
在自然灾害频发的地球上,人类时刻面临着自然灾害的威胁。每年约有六万人因地震、洪水等灾害丧生,受影响的人口高达上亿。而这些灾害通常不是孤立发生,通常会引发一系列衍生灾害,如地震后的山体滑坡、泥石流和水灾,使救援工作难度急剧增加。
在这一背景下,机器人成为了搜寻救援幸存者的重要工具。微型机器人因其体积小、重量轻、设计简单和适应性强的特点,能够进入狭窄或恶劣的环境中,这使它们在救灾、远程侦察和医疗等领域具有广泛的应用潜力。也因此,微型爬行机器人、微型飞行器和微型水下机器人等微型机器人近年来成为研究热点。
▍受鳄鱼启发!研发空心压电微型机器人
传统的微型移动机器人多采用电磁电机驱动,其优点在于高运动效率。然而,复杂的控制和传动系统限制了它们的微型化,使其难以进入狭窄或极端环境。因此,开发体积小、重量轻、灵活且适应性强的微型机器人成为了关键。
在实际应用中,快速移动和高适应性对微型机器人至关重要。前者确保运行效率,后者应对复杂恶劣环境。但如何在受限的设计中整合这些能力仍是挑战。现有微型机器人方案存在制造复杂、稳定性差和需大功率装置等局限。
针对上述问题,东北大学王延庆课题组受鳄鱼运动步态的启发,研发了一种基于多模态振动耦合的空心压电微型机器人(HPMR)。
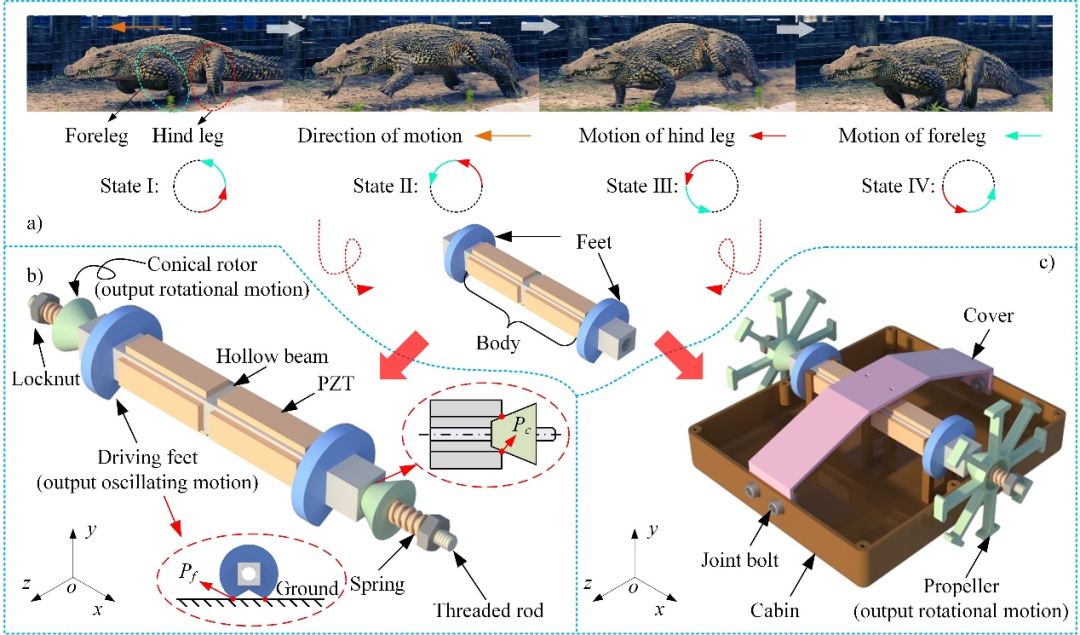
图1 空心压电微型机器人的结构设计方案
该机器人能同时振荡驱动脚和旋转内部转子,实现多任务处理,减少了外部组件和能量输入。其具体进步包括:1)在摆动模式下,体长13mm的机器人在200Vp-p电压下速度达160mm/s,在10Vp-p时最低速度为7.8e-2mm/s,位移分辨率为0.3μm。装配转子后,HPMR的速度和转子转速分别为95mm/s和890rpm,位移分辨率分别为0.84μm和7.28mrad。2)在旋转模式下,400Vp-p下,60mm机身长的机器人在玻璃和水面上的速度分别为396mm/s和156mm/s。3)摆动模式下负载能力高达90g(自重12.72倍),旋转模式下负载能力高达20g(自重1.19倍),可携带微型检测器件。4)机器人可在各种粗糙度表面运行并爬坡;旋转模式下,HPMR能抵抗冲击、跨越障碍物、跳下台阶,表现出强大的适应性。
该研究工作的相关论文(Inside Front Cover)以“Fast-Moving and Highly Adaptable Hollow Piezoelectric Miniature Robot”为题发表在国际知名期刊Advanced Intelligent Systems。论文的第一作者为博士研究生朱斌斌,通讯作者为王延庆教授。
图2 Advanced Intelligent Systems封面
▍超强适应力!HPMR如何设计构造?
