
凭借出色三维运动能力,多旋翼无人机(mUAVs)正逐步发展成为兼具货物运输与任务执行能力的多功能机器人平台,展现出无限潜力。
当前,“空中物理交互(APhI)”任务正日益受到业界的瞩目,在这类任务中,无人机机身或其搭载的机械臂被灵活应用于与外部物体的直接物理交互中。尤为值得强调的是,那些聚焦于mUAV与人类协同工作的物理人机交互(pHRI)任务,已经赢得了业界的广泛关注和热烈反响。
▍推出Palletrone平台,实现精确飞行控制与互动
在pHRI领域,多旋翼无人机追求的核心目标是实现与人类操作员之间直接、精确的飞行控制互动。这要求赋予个体能力,使其能够直接对无人机平台施加力量,并根据操作员的意愿灵活调整飞行路径,而无需依赖复杂的自主路径规划算法。基于这一创新理念,人们可以设计并采用一种新颖且直观的货物运输技术。
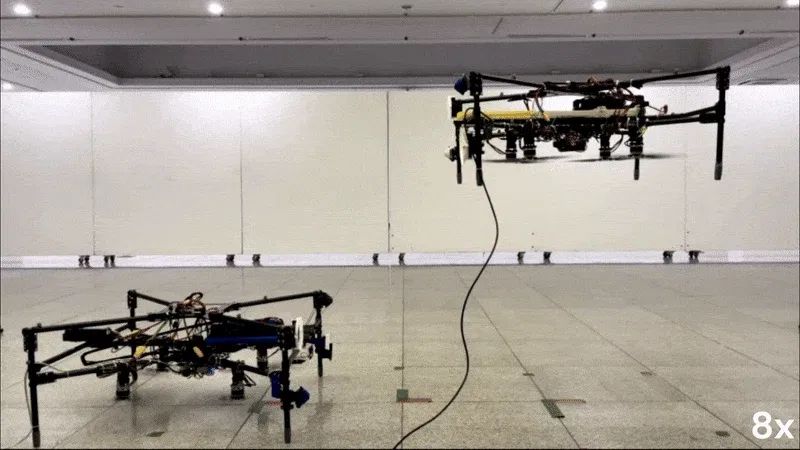
想象一下,在购物中心轻松驾驭购物车的场景,货物被安全地放置在特制的货舱中,而无人机的飞行则完全由pHRI来操控。这种创新方法不仅实现了直观、高度交互式的空中货物运输,还特别适用于最后一英里包裹配送、购物中心以及工厂环境等多种场景。由于多旋翼无人机无需与地面直接接触即可悬停,因此在楼梯、崎岖路面等复杂环境中,与传统轮式手推车相比,这种方法具有显著的优势。

然而,截至目前,多旋翼无人机的pHRI方法,如使用系绳或直接抓握机身,仍存在一些局限性,包括力量交互的单向性、旋翼叶片可能带来的身体伤害风险,以及人体接触对无人机飞行姿态控制的干扰等。
针对这些问题,韩国首尔国立科技大学的研究人员最近进行了深入研究,并提出了一种基于pHRI的新型空中货物运输解决方案。该方案包括创新的飞行硬件和新的pHRI飞行控制器设计。
同时,该研究团队还推出了名为Palletrone的平台。该平台采用了柔顺控制算法,并引入了扰动观测器(DOB)鲁棒控制算法,实现了对人类诱导力量的鲁棒运动控制性能和pHRI力量的精确估计。这一创新不仅简化了控制系统设置,还提供了计算上更为轻便的柔顺控制结构,为空中货物运输领域带来了新的突破。
那么,该研究具体内容是怎样的呢?接下来,和机器人大讲堂一起来深入探讨!
