
科学家真的给人形机器人装上了喷气背包,让它飞了起来。
不是那种绑几个螺旋桨就完事的做法,而是实打实的4台涡轮喷气发动机,总推力64公斤,妥妥的硬核飞行。
更硬核的是,他们还用深度学习解决了一个让航空工程师头疼的难题:怎么让一个完全不符合空气动力学的人形机器人,在天上保持平衡?
这项研究来自意大利技术研究院(IIT)的研究团队,近日发表在Nature(全球最具影响力的科学期刊之一)的子刊Communications Engineering上。
▍为啥非要让人形机器人飞?
话说回来,让机器人飞这事儿其实不新鲜。四旋翼无人机满天飞,各种奇形怪状的飞行器也层出不穷。
但大部分飞行机器人都有个通病:为了飞得久,拼命减重,结果能力有限。要么就是专门为飞行设计,落地之后也是能力有限。
意大利技术研究院团队的思路很有意思:与其从头设计一个会飞的机器人,不如给现成的人形机器人加个飞行模块。
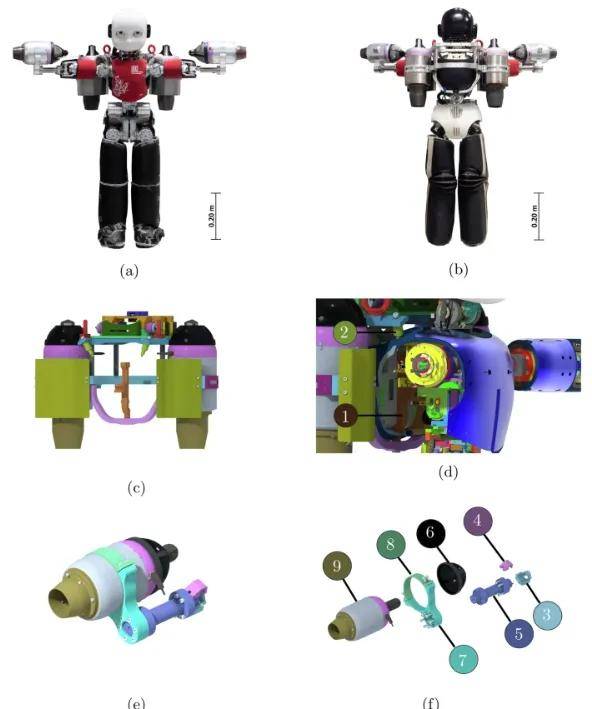
他们选中的是iCub v2.7,这可是个明星机器人,双足行走、双手操作都能实现。
改造后的iRonCub-Mk1重达43.3公斤,比原版重了10公斤。
为啥选喷气发动机而不是电动螺旋桨?团队算了笔账:40公斤的机器人飞5分钟,用电动推进需要26.31公斤电池,用喷气发动机只要4.61公斤燃料。这差距,懂的都懂。
最终配置是这样的:背上两台JetCat P220-RXi,每台22公斤推力,负责把机器人举起来;两个前臂各装一台P100-RX,10公斤推力,负责调整姿态。
有意思的是,他们把前臂的手直接拆了,换成喷气发动机。虽然少了抓取能力,但想想看,一个喷着火焰的机器人向你飞来,谁还在乎它有没有手?
