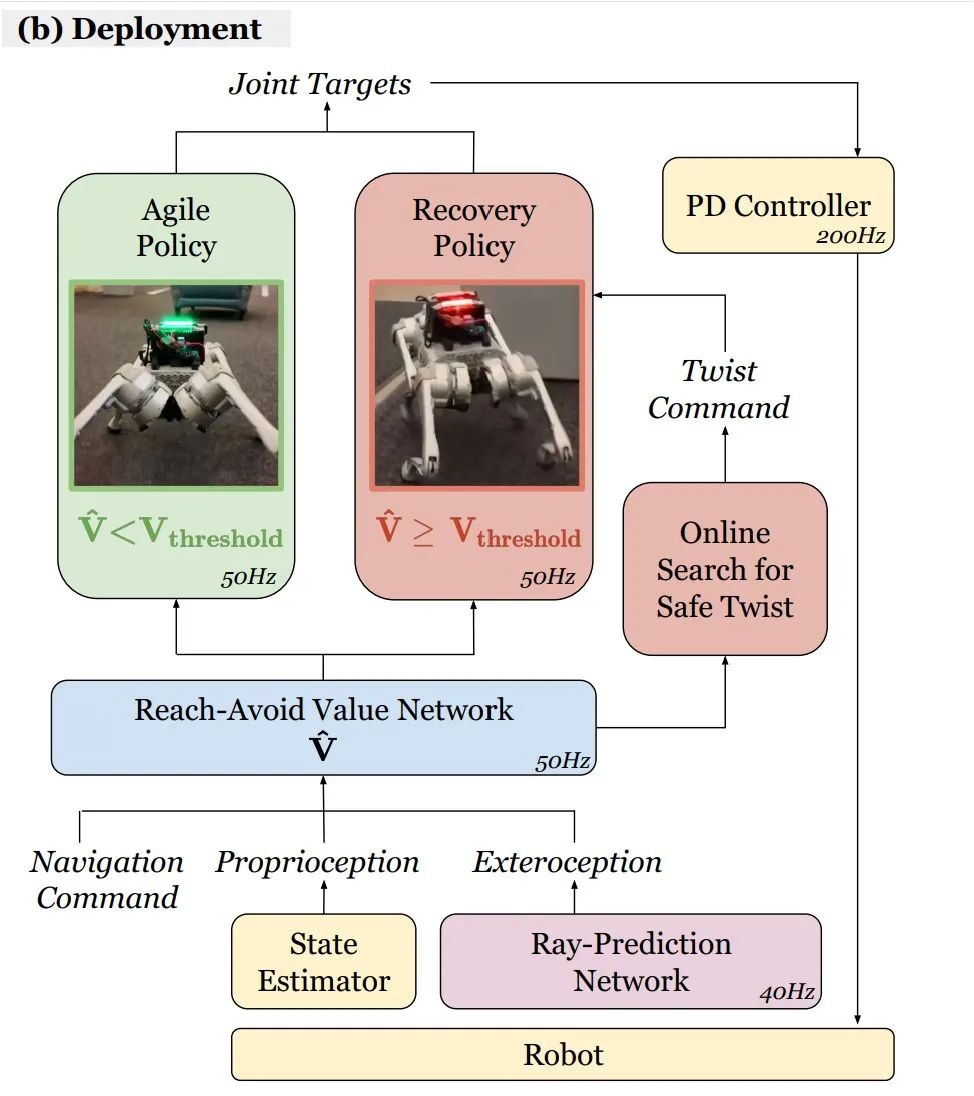
这些训练好的模块可以直接在现实世界中进行部署,通过机载感知和计算,在有静态和动态障碍物的室内和室外空间实现高速和无碰撞导航。
▍突破性框架ABS的绝招是什么?
讲完了ABS的算法流程,那它在训练策略时都采用了哪些突破性技术呢?
首先,敏捷策略与以往简单速度跟踪指令不同,它采用目标达成(goal-reaching)的方法来最大化机器人的敏捷性。“速度跟踪”即在开阔平坦的地形上跟踪速度命令。然而,在杂乱的环境中为这些速度跟踪策略设计导航规划器并不容易。为了确保安全,不得不保守设计策略,无法充分发挥运动的灵活性。
相反,敏捷策略能够训练机器人发展出感知运动技能,可在没有碰撞的情况下达到指定目标。通过追求基座高速度的奖励条件,机器人自然学会在避免碰撞的同时实现最大敏捷性。这种方法克服了传统速度追策略在复杂环境中可能的保守限制,有效提高了机器人在障碍环境中的速度和安全性。Agile Policy 在实机测试速度达到了 3.1m/s!

恢复策略与敏捷策略不同,它不需要外部的感知信息输入,它的任务奖励专注于线性速度追踪、角速度追踪、保持存活和保持姿势,以便平滑切换回敏捷策略。
作为双策略的中间人,切换策略——Reach-Avoid Value网络最主要的功能就是预测故障。
研究人员采用了无模型强化学习,它比传统基于模型方法更适合预测故障。此方法不是学习全局 RA 值,而是使其依赖于特定策略,这样可以更好地预测敏捷策略的失败。通过简化的观测集,RA 值网络可以有效地概括并预测安全风险。

ABS框架
只使用敏捷策略

LAG算法
▍开发团队介绍
这项研究由卡内基梅隆大学(CMU)和苏黎世联邦理工学院(ETH)联合研发,标题为“Agile But Safe: Learning Collision-Free High-Speed Legged Locomotion(敏捷但安全:学习无碰撞高速腿式运动)”。

团队成员包括 Tairan He, Chong Zhang, Wenli Xiao, Guanqi He, Changliu Liu 和 Guanya Shi。
研究的第一作者何泰然(Tairan He)是卡内基梅隆大学机器人实验室的博士生,研究方向是开发具有智能性、通用性、敏捷性和安全性的智能机器人,本科毕业于上海交通大学。

ABS框架让机械狗拥有了前所未有的敏捷性和非凡的避免碰撞的能力,不仅在机器人技术领域取得了重大突破,更开启了四足机器人新的应用可能,并为人类与机器间更安全高效的合作增加了保障。

这项技术的成功展示了四足机器人在高速移动和安全避障领域的巨大潜力。未来,这种高速且安全的四足机器人有望在搜救、探险甚至是家庭服务等多个领域发挥重要作用。