▍Palletrone平台的硬件结构设计
Palletrone,这一创新的全驱动多旋翼平台,设计了宽阔的上部平面,极大地方便了货物的装载作业,并受日常购物车启发巧妙地融入了一个后置手柄设计。该平台通过人类操作员手持该手柄,并施加三维方向的力与扭矩,实现精准飞行轨迹控制,确保在整个飞行旅程中,货物运输保持高度稳定,无惧侧倾与俯仰的干扰,保障了运输的平稳性。
具体而言,Palletrone采用了立方体多孔面板结构,这一精妙设计不仅有效防止了人体与旋翼的直接接触,确保了操作安全,同时保证了推进系统所需的气流畅通无阻。其上部的平坦表面,相较于传统机身下置货舱的设计,提供了更为灵活多变的货物装载方案。内部则以X型框架为骨干,每条臂上都装备了旋翼推进系统及伺服电机,用于精细的推力矢量控制。此冗余系统集成了八个高效执行器:其中四个旋翼负责产生推力F{1,2,3,4}∈R,而另外四个伺服电机则精确调控推力矢量的角度θ{1,2,3,4}∈R,展现了卓越的控制精度。
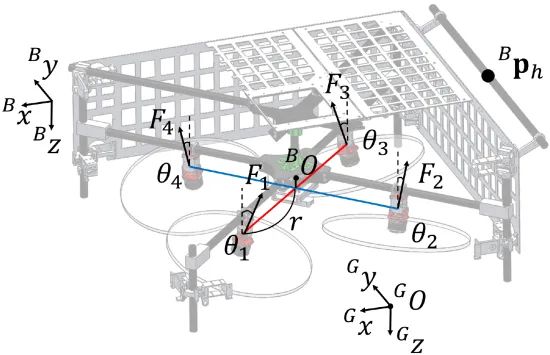
后部精心设计的扶手,不仅便于用户进行物理交互,更允许用户通过它施加平移力量并灵活调整飞行方向,极大地提升了操作的便捷性与直观性。通过这八个执行器的紧密协作,研究团队成功实现了对三维推进力矢量BFp=[Fp,x Fp,y Fp,z]T∈R3×1及姿态控制扭矩矢量BTp=[τp,x τp,y τp,z]T∈R3×1的独立控制,赋予了Palletrone全驱动的六自由度飞行能力。在pHRI运输任务中,通过维持恒定的滚转与俯仰姿态,充分利用平台的全驱动飞行特性,确保了货物的绝对稳定运输。
在硬件构成上,Palletrone除螺旋桨与伺服电机外,大部分组件均为坚固的固定结构,且螺旋桨与伺服电机的总质量占比相对较小,这一特性使其整体可近似视为一个单一刚体,便于动力学分析与控制。此外,Palletrone平台的动力学模型全面考虑了力与扭矩的平衡,以及外部人机交互力的影响,确保了模型的准确性。其独立产生力与扭矩的能力,使得平移与旋转运动得以独立进行,进一步优化了飞行性能。最终,Palletrone的运动特性可依据与微型无人机(mUAVs)相关的成熟动力学模型进行精确描述。
凭借其独特的硬件设计和卓越的动力学特性,Palletrone mUAV平台可为空中人机交互货物运输提供高效稳定的解决方案。
▍Palletrone平台的飞行控制鲁棒性与精确度提升
为了在人类操作员直接干预下实现飞行器运动的高鲁棒性控制,并精确估计物理人机交互(pHRI)过程中产生的力量,研究团队巧妙融合了柔顺控制算法与扰动观测器(DOB)鲁棒控制算法。这一创新策略不仅优化了飞行器的动态响应,还提升了系统的整体性能与稳定性。
