
单手搭载全球最多的978个多维触觉传感器,15种触觉感知能力,3912路触觉信号路数,说帕西尼DexH13是全球最强的多维触觉灵巧手一点也不为过。
20世纪末,产业开始关注灵巧手的感知能力进阶,当时德国宇航中心研发的DLR-Ⅰ和DLR-Ⅱ灵巧手共集成了25个压力传感器,现在灵巧手的传感器数量已经达到近百个。英国某知名厂商生产的灵巧手,仅搭载了100多个压力传感器,售价就已经飙到了150多万。
再对比看帕西尼这款DexH13,不得不感叹中国制造性价比超乎想象。
DexH13不仅配备了高达800万像素的高清AI手眼相机,精准捕捉各类物体,为探索创新科研领域与多元化应用提供了强有力的支持。即便在工业应用场景中,DexH13同样表现出色,其5KG的强大负载能力、15N的高指尖力,以及百万次开合,均充分证明其满足严苛工业需求的卓越性能。
据了解,帕西尼在11月9日正式面向市场开启官方商城线上预定通道,为了拓宽灵巧手的应用范围,帕西尼为用户特设首批预定专属福利活动,意在让更多用户有机会体验并受益于这一前沿技术的便捷与卓越性能。
有意向订购的客户,可访问帕西尼官方商城:https://mall.paxini.com,即可完成预定。

▍仿生技术与性价比的完美平衡
一般而言,机器人灵巧手的自身复杂性主要表现在整体仿生结构、驱动、传动、感知、复合材料、建模与控制等方面的关键技术,灵巧手的能力则体现在“灵巧”和“作业”两部分。灵巧性是由于灵巧手关节自由度分布、关节数量要求较高,作业能力由于灵巧手需要具备更强的操作负载能力、力位精度与可靠性。DexH13无疑在这几个方面有着领先性。
首先,DexH13模仿了人手的结构和运动逻辑,考虑到人体工程学的尺寸要求,但又从实际应用场景出发进行结构设计,在追求性能最优化的同时,兼顾空间限制和重量等实际应用中的实用性因素,并考虑到了成本效益,实现两者之间的合理折中。

