
每个上过生物课的人都见过蚯蚓,但你一定没见过这种蚯蚓!最近,天津大学的研究团队成功研制出一款仿生蚯蚓多模态蠕行机器人,重点是,这个机器人不是一般的“学样”,它真正复刻了蚯蚓的运动精髓。
这项研究以“Earthworm-inspired multimodal pneumatic continuous soft robot enhanced by winding transmission”为题, 被期刊Cyborg and Bionic Systems所录用。该期刊为美国科学促进会(AAAS)/Science旗下期刊,并入选中国科技期刊卓越行动计划高起点期刊,影响因子10.5。
▍让机器蚯蚓“活”起来的控制玄机在哪?
大自然总能给我们最好的启发。蚯蚓,这个在我们生活中常见的小生物,凭借其独特的多模态连续蠕动能力,能在各种复杂地形中自如穿行。这种运动方式,自然成为了研发新型蠕行机器人的重要参考对象。
不过此前的仿生研究中存在一个痛点:传统蚯蚓仿生蠕行机器人存在蠕动运动不连续、多模态适应能力不强等问题,其仿生效果“形似而神不似”。
针对这一问题,天津大学的研究团队创新性地提出了基于多重蠕动波叠加的连续控制律(DOCCL)。在该种控制方式下,机器人的各蠕动波从头部传递到尾部,通过调控多个蠕动波之间的时间相位差(ti),以实现运动性能增强。
