
在技术与人类生活深度交融的时代,仿生机器人技术正迎来重要发展契机。随着机器人与人类在复杂环境中共存需求的不断上升,如何在保障安全性的同时提升机器人运动的灵活性与负载,成为研究的核心挑战。针对这一问题,仿生柔性致动器技术以生物肌肉的非线性运动特性为灵感,通过提供自然、可控的柔性关节运动,为机器人赋予了更高的灵活性和适应性。近日,曼彻斯特大学杨皓森博士、吉林大学/曼彻斯特大学任雷教授以及索尔福德大学魏国武教授联合团队,在《Advanced Bionics》(仿生学前沿)期刊上发表了题为“Compliant actuators that mimic biological muscle performance with applications in a highly biomimetic robotic arm”的研究论文,提出了三种仿生柔性致动器的设计与应用。
其中,团队开发的磁集成柔性致动器(MISA)作为核心技术,在《IEEE Robotics and Automation Letters》期刊发表的论文“A Novel Soft Actuator: MISA and Its Application on the Biomimetic Robotic Arm”中进行了详细阐述。三种致动器被成功应用于一种新型仿生机械臂的研发,该机械臂基于骨骼、韧带、肌腱和肌肉等结构进行优化设计。相关研究成果还以两篇论文形式发表于《IEEE Transactions on Robotics》期刊,分别为“Development and Characteristics of a Highly Biomimetic Robotic Shoulder Inspired by Musculoskeletal Mechanical Intelligence”和“Enhancing the Performance of a Biomimetic Robotic Elbow-and-Forearm System Through Bionics-Inspired Optimization”。通过整合人体关节的“机械智能”,这一研究不仅实现了机器人灵活性和稳定性的突破,也为多领域应用提供了可能性。
▍从自然中汲取灵感:仿生柔性致动器的开发
研究团队开发了三种新型柔性致动器,包括外置压缩弹簧致动器(ECA)、内置扭转弹簧致动器(ICA)和磁集成柔性致动器(MISA)(如图1所示)。这些致动器通过模仿生物肌肉的特性,在紧凑设计中实现了卓越的性能:
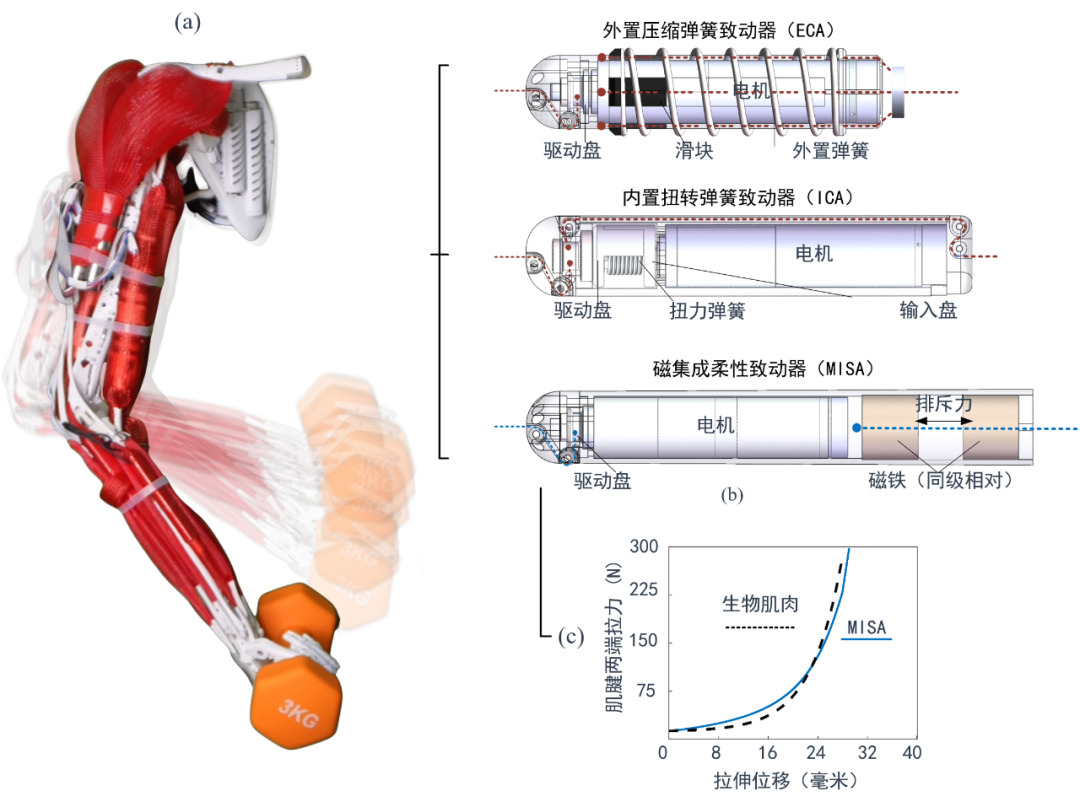
图1. (a) 高仿生机械臂样机;(b)三种新型柔性致动器;(c)MISA和生物肌肉的被动特性曲线。
高功率密度:ECA 和 ICA 通过优化设计实现了高功率输出,其功率密度分别达到 111.6 W/kg 和 361 W/m³。这些致动器在尺寸和形态上与生物肌肉相似,为基于人体结构的仿生机器人提供了强劲的动力支持。
非线性仿生特性:MISA 利用磁铁间排斥力的非线性关系,成功模拟了生物肌肉的被动特性。例如,如图1(c)所示,当肌肉被动拉伸时,所需拉力随位移急剧增加。实验表明,与传统线性弹性元件相比,MISA 实现了超过 5 倍的关节刚度调节范围,同时具备卓越的功率密度(345.02×10³ W/m³)。