鳄鱼,这种在陆地和水中都具备卓越运动能力的两栖生物,其独特的运动模式吸引了课题组的注意。
鳄鱼在行进时,前后腿同步摆动而非交替,且前腿的摆动相较于后腿提前四分之一周期,这种协调而高效的运动方式为课题组的机器人设计提供了灵感。
通过深入研究鳄鱼的运动机制,课题组发现其运动节奏可以清晰地划分为I-IV四个阶段。在状态I中,鳄鱼的后腿稳稳地停留在地面上,为接下来的动作积蓄力量。进入状态II,后腿开始发力推地,准备离地,此时依靠地面与脚掌间的摩擦力推动身体前行。状态III中,后腿在空中继续保持运动态势,并逐渐向地面靠近。最终,在状态IV,后腿再次与地面接触,调整角度,为新一轮的运动周期做好准备。这一系列连贯的动作使得鳄鱼的后肢运动轨迹呈现出一个椭圆形。值得一提的是,鳄鱼在水中也能通过类似的腿部摆动来游泳,展现出其运动模式的多样性与适应性。
受此启发,课题组在设计机器人时,巧妙地将其身体和腿部的运动方式简化为机器人的主体和驱动脚。机器人的主体采用表面贴有压电片的方形空心梁结构,这一中心对称的设计能够耦合正交方向上的弯曲振动。同时,结合空心设计,驱动脚的末端和内孔能够以椭圆形的轨迹进行往复振荡。
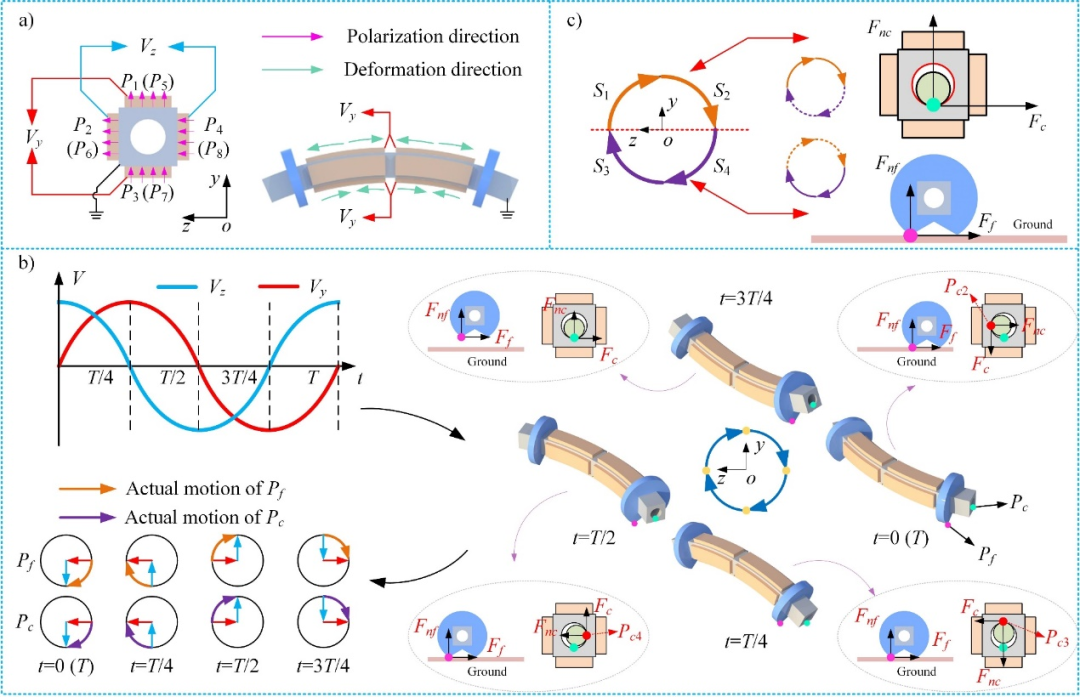
