
随着自动驾驶技术的发展,自动驾驶场景逐渐由路面扩展至水上,水面自动驾驶及其相关应用成为近年来研究热点之一。其中,内陆水域的水面自动驾驶具有较大的应用价值,如利用无人船的水域保洁、巡检监测以及自动驾驶船舶的内河运输、接驳、游览观光等。不同于海面场景,内陆的水面场景对自动驾驶算法有着新的挑战,例如内河相对狭窄的通航区域、树木遮挡的多径干扰、水面信号反射等,这些都对水面自动驾驶算法中环境感知的精度和鲁棒性提出了新的要求。
环境建图是水面自动驾驶的重要基础。无人船在内河航道的准确路径规划与行为决策,通常依赖于无人船对周围环境的准确建模与理解。在狭窄的内陆水道中,除了水面的障碍外还经常会有其他船只航行,如何更好地刻画附近的其他船舶的轨迹以及航道信息将对无人船的规划控制系统有着重要的意义。
除了要精确地刻画周围环境以外,如何适应水面上经常出现的恶劣天气状况也是环境建图的重要挑战。雨雾天气会干扰激光雷达探测精度,而水面的反光、倒影和光线较暗的场景同样会影响视觉感知结果。为了实现水面自动驾驶算法中环境建图系统的精确性和鲁棒性,本文将介绍欧卡智舶研究团队在水面自动驾驶环境建图方面的技术方案。
雨雾对激光雷达干扰

雨雾天气下水面场景
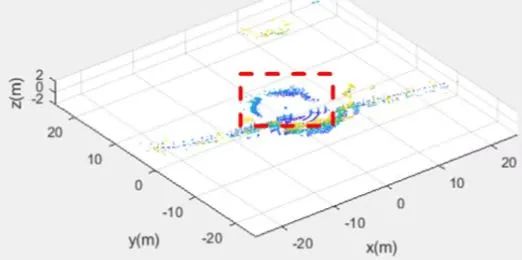
基于雷达点云的环境建图
通过激光雷达进行同步定位与建图(Simultaneous Localization and Mapping, SLAM)是自动驾驶及机器人行业的常见技术,可以帮助平台在复杂场景中进行精准定位;同时,其生成的3D点云地图具有较高的精细度,可辅助自动驾驶平台进行复杂任务。然而,在水面场景下,基于激光雷达的SLAM则面临着不同于路面场景的挑战。
首先,在水面激光雷达点云质量层面,由于水面反光,水面场景相比路面场景面临更复杂的光照环境,而强烈太阳光照会导致激光雷达的错误检测,进而影响SLAM效果;同时,水面场景更易产生雾气,同样干扰激光雷达的检测效果。在激光雷达SLAM算法层面,许多现有算法中,引入了地面约束以提升SLAM算法精度,例如Lego-LOAM、HDL Graph SLAM等,而对于水面场景,激光照射至水面后多被折射,无法形成回波,因此水面的激光雷达SLAM也缺乏此类地面约束,容易发生定位结果不准确、z方向发散的问题。此外,现有激光雷达SLAM算法多依赖于基于线、面特征的点云匹配,在路面场景下,形状较为规则的房屋、车辆、灯柱等,均可提供较好的线、面特征约束;而在水面场景下,周围环境常为密集植被、平缓坡面等,缺乏适宜匹配的特征,导致SLAM算法崩溃。

水面“倒影+强光”场景
针对上述水面场景下的特殊问题,欧卡研发了适用于水面自动驾驶的多模态融合点云SLAM算法,通过融合卫星定位(Global Navigation Satellite System,简称GNSS)、惯性测量单元(Inertial Measurement Unit,简称IMU)、激光雷达、毫米波雷达点云等信息,实现了水面多场景下厘米级精度的定位与建图。
针对水面激光雷达点云质量不佳的问题,我们采用了毫米波雷达辅助激光雷达进行点云预处理,利用毫米波雷达天气鲁棒性较好的特点弥补激光雷达此方面缺陷。此外,我们提取了激光雷达点云中的水岸线信息,并将其引入SLAM算法中,作为额外的约束项来提升SLAM精度。
针对水面有效结构特征较少场景,在匹配阶段,我们对高结构特征与低结构特征区域赋予不同权重,以确保匹配效果。而对于整体缺乏有效结构性特征的场景,我们则将其视为激光雷达匹配退化场景,此时,引入基于毫米波雷达的里程计算法,融合GNSS与IMU,以保持整个系统较高的定位精度。一段多植被河道场景内的激光雷达建图视频如下所示。
基于多视觉的环境建图
除了基于雷达点云的环境建图外,摄像头所提供的视觉信息包含了环境中丰富的语义信息,传统的自动驾驶感知算法通常在单个前视图或透视图中执行检测、分割、跟踪等感知任务,而后将不同摄像头的感知结果进行融合。近年来,基于视觉鸟瞰图(BEV)的感知方案受到了越来越多研究者的关注,其通过集成来自不同摄像头的多源信息并在统一视图中表示特征,能够提供丰富且准确的全方位环境感知结果。此外,BEV空间下的感知结果有着更直观的表征形式,对于感知模块数据下游规划模块的应用也更为理想。
欧卡智舶针对水面场景下的自动驾驶感知任务研发了水面多摄像头视觉感知模型,通过输入多个环视安装的摄像头数据,以一个神经网络,同时在图像空间和鸟瞰图BEV空间下输出目标检测、水面可行驶区域分割。并且采用了数据驱动的开发模式,通过海量的训练数据,使得模型有较好的感知性能。通过构建高效的数据闭环方式来实现模型的快速迭代,目前已经累计收集了国内上百个水域中的感知数据,使得水面视觉感知模型可以在大多数新的水域场景中完成可靠的感知。
总结
本文对欧卡智舶研究团队在水面自动驾驶环境建图中的技术进行了简单地介绍,通过融合激光雷达、毫米波雷达、摄像头、IMU和GNSS,使得产品在复杂水面环境中依旧可以得到准确且鲁棒的环境地图。目前欧卡智舶的自动驾驶游船“汐”已经搭载这两种建图方案,能够自主在复杂的水面场景下为后级规划控制提供精准的环境信息,使得船更加智能的完成自主航行。通过水面自动驾驶技术,让水域更美好!