此外,MISA 能够模拟生物关节在松弛和紧张状态下的动态行为(如图2所示),例如散步时松弛的肘关节和击拳时绷紧的肘关节。这一特性为开发更自然、更高效的仿生机器人提供了核心技术支持。
任务执行能力:研究团队利用仿生机械臂完成了多种实际任务,包括举重(峰值功率 36 W)、打乒乓球(末端速度 3.2 m/s)和开门等操作,验证了这些柔性致动器在多种任务场景中的实用性。
适配性:凭借紧凑的设计,这些致动器能够适配于类人机器人、康复机器人和软体机器人,展现出广泛的应用潜力。其灵活性使其适用于医疗康复、工业自动化和人机协作等多样化场景。
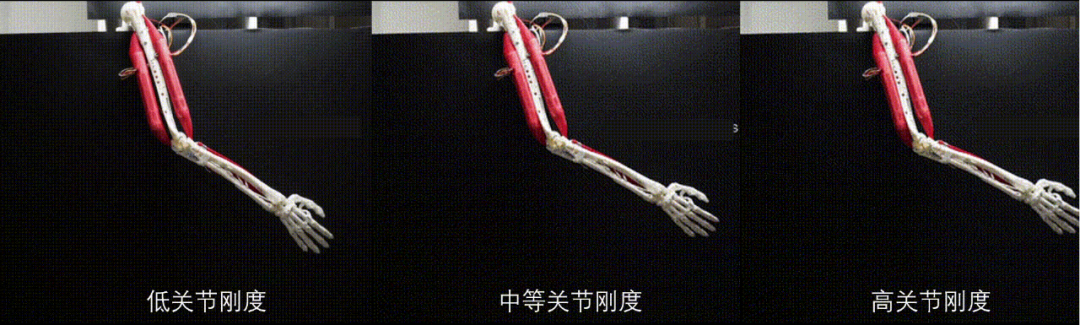
图2. 不同关节刚度下的机械臂被动摆动状态。
▍构建高仿真机械臂:融合灵活性与稳定性
研究团队以人体解剖学为基础,利用超过12个柔性致动器(如图3所示),成功开发了一款高度仿真的机械臂。与传统刚性设计不同,该机械臂通过模拟骨骼与软组织之间的复杂关系,平衡了灵活性与稳定性:
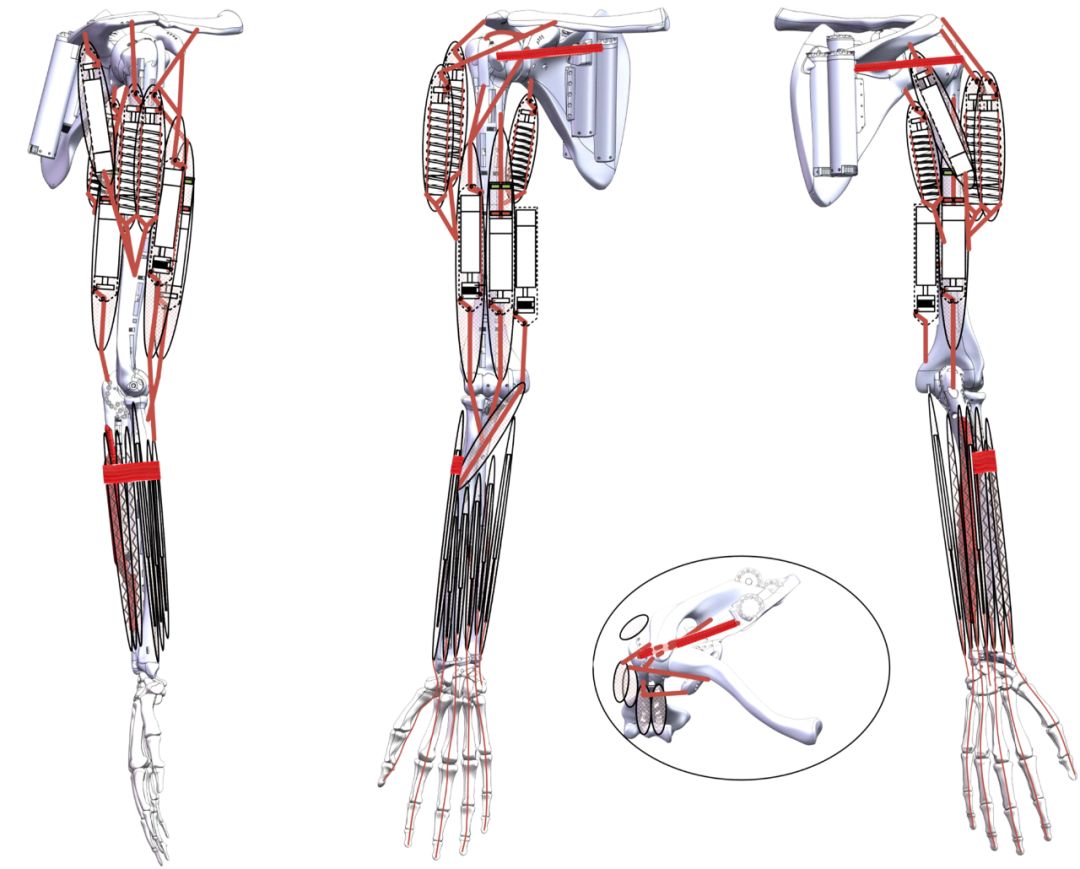
图3. 配置了12个柔性驱动器的仿生机械臂。
肩关节设计:如图4所示,机械臂肩关节首次采用了仿生的盂肱关节结构。相比传统的球窝关节设计,这种结构提供了更大的运动范围,同时通过创新的负压自锁机制、肌腱跨关节作用力以及韧带的精准布局确保了稳定性。该设计结合了灵活性与负载能力,可承受较大力量的同时维持关节的活动范围。这一“机械智能”成功解决了传统球窝关节在灵活性和稳定性之间的平衡难。