A. 扰动观测器的运用
展望未来pHRI飞行任务,人体操作员将通过施加力与扭矩直接引导飞行器,这一过程中任何细微的力变化都可能显著影响飞行轨迹。研究团队深刻认识到,这些力不仅是柔顺控制算法的输入信号,还潜在地干扰着控制扭矩的精确生成,从而可能引入非预期的飞行行为。
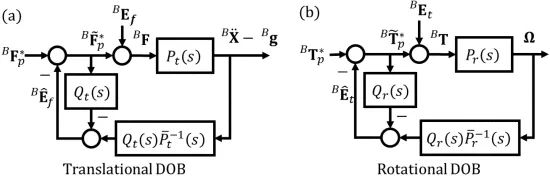
为此,团队精心设计了DOB算法架构,旨在有效减轻由BEf(外部力扰动)和BEt(外部扭矩扰动)引起的不良影响。在平移控制方面,团队通过IMU传感器实时测量加速度,并将其输入到Pt(s)逆名义模型中,以精准估算系统所受合力BF。随后,将这一估算值与理想力命令BF∗p进行对比,从而分离出BEf的具体值。为确保估算的精确性,团队还引入了Qt(s)低通滤波器,其相对度至少为1,以进一步提升DOB估计过程的严谨性。通过这一流程,团队成功生成了包含扰动补偿的修正控制输入BF~∗p,显著提升了平移运动的稳定性。
面对旋转控制的挑战,考虑到IMU无法直接测量角加速度,团队转而利用角速度信息,并结合旋转动力学的简化模型,通过Qr(s)低通滤波器(相对度至少为2)精确估算BEt,进而生成修正后的旋转控制输入BT~∗p。这一系列创新举措,确保了旋转运动同样能够稳定、精准地响应操作员的指令。
B. 柔顺pHRI飞行控制的实现
为实现Palletrone平台在pHRI环境下的柔顺控制,研究团队引入了导纳控制技术。这一技术不仅充分利用了平台现有的运动控制器资源,还通过在前端增设额外控制器与外部力估计器,实现了对期望轨迹的灵活调整与系统力响应特性的优化。这一过程不仅保留了mUAV原有的平移与旋转运动控制器性能,还进一步增强了飞行稳定性与整体性能。
具体而言,导纳控制算法通过其独特的传递函数设计,仅依赖外部力输入即可调整飞行轨迹。而DOB算法在此过程中则扮演了关键角色,它负责精确估计外部力与扭矩,从而简化了控制器的整体结构,降低了调参难度,并使得系统的稳定性与性能分析变得更加直观与便捷。
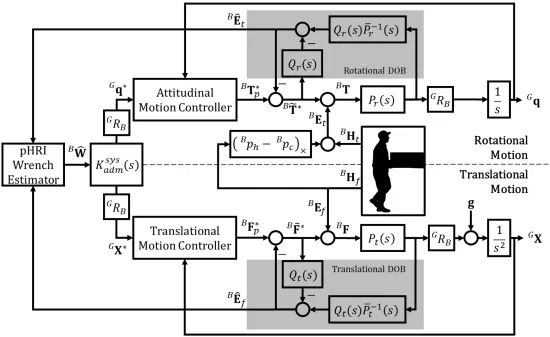
上图展示的pHRI飞行控制算法架构中,团队巧妙地将DOB与导纳控制相结合。通过DOB估算的BEt信号,系统能够实时生成修正后的参考轨迹,并经由平移与旋转运动控制器精确执行。这一闭环控制策略不仅有效降低了外部扰动对系统的影响,还通过DOB的内部估算机制进一步优化了pHRI扭矩的估计精度。
C. 性能与稳定性的双重保障
在DOB与导纳控制的协同作用下,Q滤波器的设计成为了决定系统性能与稳定性的关键因素。通过精心调整Q滤波器的参数,团队成功实现了对扰动的有效抑制与pHRI扭矩的精确估算。在性能评估方面,团队深入分析了力-加速度传递函数的幅频与相频特性,验证了提高Q滤波器截止频率对于减少质量不确定性影响、提升系统响应速度与外部力估计精度的积极作用。
