
随着工业4.0的深化推进及人工智能技术的蓬勃发展,移动机器人已经从实验室走进社会生产,活跃在生产制造、物流配送、医疗护理等各种前沿场景中。要想让这些机器人像人类一样,在错综复杂的环境中自由穿梭、自主决策,就必须依赖于机器人自主导航技术。
机器人自主导航技术为机器人在复杂且充满变数的环境中实现智能化、自主移动奠定了基础,但在实践中却面临一系列严峻挑战:如软硬件一体化设计难度大、耗时长,因环境复杂导致定位精度降低,尤其在缺乏GPS信号的大型场景中难以实现长期稳定的精确定位。另外,跨场景的通用适应性和无缝切换能力也是阻碍其广泛应用的核心问题。
史河机器人,作为一家专注于推进户外移动机器人及复合型机器人在广泛领域应用的国家高新技术企业,依托多年积累的移动机器人和自主导航技术研发与应用经验,倾力打造了一套独具创新的自主导航技术解决方案。这一方案集成了场景地图构建、多源传感器融合定位与自主路径规划三大核心模块,可快速实现移动机器人在多样化的环境中实现高精度、高稳定性的自主导航,助力用户解决精度低、不稳定、不通用、不便捷等限制移动机器人发挥更大效用的难题。
▍产品、技术自主研发,助力用户提效降本
移动机器人本体与自主导航系统常常因为接口兼容性差、通用性不好而造成应用集成开发难度大、成本高、周期长等问题,这要求最终用户在机器人集成、开发、环境感知、运动控制、算法等方面有充足的技术积累以及对应的人才资源,或者就需要通过第三方集成公司来完成系统集成及功能开发工作。这无疑会让最终用户付出更高昂的购买成本、学习成本以及使用成本。

史河科教机器人作为专业的移动机器人&复合机器人研发、生产厂家,对此种行业困境早有体悟。因此,史河机器人基于自研室外移动机器人和复合机器人开发了行业级的自主导航技术。该技术可适配公司多个系列的机器人产品,从核心的操作平台到具体的功能实现,均展现出了无缝适配的强大实力。

MR2000户外移动机器人行走于农田
毫无疑问,这可以助力终端用户预先整合并开发移动机器人主体及其导航解决方案,从而有效规避因兼容性欠佳和通用性低下而导致的高昂集成与开发成本问题。另外,针对不同应用场景,用户可灵活选用适宜的移动平台,确保机器人在高效完成任务的同时,有效降低成本消耗。此举不仅能有力提升用户在各类型场景下的部署效率,快速实现机器人的自主移动功能,更能实质性地帮助用户节省使用成本。

MR600室内外移动机器人行走于公园
▍多模态融合技术提升移动机器人环境感知能力
史河自主导航技术方案在场景地图构建环节采用多传感器融合环境感知技术,且算法历经多次迭代和优化。这犹如赋予机器人一双明察秋毫的眼睛,使其能把各类应用场景的环境信息都能处理得清晰、细腻,提升了移动机器人对各类环境的感知能力,并最终让机器人能游刃有余地完成任务。