图3空心压电微型机器人的运行机理
这种设计不仅使得空心压电微型机器人在单一能量输入条件下能够实现多种运动输出,还成功地将摆动和旋转两种工作模式融合到一个机器人设计中。这两种模式的切换使机器人同时实现了快速移动性能和高适应性。
在摆动模式下,HPMR能够实现快速、高精度的直线运动;而在旋转模式下,其又能够驱动配置在内孔处的螺旋桨进而实现两栖、跨越沟壑、障碍、坑洼及跳阶等运动。
▍性能测试
通过基于商用 ANSYS 软件进行仿真分析和进行椭圆轨迹测试等工作,研究人员完成了样机的精细加工与精确装配。
在摆动模式下,样机体长仅为13mm,质量7.07g;而在旋转模式下,样机体长增至60mm,质量为16.58g,可满足不同运动需求。
为了全面评估机器人的性能,研究团队精心搭建了实验测试系统,对其运动性能进行了深入测试。
测试中,该空心压电微型机器人展现出多重显著优势:
(1)速度范围宽。在摆动模式下,HPMR能够实现速度范围介于6e-3~12.3BL/s的直线运动;当附加转子后,HPMR和转子的速度可达7.3BL/s和890RPM。在旋转模式下,机器人无论是在陆地还是水中,都能够实现卓越的两栖运动性能,地面运动速度可达396mm/s,水中运动速度可达156mm/s。