以双蠕动波为例分析,在双蠕动波的共同作用下,会产生四种运动叠加状态,当相邻蠕动波的时间相位差为ti=t1+t2时,机器人的速度提升至单波的两倍,达到最佳。
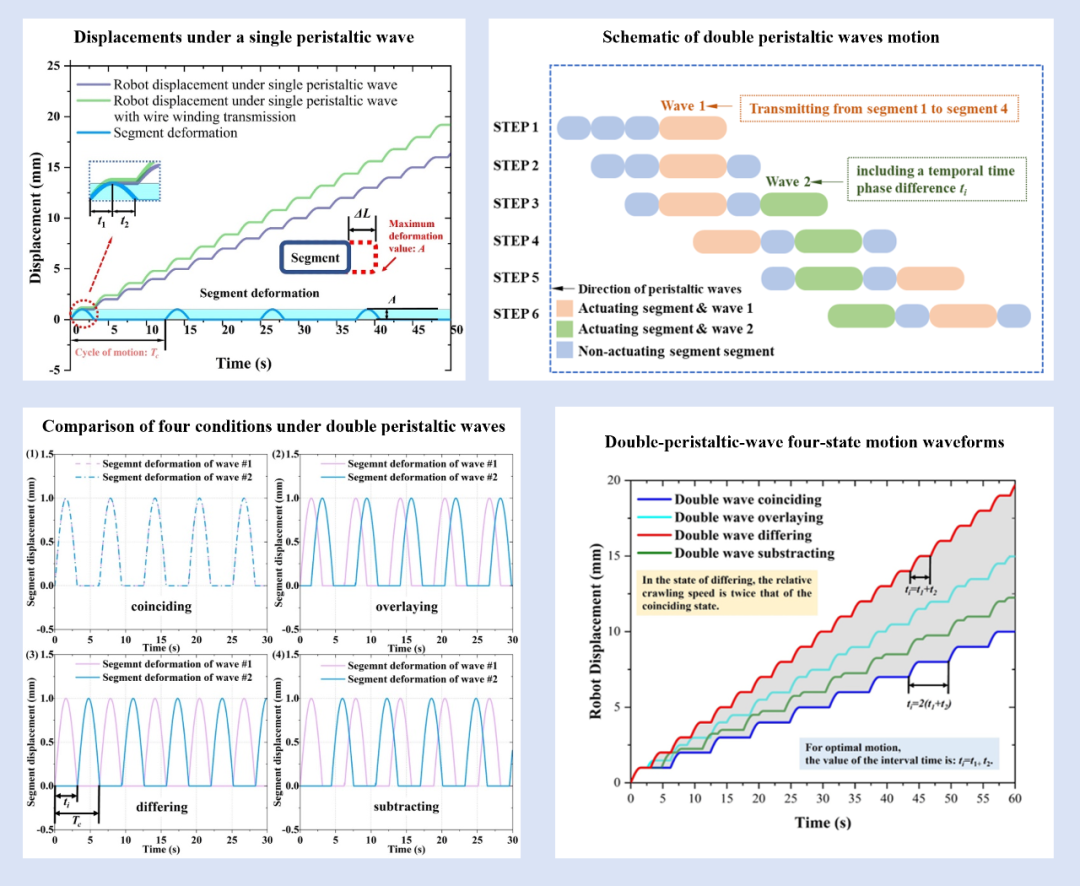
图1 机器人蠕动波与重叠连续控制律(DOCCL)
▍正六边形有玄机,线缆驱动显奇效
说到结构设计,天大团队也是别出心裁。他们给机器人的体节设计成了正六边形截面,这种设计让机器人能够在平面和管道两种环境下都如鱼得水。
研究团队采用了有限元分析软件ANSYS进行优化。通过正交实验定量分析体节变形,体节最大可达71.5%的理论形变。
这是什么概念?简单说,就是这个机器人的形变能力特别强,能更好地适应各种复杂环境。
团队创新引入的线缠绕传动约束方法也很奇妙。传统的仿生蚯蚓机器人都是每个体节单独驱动,就像几个人各自为政,配合总是差那么点。
而天大团队的这个设计,就像给所有体节都连上了“神经”,当机器人某段体节伸长,会带动其他段体节的收缩,从而实现体节一致变形,使机器人运动更加类似于真实蚯蚓。
这样就进一步提高了机器人的运动性能。事实证明,线缠绕传动约束显著增强了机器人的运动效率。
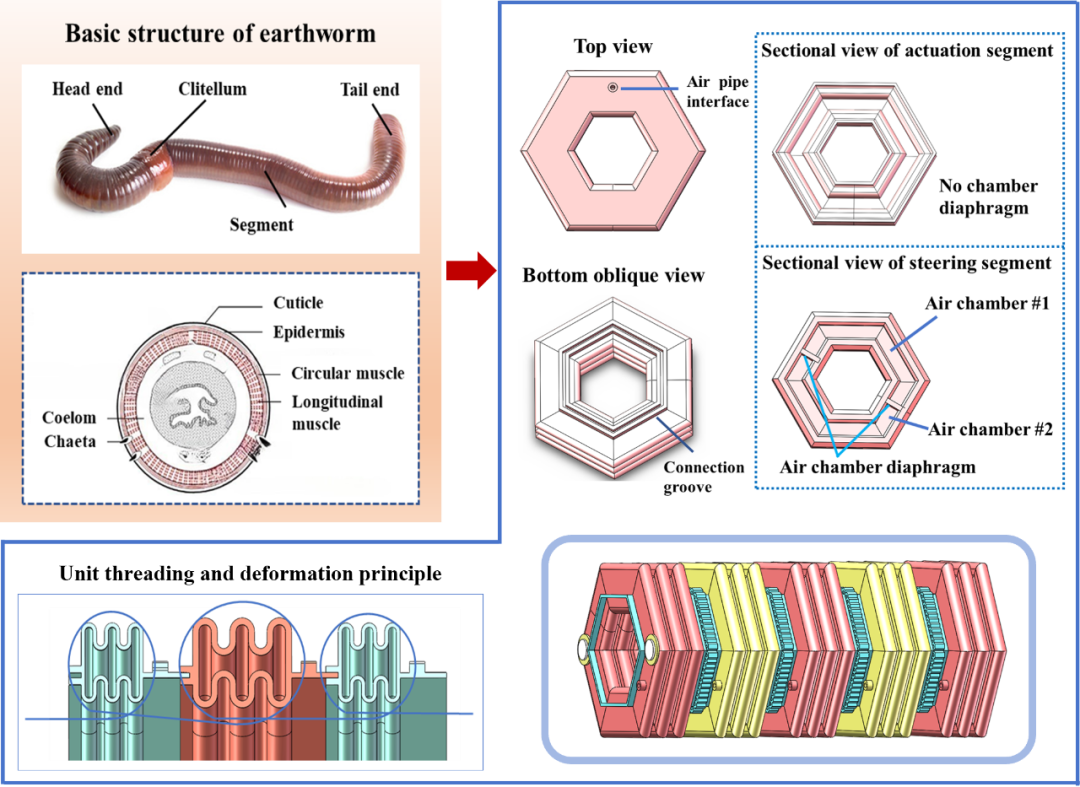
图2 仿生蚯蚓机器人的结构设计与线缠绕传动
▍避障蚯蚓是如何炼成的?