就真实人手而言,单手虽然自由度为21个,但机器人灵巧手是一种基于人手运动学设计的特殊末端执行器,绝大多数机械手无法完美复刻人手的功能,需要依据特定情景权衡简化。在手指中,小拇指作用少,在机器人上属于冗余的部分,但减去一个手指整体成本却可以降低1/5。
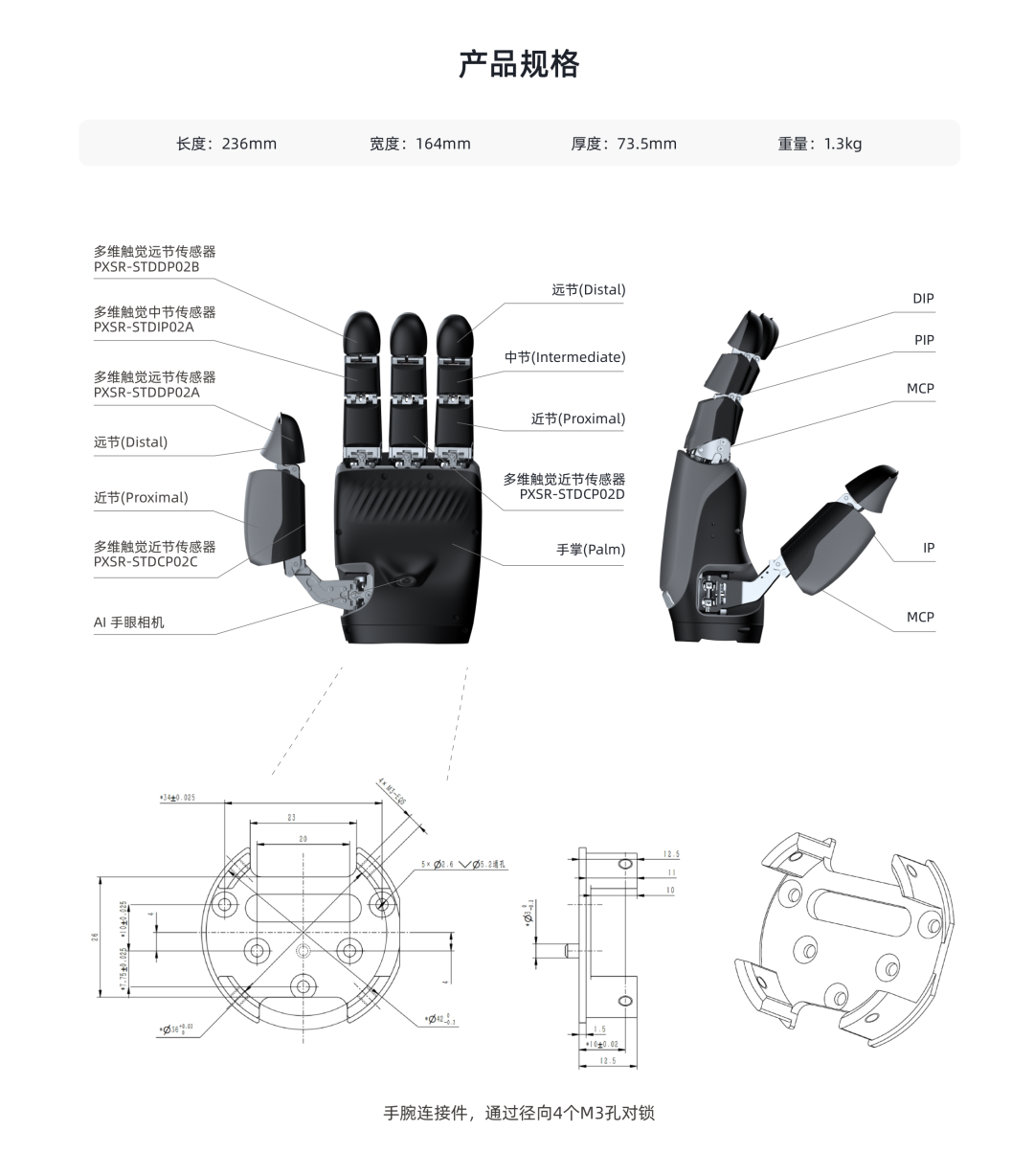
帕西尼因此与Okada灵巧手、Stanford/JPL灵巧手、Utah/MIT灵巧手等欧美主流方案类似,仅保留了DexH13的大拇指、食指、中指、无名指各3个自由度,共计13个,包含具有1个自由度的掌骨关节,可以完成屈曲/伸展和侧向摆动动作,还能高度还原人手动作模态,完美模拟抓、握、旋转、拿捏等复杂动作,助力多场景灵巧操作,柔顺交互。
其次,DexH13驱动结构采取旋转电机主流驱动方案,手指传动方案采取行星齿轮箱+丝杠+连杆的方式,同时集成了驱动和传感所需的所有组件,结构稳定可靠、运动可测可控,具有很高的灵活性,但由于融合先进材料与精密的结构设计,手指基部强度较大,从而稳定可靠,在过载或冲击时,能避免损坏手的机械结构,灵活适配多场景负重需求。这意味着在高动态运动中,其运行精度不会出现误差,且寿命非常过硬。
▍感知的全面升级
DexH13不仅外观和形式上实现了仿生,在运动功能同样达到人手的灵活精巧程度和目标适应性。灵巧手的功能主要由手指决定,灵活的手指可以有效地提高灵巧手的灵活性。DexH13虽然采取四指方案,但最大程度上强化了感知性能,这种“手眼结合”的能力,从某种程度上而言已经超越了人类。
感知是执行的前提,感知层的传感器是软件控制和硬件零部件的桥梁,是实现具身智能的关键,多感知能力融合目前已经成为未来灵巧手的重要发展方向。例如机器人进行工具灵巧操作,就要求灵巧手能够准确地反馈自身状态并感知周围环境,反馈灵巧手自身的位置或力等状态信息。为了实现这一目标,DexH13是将感知+动作生成这件事全面提升。