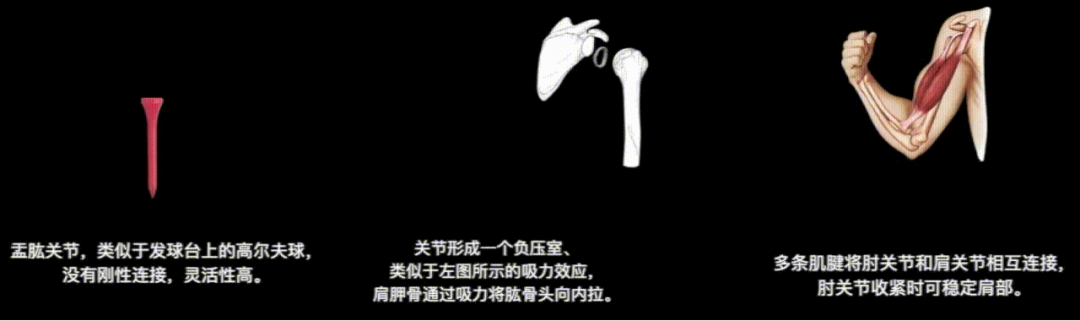
图4. 盂肱关节的仿生设计原理。
前臂设计:如图5所示,该机械臂的前臂再现了人体前臂的三骨结构(尺骨、桡骨及肱骨)与骨间膜(IOM)的协同作用。通过紧凑的设计,机械臂实现了流畅的前臂旋转和高扭矩输出,即使配备超过20个手部肌肉模拟单元,仍能在有限空间内保持卓越的动力性能。这一设计展现了人体前臂解剖学特征在机器人构建中的应用潜力。
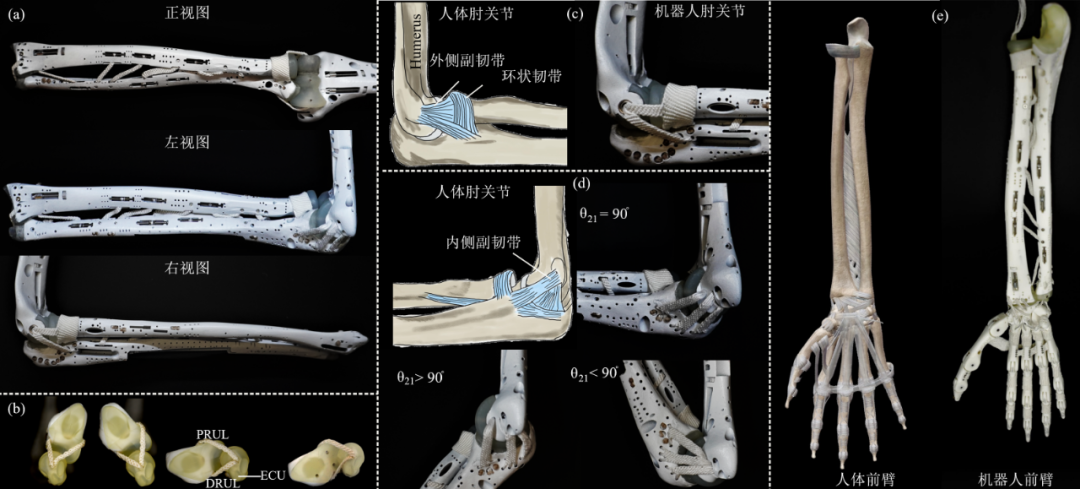
图5. 机械臂前臂软组织分布。
仿生结构验证:研究首次在机器人平台上,通过复现人体关节结构验证了解剖学经典理论,提供了对灵活性、稳定性与紧凑性平衡机制的新理解。这一成果不仅展现了人体结构的仿生优势,还为机器人设计的未来发展提供了重要参考。
▍实验验证:性能卓越的设计实践
研究团队通过一系列实验验证了仿生机器人手臂在运动范围、负载能力以及复杂任务执行能力方面的卓越表现,同时展示了该技术在实际应用中的潜力:
运动范围:肘关节运动范围接近人类肘关节的 98.8%,前臂旋转范围达到人类运动能力的 58.6%(在肩胛骨被固定的前提下)。
负载能力:机械臂能够稳定举起 2 kg、3 kg的重量,并在高动态环境下完成快速屈伸任务,如图7所示。
任务模拟:实验进一步验证了机器人在复杂环境中的任务执行能力。如图6和图7所示,机器人手臂成功完成了包括刮胡、放置物品和开门在内的多种复杂任务。这些操作充分体现了其在狭窄空间和多受限环境中的灵活性与适应性。