这个机器人不只会动,还很“聪明”。研究团队在机器人头部装了压电陶瓷压力传感器,就像给它装上了“触觉”。
通过传感器信号阈值判定实验,研究人员发现振动信号和障碍信号强度相差了一个数量级。
这意味着机器人能够精确分辨出什么时候是真的遇到了障碍物,而不会被普通的振动干扰所迷惑。
当机器人头部压力传感器单侧压力超过预设阈值时,控制系统就会立即反应,驱动转向节段(左右气室)充气,实现自主避障!
为了保证避障的同时还能继续前进,研究团队还特意使用了双Arduino板分别控制驱动和转向。
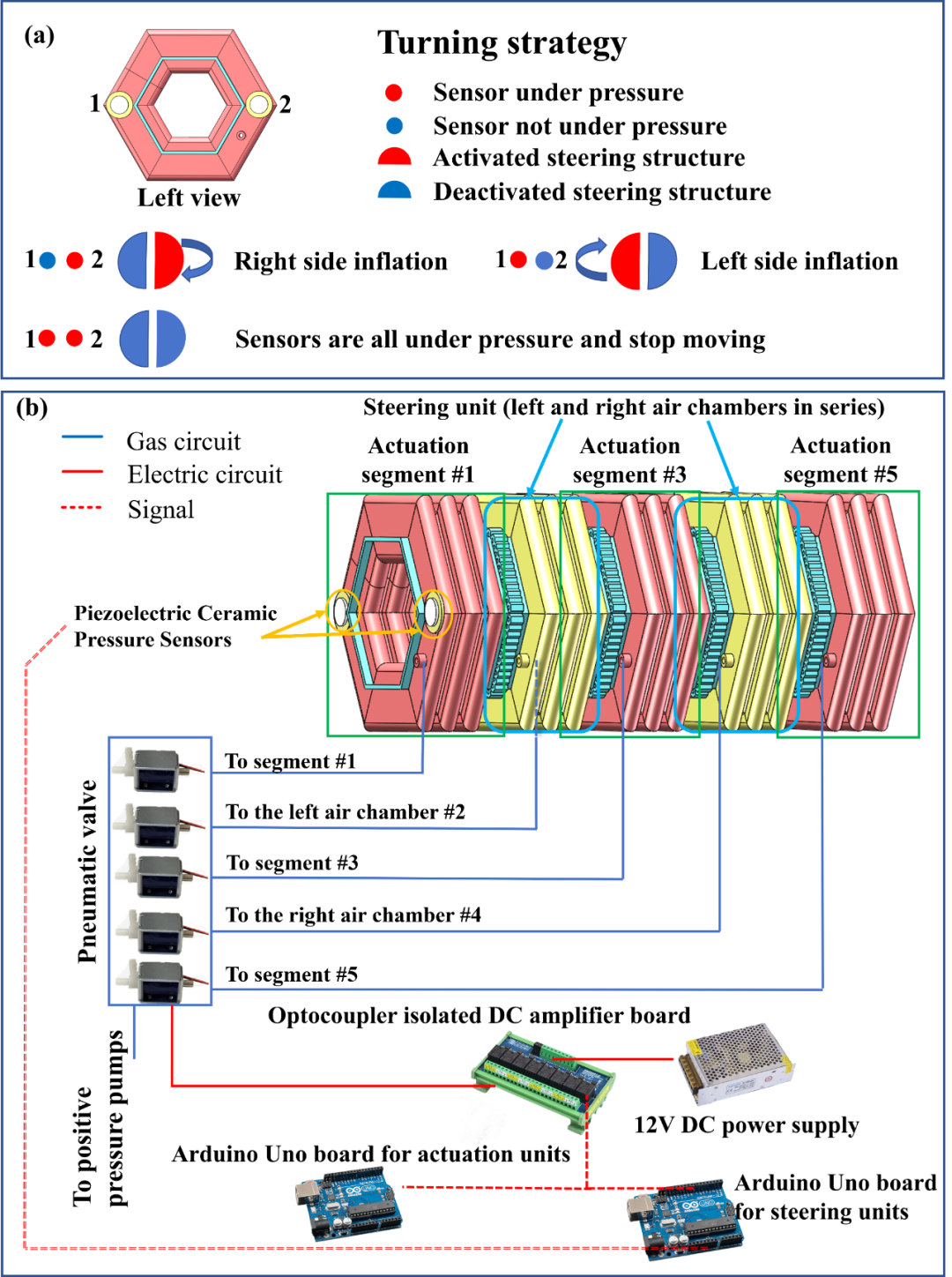
图3 机器人仿生自主避障
▍这只机器蚯蚓为什么能优于同类?
实验数据摆在眼前,让我们一起来看看这只“机械蚯蚓”到底有多强。
首先是最关键的参数:研究团队通过反复实验,确定了机器人在平面与管道条件下双蠕动波控制的最佳时间相位差为0.3秒。在这个参数下,无论是平面还是管道环境,机器人都实现了6.65 mm/s(36.0×10⁻³ bl/s)的爬行速度,这个成绩已经超越了同类仿生蚯蚓爬行机器人。
