
科学家们最近研发了一款名为LORIS的四足仿生机器人,它在攀爬能力上取得了突破性的进展。这款机器人采用了一种创新的机制,能够牢牢地附着在粗糙的垂直表面上,这一机制不仅高效,而且设计相对简洁。
与依赖吸力来攀爬光滑表面的实验机器人不同,LORIS的攀爬技术在面对岩石等无法形成密封的粗糙表面时,展现出了无与伦比的优势。
在攀爬技术的研发中,为机器人装备微棘抓手是一种常见的解决方案。它通过微小的尖钩钩住攀爬表面的小角落和缝隙来实现抓握。然而,传统的微棘抓手在应对不规则表面,尤其是当表面形状复杂多变时,存在局限性。
为了克服这些限制,LORIS采用了主动微棘抓手的设计,结合了电动执行器,使钩子能够有目的地沉入表面,从而实现更稳固的抓握。与此同时,通过机载深度感应摄像头和微处理器的协同工作,LORIS能够精准地控制其四条腿的运动,确保在攀爬过程中保持稳定的附着状态。
LORIS的设计灵感来源于有袋动物,这款机器人由卡内基梅隆大学机器人力学实验室的保罗·纳丹、斯宾塞·巴克斯、亚伦·M·约翰逊及其同事共同研发。