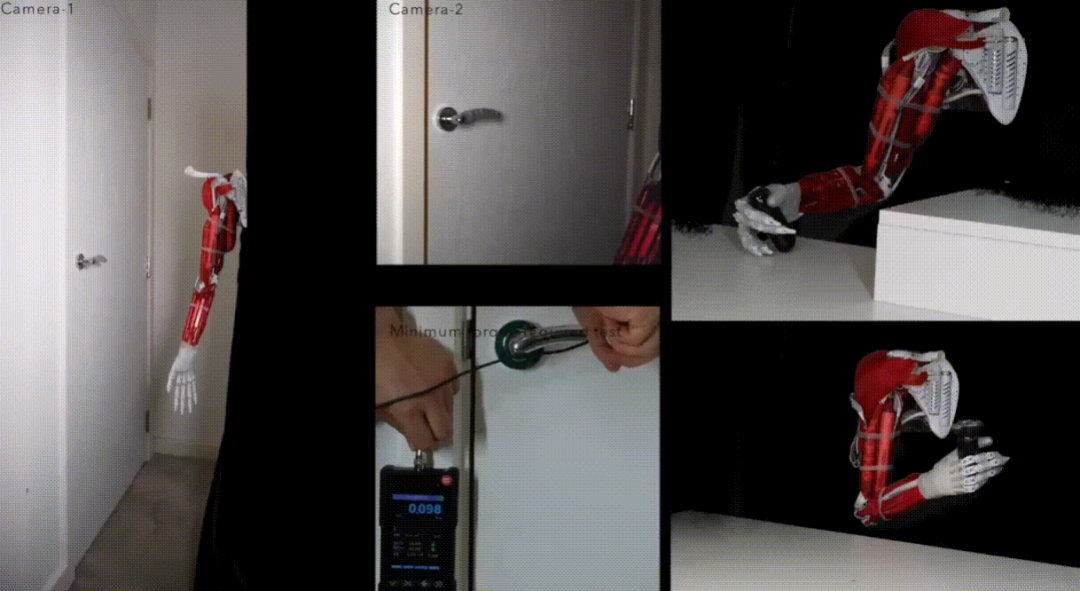
图6. 机械臂操作实验展示。
实验结果表明,该仿生机器人手臂在灵活性与稳定性方面的表现优异,为实际应用提供了重要参考。
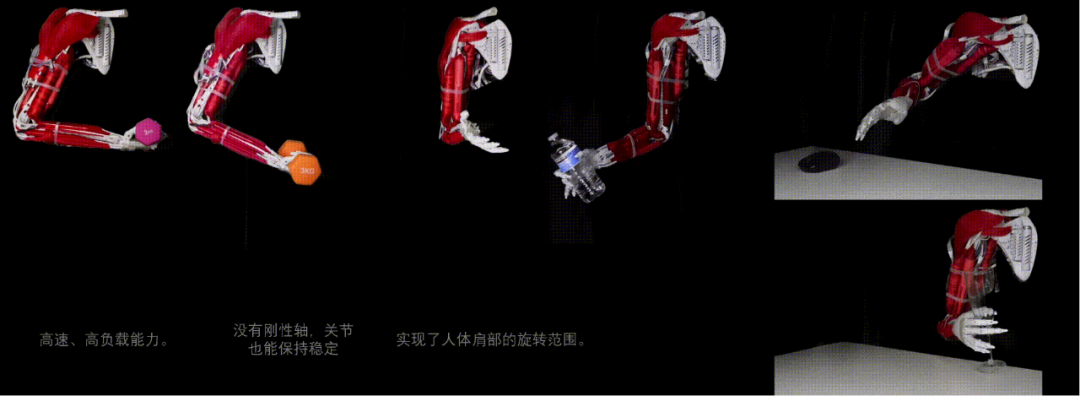
图7. 机械臂运动实验展示。
▍研究总结与未来展望
在本研究的开发过程中,研究团队以问题导向为核心,通过多次调整与优化,逐步完善了关键技术。例如,早期设计中的肩关节因韧带过紧而限制活动范围。团队深入分析了人体肩关节的解剖结构特性,创新性地引入弹簧预载系统,有效解决了活动受限问题。此外,在前臂设计中,团队通过仿生性地增加骨间膜(IOM),显著提升了前臂的旋转性能,同时增强了整体关节的稳定性。在柔性致动器优化方面,研究团队大幅提升了功率密度,并拓展了关节刚度调节范围,使机器人能够适应多样化的任务场景。这些成果不仅展现了人体关节复杂而精妙的“机械智能”,也为未来仿生机器人设计提供了重要的实践经验和启示。
本研究充分展示了生物结构在解决工程问题中的借鉴价值,通过将仿生学与工程学相结合,验证了柔性致动器与仿生机器人设计的潜力。研究团队展望,这项技术将在康复医疗(优化治疗策略)、工业自动化及人机协作领域发挥重要作用,为机器人设计向更智能、更高效的方向发展提供了全新思路。
论文第一作者为杨皓森,博士毕业于英国曼彻斯特大学,论文通讯作者为吉林大学/曼彻斯特大学任雷教授和索尔福德大学魏国武教授,英国皇家工程院院士,意大利博洛尼亚大学机器人学研究中心主任,Darwin G. Caldwell教授参与了论文的撰写。
来源: 国际仿生工程学会



