
香港科技大学的工程师与机器人专家团队近日公布了一项电子复眼设计的重大突破,该设计赋予机器人以高效、经济的方式实现集群功能。
这一创新的设计理念及其在实际飞行机器人中的效果,已被详细记录在《科学机器人》杂志的论文中。传统的机器人视觉系统多依赖于高成本的标准相机概念,即通过高分辨率镜头捕捉图像,但这种方法的成本对于广泛应用而言过高。为了降低这一成本,香港科技大学的团队借鉴了昆虫的复眼结构,尝试为机器人打造类似的视觉系统。
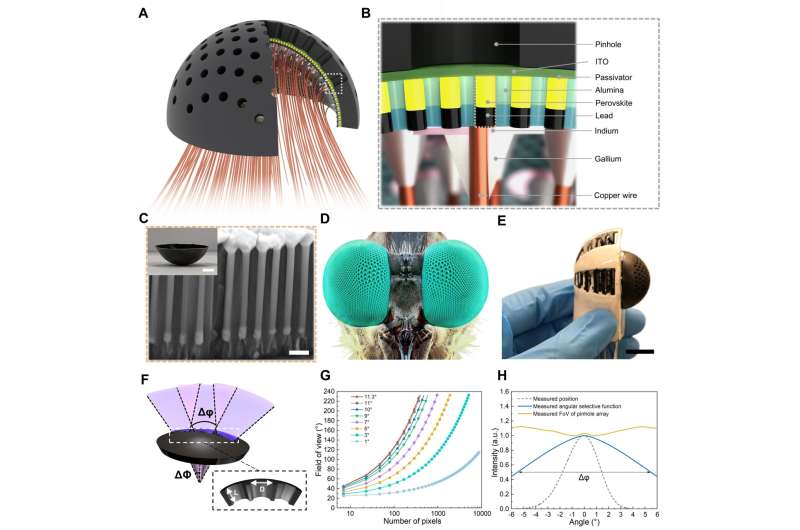
复眼,顾名思义,是由众多小镜片组成的半球形结构,昆虫通过它获得广阔的视野。然而,将这一原理应用到电子眼上并非易事,主要挑战在于如何将平面透镜有效地固定在曲面上。幸运的是,香港团队找到了一个全新的解决方案。
他们从一个塑料半球开始,在表面钻出多个小孔,使光线能够穿透。随后,使用钙钛矿纳米线填充这些孔洞,将光线引导至独立的光传感器上。这些光传感器随后与中央处理器相连,以昆虫眼睛的方式将捕获的图像片段拼接成一幅完整的图像。
研究人员表示,这种设计不仅大大降低了成本,还使得机器人在某些应用中能够使用廉价的电子眼。更重要的是,该设计提供了140度的宽阔视野,当与另一只同类型的眼睛配合使用时,视野更是扩大至220度。
为了验证这一设计的实用性,团队在一架飞行无人机上安装了这对复眼,并成功用于跟踪四足步行机器人的运动。他们相信,这种设计在成群的飞行机器人或自动驾驶汽车等领域具有巨大的应用潜力。



