
提到三足机器人你是否第一时间会联想到飘在空中的巨大外星人,在乌云密布电闪雷鸣的环境下移动着狭长的躯体。不过最近密歇根大学的一项研究有可能会颠覆你对三足机器人的认知。

《怪奇物语2》异世界怪物入侵剧照
密歇根大学的研发团队近期成功研发了一款名为SKOOTR的三足滑冰机器人,该机器人能在复杂多变的环境中稳定移动,不用担心翻转。

三足机器人臆想3D图像
研究人员在arXiv服务器上传了该研究文章,详细介绍了这款机器人的设计原理与性能表现。经过实际测试,SKOOTR展现出的稳定性比传统三足机器人更为卓越,这主要归功于其独特的球状设计方式。
▍灵感来源于万向轮座椅 兼顾移动能力和稳定性
据悉该实验室主要设计开源机器人平台,而平台的灵感往往来源于生物学原理。论文作者Talia Y. Moore表示,SKOOTR机器人起源于一个很偶然的发现,在学生小组讨论方案的时候,他发现学生所坐的办公椅搭载的万向轮可以轻松转向任何方向,而学生的双腿则为办公椅提供动力,同时办公椅也能在运动当中保持稳定。这与海洋当中的海蛇尾在游泳时改变方向相类似。
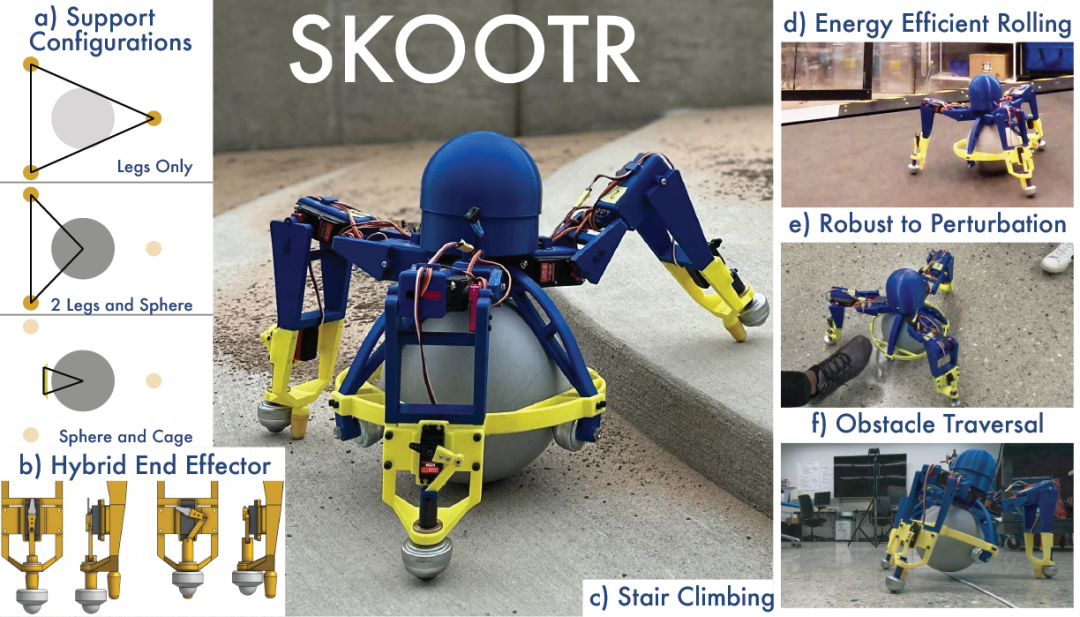
SKOOTR机器人甚至能够完成上楼梯操作
为了能够将球形机器人的可操作性与腿式机器人的稳定性相结合,产生类似于海星或者蜘蛛网一样的径向对称结构,让机器人能够轻松改变方向,就需要一种全新的运动形式。为此团队其中一位成员Adam Hung对此提出了自己的想法。
▍SKOOTR机器人由一个球体和三条机械腿构成
Adam Hung使用了一台3D打印机设计并制作了这台SKOOTR原型机,这台机器人由三条机械腿与中间的一个大球体共同组成,被动旋转的球体顶部是一个中心枢纽,里面装有支持机器人运行的所有电子设备,三条机械腿从中心枢纽中伸出。每条腿都有两个关节,分别控制弯曲和伸展,其顶端还有一个混合接触模式。

SKOOTR机器人能够实现弧度转弯与急转操作
在动力输出方面,SKOOTR三足机器人使用伺服系统在被动滚动脚轮和抓地橡胶腿之间进行切换。
足式集成了被动滚动脚轮和抓地橡胶腿
SKOOTR三足机器人并非采用集成化设计,研究人员表示,为了满足不同使用场景需要,SKOOTR中间的球体是可以进行替换的,如中空的球体内部可以放置物品,提供运输功能,此外,中心配重球体的轻重也一定程度上影响了机器人的运动速度以及稳定性。
▍想要让SKOOTR在运动中发生翻转几乎是不可能的事情
SKOOTR机器人的稳定性得益于其独特的中央球体和支腿设计。该研究团队表示,SKOOTR机器人已经做过大量测试,它在运行过程中几乎不可能发生翻转,它的能力也远远超出你从'滑步'步态上所能想象的。通过用腿将球体抬起,SKOOTR机器人可以克服其他滚动机器人难以克服的障碍。令人惊讶的是,SKOOTR机器人还具备爬楼梯的能力。未来,这种机器人可以在现实环境中使用和测试,以探索其应对不同任务的能力。

SKOOTR机器人运动状态演示
负责人表示,目前团队正在更多地探索机器人径向对称性的潜在优势,并着力于开发全新的运动模式,近日团队再次扩容,邀请到一位神经科学家加入,他对利用SKOOTR来增进对章鱼的理解表现出浓厚的兴趣。

SKOOTR机器人进行实地测试
如果未来这款SKOOTR三足机器人能够进行商业化量产,你能想象到它最适合哪种落地的应用场景吗?不妨在下面评论区留言,谈谈你对这款机器人的看法。
论文下载地址:
https://arxiv.org/pdf/2402.04374.pdf