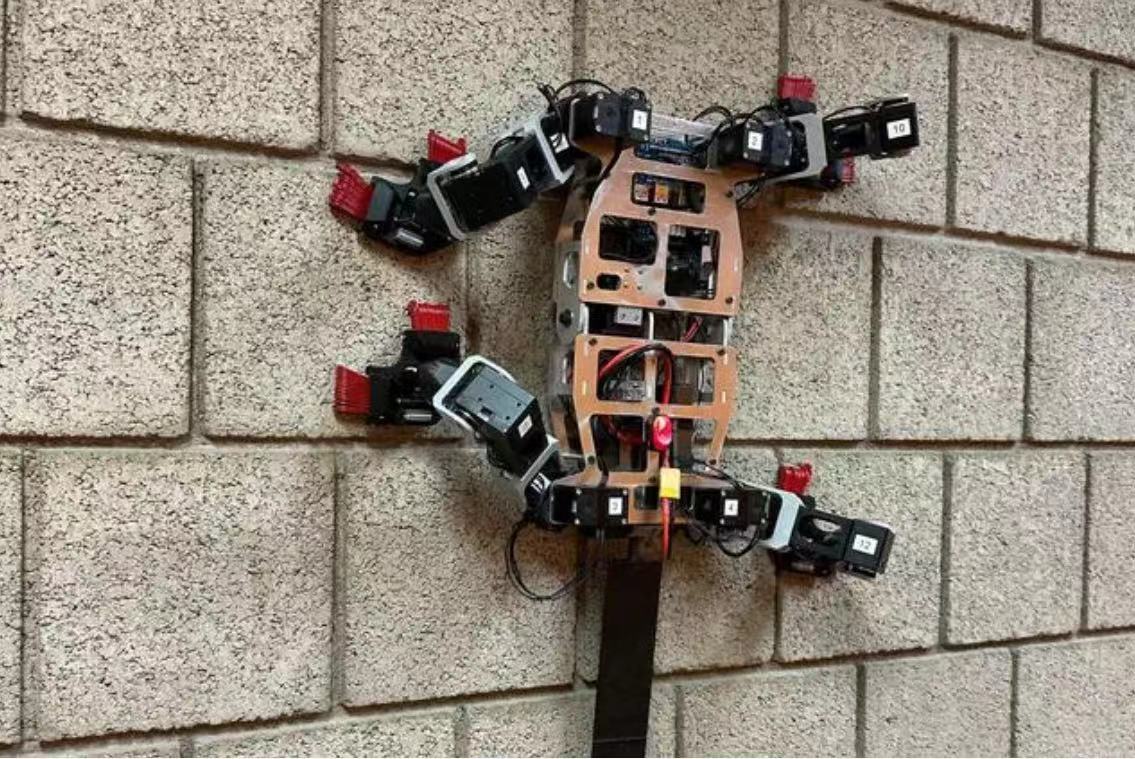
在机器人的每个腿末端,都装备了一个张开的微棘爪,它包含两组呈直角排列的棘。这些棘被封装在3D打印的塑料体内,每个棘都由一个鱼钩形状的结构组成。微棘爪通过被动腕关节与腿部相连,这意味着它们会根据腿部的动作自然地摆动。
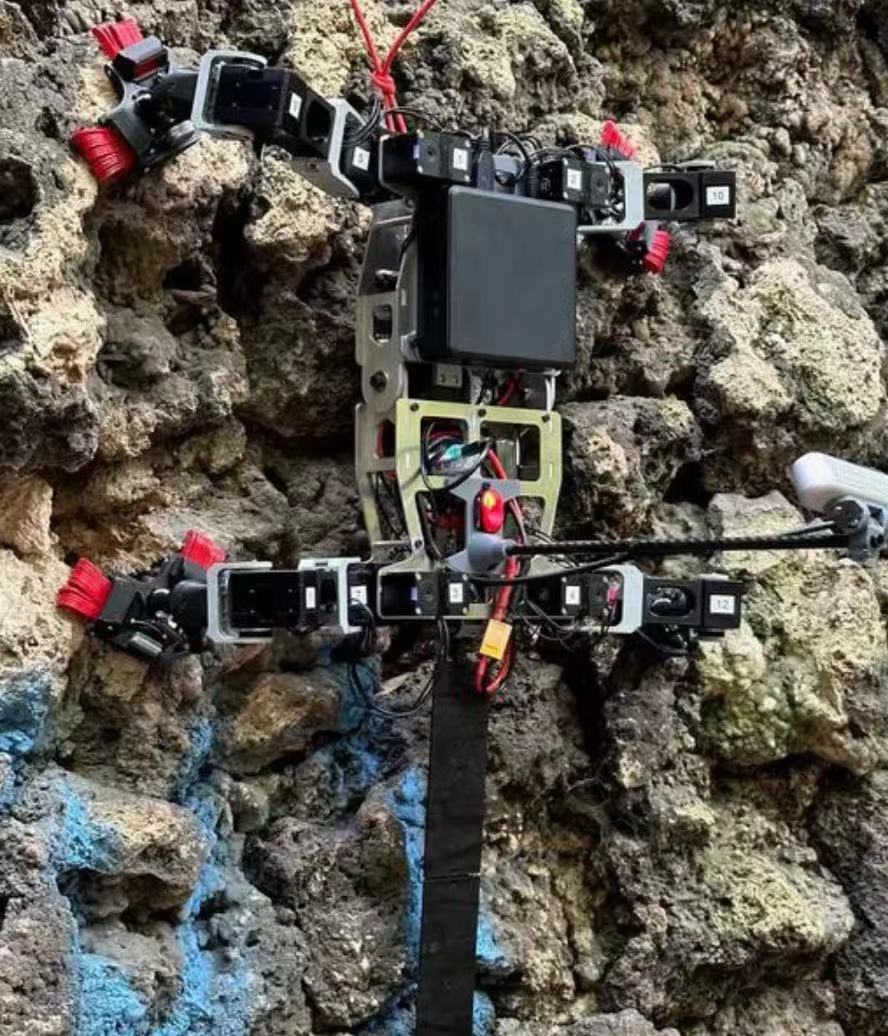
LORIS的攀爬策略受到了昆虫的启发,称为定向向内抓取(DIG)。在攀爬过程中,当一条腿上的夹子抓住攀爬表面时,身体另一侧的另一条腿上的夹子也会同时这样做。通过保持对角线来维持腿上的夹持器向内的张力,使机器人能够牢牢地附着在表面上。同时,另外两条相对的腿则可以自由地向上迈出下一步。
研究人员表示,LORIS结合了被动微棘爪的轻量、快速、节能和简单性,以及主动爪的牢固抓握和适应性。此外,这款机器人的设计和制造过程简单且成本效益高,为未来的机器人攀爬技术的研发提供了宝贵的经验和思路。
值得一提的是,LORIS是与NASA合作开发的,或许这款机器人的出色攀爬能力,将能为未来的太空探索任务提供强有力的支持。