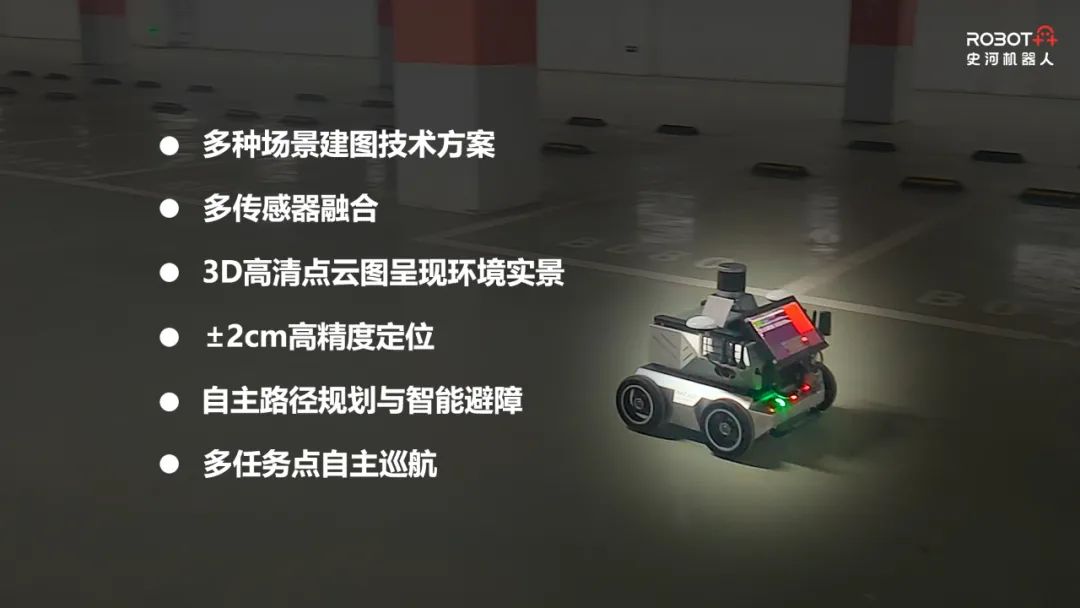
具体来说,史河自主导航系统通过集成3D激光雷达、RTK-GPS及IMU等多种传感器,形成一套精密且强大的环境感知网络。3D激光雷达如同机器人的“立体视觉”,细致刻画出三维空间环境,实现精准定位和路径规划;RTK-GPS则提供户外广阔区域内的厘米级定位精度,弥补了激光雷达在远距离定位方面的不足;而IMU通过与激光雷达数据融合确保了高精度定位与建图的可靠性。这一系列深度融合的技术手段,共同构建起一道坚实的安全屏障,确保机器人在复杂环境下能稳健、精准地执行任务。
封闭场景—地下停车场定位效果
▍适配多类场景,拓宽移动机器人应用边界
史河机器人自主导航技术方案涵盖了封闭场景、半封闭场景以及开放场景,多源融合的技术方案使移动机器人在各种场景下都能实现更高的自主性、高效性、通用性,犹如一个“全能型”感知处理器,能够即时捕捉并重建局部环境的空间结构和物体细节,为移动操作机器人系统提供了准确无误的认知环境信息,从而有力地支撑了机器人在复杂环境下的自主导航、智能避障的能力,真正意义上拓宽了移动机器人的应用边界。
封闭场景—地下停车场建图效果
如在开放场景中(户外农田、公园、景区)等地,史河机器人自主导航技术方案展现了广泛的适应性和强大的技术底蕴。采用高性能的RTK-GPS集成定位系统,辅以3D激光雷达和摄像头组成的多传感器融合技术,使得机器人在广阔、无明显地标参照的环境中依然能够实现±2厘米级的定位精度,从而能使机器人更好地适应不同场景下的不同环境条件。同时,利用先进的目标检测和跟踪算法,机器人能够对动态障碍物进行实时识别和合理避障,确保在复杂多变的开放场景中始终保持高效、安全的自主导航能力。
20000㎡开阔场景建图效果
史河机器人自主导航技术方案的核心竞争力在于其“全能型”感知处理器的设计理念。通过实时融合处理来自各类传感器的海量数据,机器人如同拥有了无比敏锐的触角和大脑,能够即时捕捉并精细重建周遭环境的每一个角落和细部特征,形成详尽而准确的环境认知模型。这一强大的环境感知与理解能力,使得移动机器人能够灵活应对各类复杂环境,有效突破传统应用领域的局限,真正意义上拓宽了移动机器人在物流运输、安防巡逻、环境保护等多行业、多场景下的应用边界。
开放场景—公园场景建图效果
相信随着史河机器人自主导航技术的不断演进和完善,未来移动机器人将在更多复杂、多元的场景中发挥重要作用,为人类生活与社会发展创造无限可能!
史河机器人(合肥)有限公司
www. robotplusplus.com.cn
安徽省合肥市瑶海区红光街道滨河路与幸福南路交口中国网谷5号楼9层
如需咨询企业合作事宜,欢迎联系堂博士(13810423387,手机与微信同号)进行对接。