▍把机器人扔进风洞,看看会发生什么
机器人造好了,但怎么飞是个大问题。
人形机器人的外形,从空气动力学角度看简直是灾难。方方正正的身体、伸出来的四肢,妥妥的空气制动器。
为了搞清楚空气到底怎么把机器人捧上天,研究团队把iRonCub-Mk1搬到了米兰理工大学的风洞里。
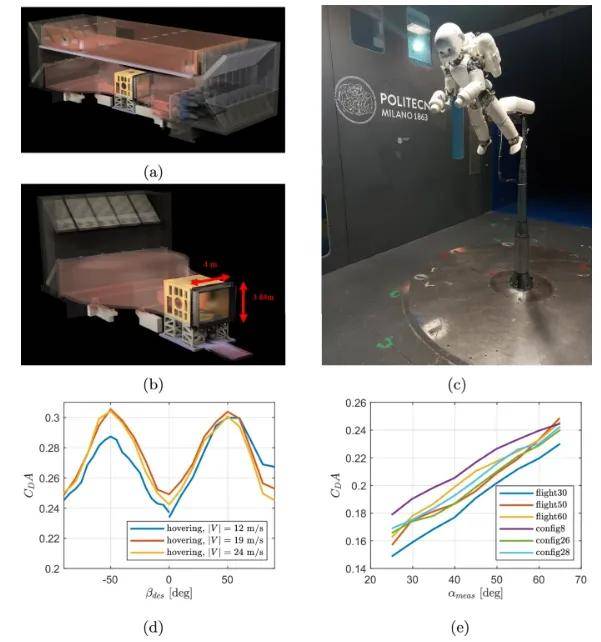
这个风洞可不简单,低湍流测试段4米×3.84米,最高风速55米/秒。机器人被固定在一个可以远程控制的支架上,能调整各种角度。
实验设计了两种场景:
悬停测试:机器人保持直立(像站着一样),测试横风的影响。
飞行测试:机器人倾斜不同角度,模拟真实飞行姿态。
为了测得准,团队在机器人身上装了124个压力传感器,还用六分量应变计测量整体受力。结果发现了几个有趣的现象:
首先,风速对阻力的影响没想象中那么大(误差小于5%),但机器人姿态的影响巨大,不同姿势能让阻力变化20%。其次,95%的阻力来自压差阻力。也就是说机器人后面形成了一个巨大的低压区,像个吸盘一样把它往后拽。
最扎心的是,测试显示机器人的空气动力学效率极低。机器人还没有针对空气动力学进行优化"。翻译一下:这玩意儿飞起来纯靠力大砖飞。
▍CFD模拟:让计算机也"吹"一遍
风洞实验虽好,但太贵了。要训练AI,需要海量数据,总不能在风洞里吹个几千次吧?
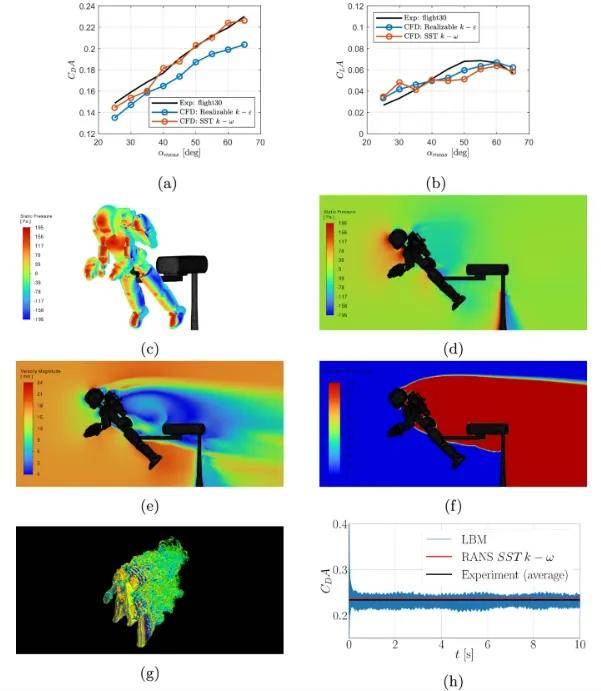
于是团队转向了计算流体力学(CFD)模拟。用ANSYS Fluent软件,求解雷诺平均纳维-斯托克斯方程(RANS),配合SST k-ω湍流模型。
但这里有个技术难题:机器人的几何形状太复杂,如果用高精度网格,一次模拟要算好几天。
研究人员很机智地做了个权衡分析:把网格从953万个单元简化到33万个,计算时间缩短了97%,但误差只增加了不到5%。
用这个"快速但不太粗糙"的方法,他们搞了个自动化框架,最终生成了8500个模拟案例的数据集:24种关节配置、19个俯仰角、18个偏航角。
为了验证准不准,团队还用GPU跑了个格子玻尔兹曼方法(LBM)模拟。两块NVIDIA A100跑了两天,误差小于1%,但这计算成本... 还是RANS香。
▍深度学习上场:让AI当空气动力学专家
有了数据,接下来就是AI的主场了。
研究团队设计了一个深度神经网络(DNN),输入是22维(风向+19个关节角度),输出是39维(13个部件的3个力分量)。
网络结构挺豪华:9个全连接层,每层1048个神经元,ReLU激活函数,还加了10% dropout防过拟合。
用PyTorch在NVIDIA RTX A4500上训练60000轮后,验证集上的相对均方误差达到了3×10^-6。啥概念?就是AI预测的空气动力,和CFD算出来的几乎一模一样。
但光有精度还不够,实时控制需要快速计算。所以团队又搞了个"轴对称模型",假设每个部件都是独立的圆柱体,忽略相互影响。
虽然精度差了一个数量级,但计算贼快,而且有物理意义,适合放到控制器里。
▍控制算法:让机器人在风中凌乱而不倒
有了空气动力模型,最后一步是设计飞行控制器。
核心思想是稳定质心动量。说白了,就是让所有外力(重力、推力、空气动力)的合力始终指向想去的方向。
研究团队在原有的动量控制器基础上,加入了空气动力补偿项。控制器会实时计算需要的推力和关节运动,通过一个二次规划(QP)问题求解最优控制输入。
仿真测试设计得很严格:机器人要完成一个包含起飞、悬停、前进、侧移等动作的飞行包线,全程都有风干扰。
结果对比相当明显:
基线控制器(忽略空气动力):机器人失去平衡,直接摔了
空气动力感知控制器:顺利完成所有动作,关节误差保持在可控范围
更狠的是鲁棒性测试。研究人员故意在模拟器里用高精度DNN模型,控制器里用简化模型,相当于让控制器"看走眼"。
结果?照样能飞完全程,就是动作有点抖。这说明啥?说明这套方案不是实验室里的花架子,真到了现实中有误差也扛得住。
▍现实很骨感:为啥还没飞上天空?