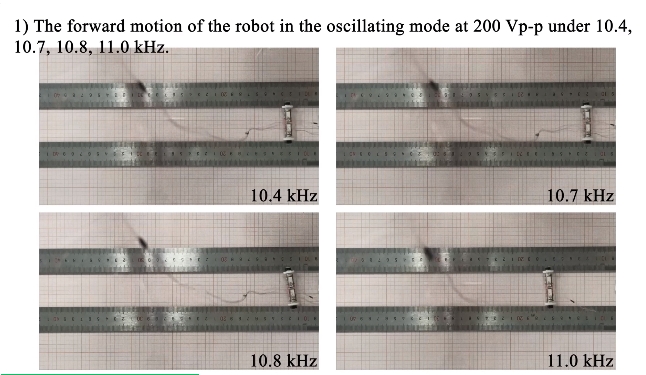
图4 在摆动模式下,机器人的运动表现
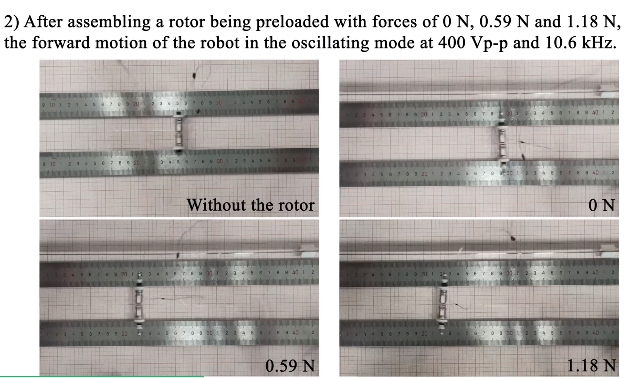
图5 装配转子后,机器人在摆动模式下的性能表现
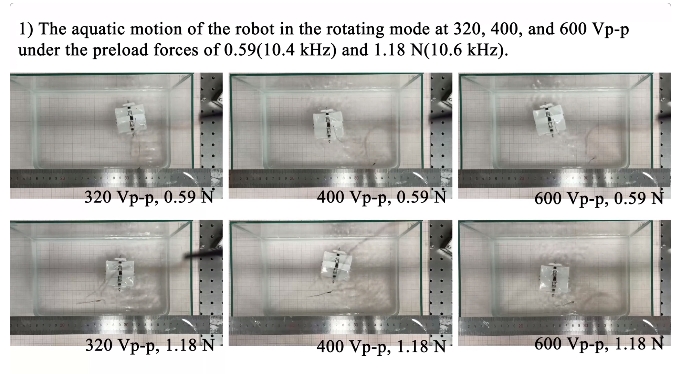
图6 在旋转模式下,机器人的运动表现
(2) 运动精度高。在摆动模式下,HPMR的位移分辨率可达到亚微米级(0.3μm),同时,机器人的启动时间迅速,仅需15ms;在附加转子后,机器人和转子的位移分辨率依然保持高精度,分别为0.84μm与7.28mrad。
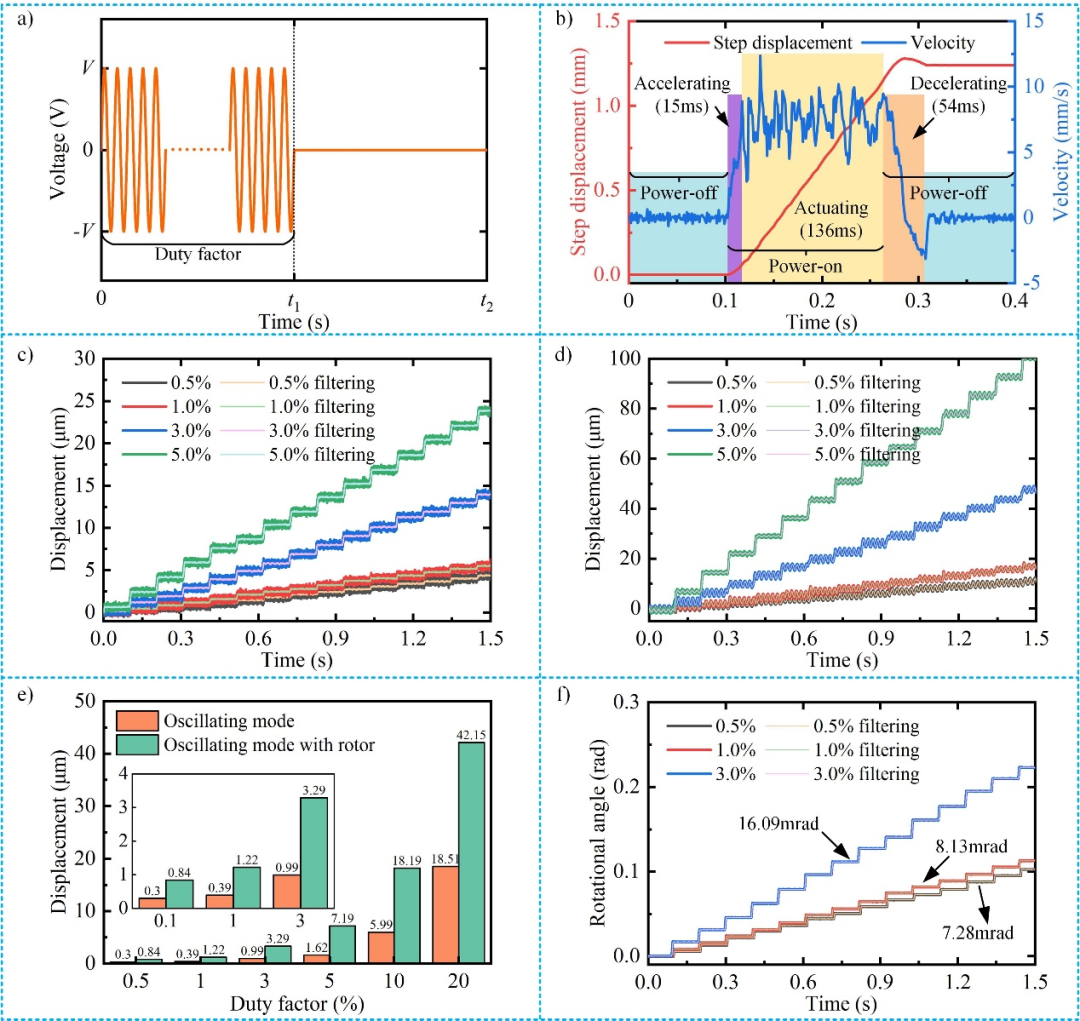
图7 摆动模式下 HPMR 的瞬态响应特性和位移分辨率
(3) 承载能力大。在摆动模式下,HPMR能够轻松携带相当于自身质量14.1倍的负载进行运动,而在旋转模式下,其最大载重为自重的1.19倍,这一特性使得HPMR具备了携带微型设备进行空间探测的能力;
(4) 适应性强。HPMR不仅能够在斜坡上自如攀爬,还能在具有不同粗糙度的地面上奔跑;而在旋转模式下,机器人能够抵抗来自地面或水面的冲击,轻松跨越沟壑、障碍、坑洼,甚至跳下台阶。