首先,在感知层面,通过双手整体搭载近2000颗自研生产的高精度触觉传感器PX-6AX GEN2,DexH13能在超高分辨力下进行压感、摩擦、软硬质地等15种多维触觉感知,达到全量程0.01N高精度测量,并提供精细温度补偿,除三维、六维力外,还能对材质、温度等多维物理信息触觉感知。
从作业执行步骤而言,灵巧手需要在操作前阶段靠近目标物体,在操作阶段用手形对目标物体进行操作,而更多的信息无疑可以建立灵巧手多维度、多层级的物体模型,使得作业更可靠,但是传统灵巧手配合的外置视觉,往往会受到光照、遮挡、透视变形等因素影响。

因此,DexH13就在触觉系统以外,额外搭载了先进的AI视觉系统能够识别和抓取物体六维位姿,适应多种复杂环境和任务,零样本位姿估计视觉算法与 800 万高清 AI手眼相机完美融合,赋予DexH13卓越的触·视觉能力,有助于更准确识别物体的位置、形态等信息。
在操作前阶段,DexH13会先使用视觉和近端传感器来检测物体与灵巧手之间的距离,当灵巧手接触到物体时,内部的触觉传感器提供物体的物理信息和接触力,从而获取被接触物体的信息,增强了在复杂任务程序和多元场景中的通用性。而且面对大量视触觉数据,DexH13通过搭载的视触觉多模态感知模型 VTLA-Model与PX-Core 控制核心,强大的控制算法使得处理复杂任务时响应速度不会变慢,而是可以实现精准、高效控制。
这一方面可以帮助机器人完成更丰富的多维度感知,实现可靠的决策,使得DexH13 具备如人类般细腻灵敏的触觉感知能力与视觉位姿估计能力,从而能够完美模拟人手的抓取、旋转、拿捏等各项复杂动作。
另一方面,搭载DexH13后,机器人还能够具备更稳定的执行能力,完成人类生活中大部分的精细化操作任务。

例如在装配产线上,机器人能借此充分感知零部件的位置、形状、尺寸与材质等信息,准确完成精密工件的装配任务。在质检环节,其可对零部件的大小、材质、表面粗糙度、凹凸程度的外形特征进行全面识别,同时,还能替代人类通过触摸完成更智能、更细致的功能测试,实现高效的质量检测。在工业制造、医疗康养、仓储物流,乃至科研和手术机器人领域,这款产品都有着非常不错的想象力。

▍结语与未来
作为人形机器人抓取物体的重要工具,灵巧手技术路线和配置方案直接决定了人形机器人在实际操作过程中的表现。因此在过去学界和产业界研发和生产灵巧手的过程中,一直存在各式各样的方案,灵巧手的性能差异也因方案的不同产生较大差别。
近几年随着特斯拉等企业高调进入人形机器人赛道,产业快速兴起并有望加速商业化落地,各家人形机器人厂商对灵巧手的方案选择尤为关注,因而究竟选择怎样的方案配置成为人形机器人落地前夕的最后一道难题。触觉灵巧手作为最有望带来人形机器人功能提升的产品,或将引领迭代升级的革命。

在此之前,帕西尼的触觉传感器在业内已具有较强的核心竞争力,目前帕西尼在多维度阵列触觉传感器领域的出货量位居第一名,厚积薄发保证了产品质量与产能。
DexH13作为市场上首款将多维触觉与AI视觉双模态能力集成于一体的四指仿生灵巧手,目前已经全面上线,值得广大用户关注购买。同时,帕西尼其备受业内推崇的触觉传感单元系列也已在线上商城同步上架,供广大客户选购。
官方商城直达链接:
https://mall.paxini.com