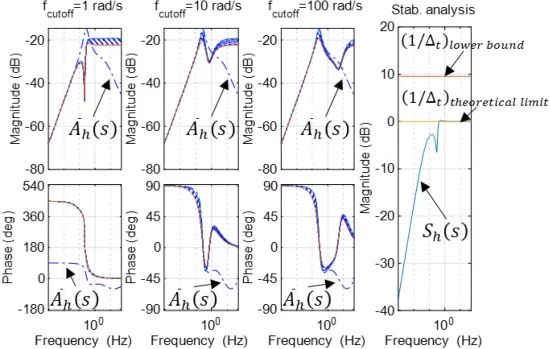
而在稳定性分析领域,团队则巧妙地运用了小增益定理来应对系统质量变化带来的不确定性。通过确保Q滤波器参数满足稳定性条件,团队成功验证了指定货物重量范围内系统的鲁棒稳定性。这一系列研究成果不仅为空中人机交互货物运输提供了坚实的技术支撑,还为未来智能无人系统的发展开辟了全新的研究方向。
▍Palletrone平台pHRI环境下飞行性能验证
为了全面评估Palletrone平台在物理人机交互(pHRI)环境下的飞行性能,研究团队精心策划并执行了三项精心设计的实验,从不同维度深入探索其性能表现。
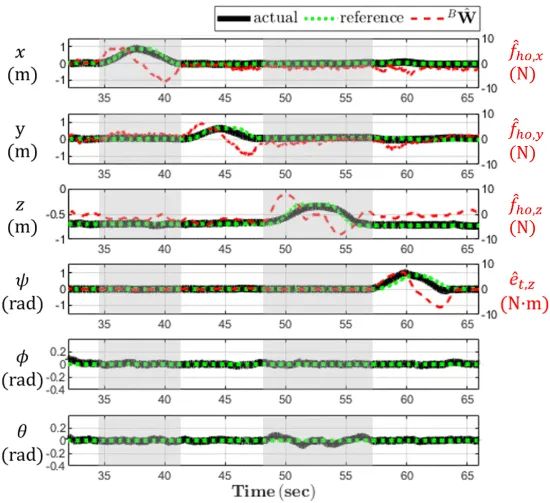
4-DOF pHRI飞行性能验证
该实验聚焦于验证平台在采用pHRI控制手段时,对于三维平移与偏航旋转的独立精准控制能力,同时确保在飞行过程中滚转与俯仰姿态的稳定维持。通过人为施加力和扭矩,实验直观地展示了Palletrone平台如何精确捕捉并响应操作员的操控意图,严格遵循目标运动通道进行位置调整,充分证明了其卓越的运动控制效能。
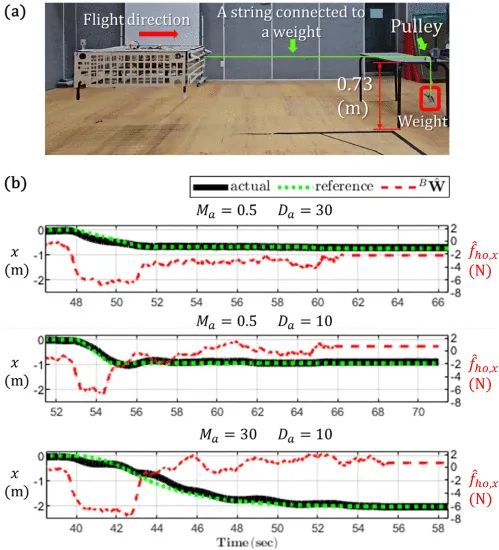
导纳调节对飞行特性的影响
在本实验中,研究团队通过动态调整导纳控制器的参数,深入考察了这些参数变化对飞行行为的直接影响。实验结果表明,导纳参数的灵活调整能够显著改变平台对外界作用力的响应灵敏度,从而实现了根据用户个性化需求定制飞行特性的目的。尤为引人注目的是,当虚拟惯性被人为增大后,即便外力源被移除,平台仍能凭借增强的惯性效应继续保持运动状态,这一发现彰显了导纳控制在应对复杂飞行场景时的灵活应变能力与高度可调性。
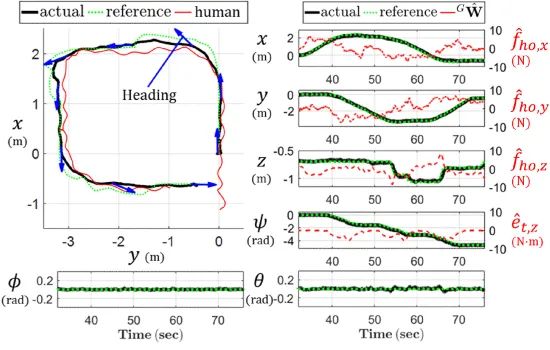
pHRI常规飞行场景验证
为检验Palletrone平台在实际应用中的表现,该实验精心构建了一个模拟货物运输的真实场景,邀请人类操作员直接参与,操控装载有实物的Palletrone平台沿随机设定的轨迹进行飞行测试。实验结果显示,平台不仅能够紧密跟随操作员的即时操控指令,实现航向与垂直运动的精准同步,而且在整个飞行过程中始终保持着稳定的滚转与俯仰姿态,充分验证了pHRI技术在货物运输领域的可行性与高效性。
以上实验不仅充分展示了Palletrone平台在独立运动控制、飞行特性高度定制及实际应用场景中的卓越表现,更为其未来在更广泛领域的应用奠定了坚实的理论基础与实践验证。
参考文章
https://ieeexplore.ieee.org/document/10563997