机器人避障转向实验、跨平面运动实验,验证了其多模态运动性能。通过线缠绕传动对比分析实验,进一步验证了线缠绕传动对于机器人运动性能的提升。
体节驱动压力:从20 kPa提升到100 kPa
平面运动速度:提升249.5%
管道运动速度:提升38.9%
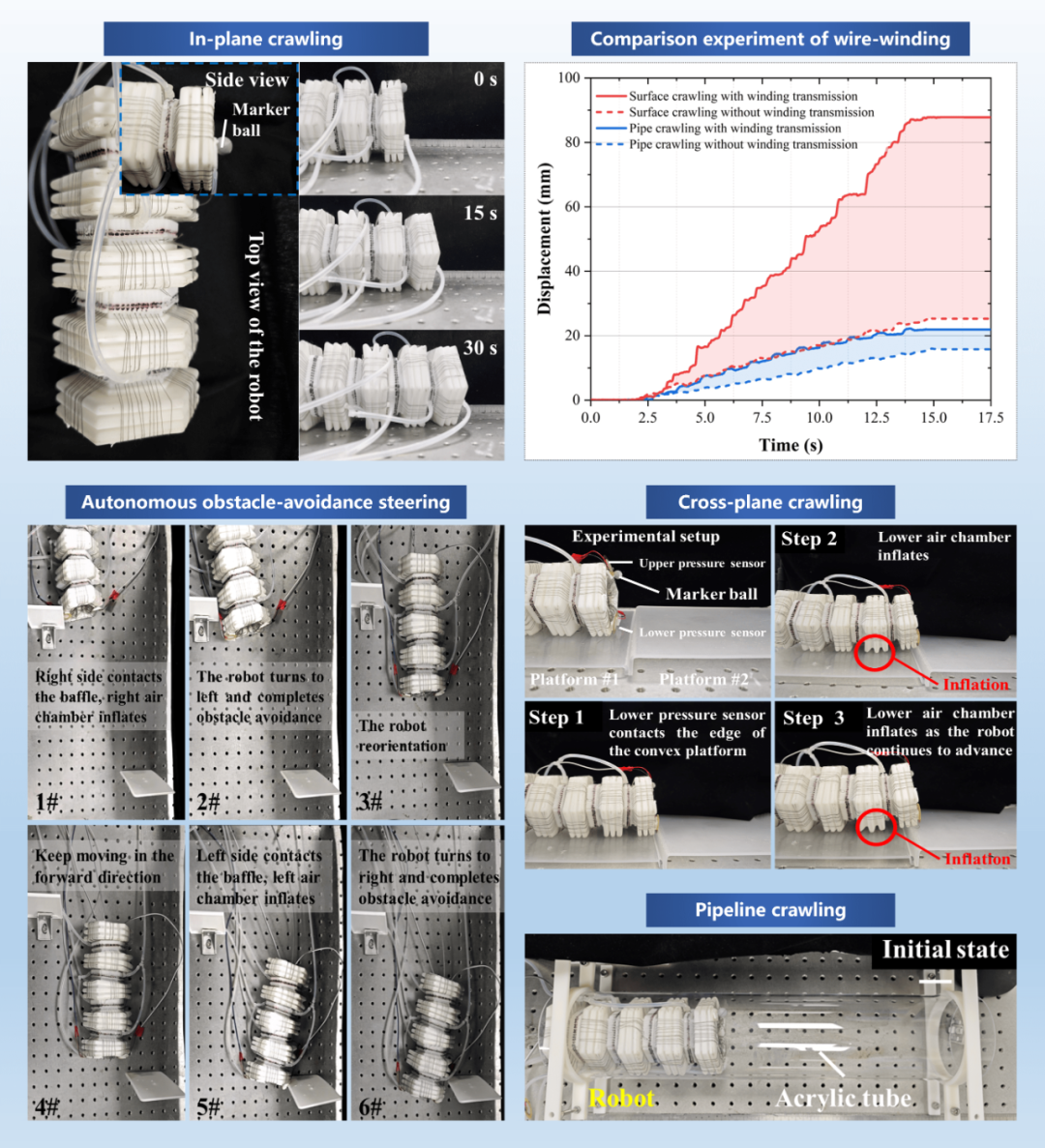
图4 仿生蚯蚓机器人实验
总结来说,机器人的平面运动、管道运动、转向运动、跨平面运动的实验结果表明了,创新的机器人蠕动波控制率、体节单元设计和独特的线缠绕传动约束方式,大幅提升了机器人的运动性能。
这项成果应用前景广阔,从工业管道检测、市政管网巡检,到医疗领域的人体腔道检测,都大有可为。
天津大学机械工程学院刘建彬副教授为论文第一作者,天津大学机械工程学院毕业生李鹏程(现就职于南京电子技术研究所)为论文第二作者,天津大学机械工程学院硕士研究生黄治瀚为论文第三作者,天津大学机械工程学院刘海涛教授为论文第四作者,天津大学机械工程学院黄田教授为论文第五作者。该论文得到了国家自然科学基金的资助。
▍参考信息
引用格式:
[1] Jianbin Liu, Pengcheng Li, Zhihan Huang, Haitao Liu, Tian Huang. Earthworm-inspired multimodal pneumatic continuous soft robot enhanced by winding transmission. Cyborg Bionic Syst. 0:DOI:10.34133/cbsystems.0204
论文链接:
https://spj.science.org/doi/abs/10.34133/cbsystems.0204
课题组信息链接:
https://www.researchgate.net/lab/Jianbin-Liu-Lab-2