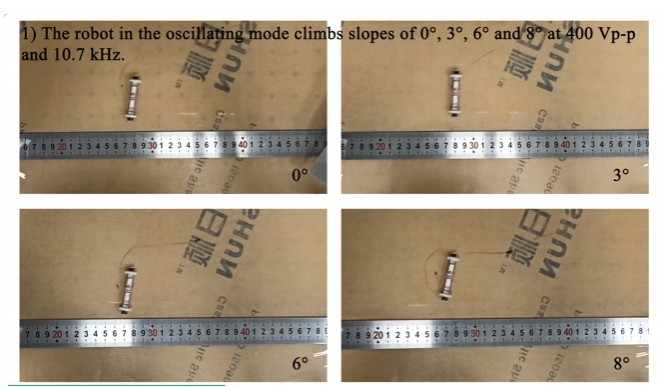
图8 适应性测试1:机器人在斜坡上的攀爬性能
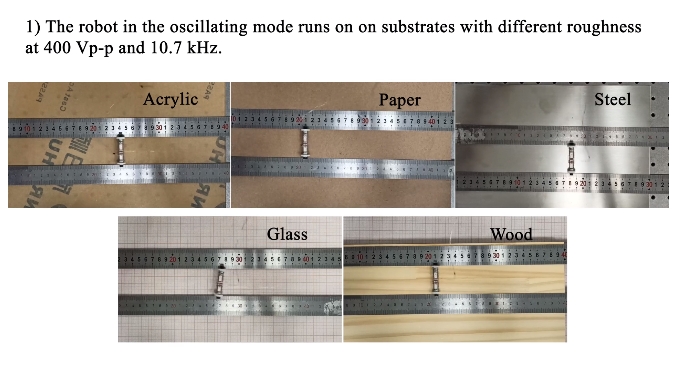
图9 适应性测试2:机器人在不同粗糙度的地面上的运动表现
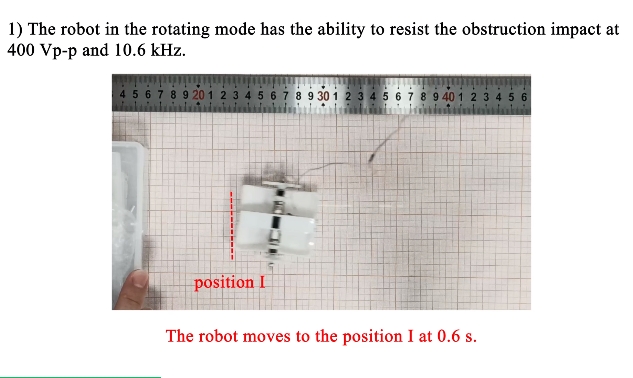
图10 适应性测试3:机器人抵抗冲击的能力及能够携带质量等于一枚微型摄像头的负载
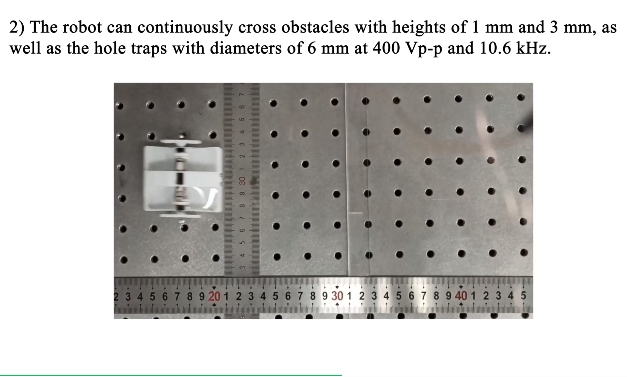
图11 适应性测试4:机器人跨越沟壑、障碍和坑洼及跳下台阶的表现
实验结果表明,HPMR凭借其小型化设计、快速精确的运动能力以及卓越的适应性,完美契合了现代机器人的多样化需求。特别是其独特的两栖移动性能,极大地拓展了潜在应用场景。这种基于空心构型的设计理念,在相同的能量输入和更少的外部组件条件下,显著增强了机器人在受限空间内执行多重任务的能力,展现了极高的实用价值和广阔的发展前景。
参考文章:
https://onlinelibrary.wiley.com/doi/10.1002/aisy.202300612