看到这你可能要问:说了这么多,离地飞是飞起来了,咋没看到真飞在天空中的视频?
研究团队也很无奈,列了一堆现实困难:
喷气发动机温度太高,有毒气体也不少,室内飞不了
室外飞行没法精确控制实验条件
机器人还没装风速传感器
iCub的手臂是缆绳驱动的,响应太慢
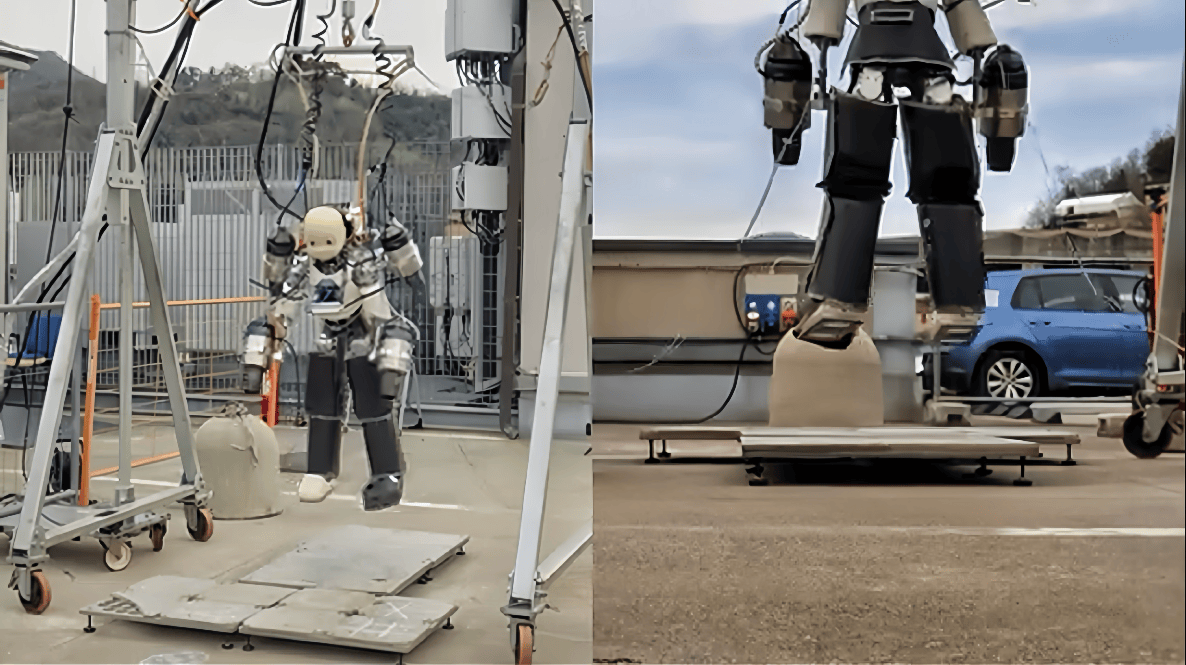
所以目前只能做地面实验:机器人站在地上,控制器里注入虚拟的风力,看它会不会正确地调整姿态。
结果还不错,面对虚拟的正面风,机器人会通过脚踝前倾来对抗;遇到侧风,会调整髋关节和踝关节来保持平衡。
虽然没真飞上天空,但至少证明了控制算法是靠谱的。
▍后续:不只是会飞的人形机器人
这项研究的意义,远不止让机器人飞起来那么简单。
从技术角度看,这是首次系统地研究人形机器人的空气动力学,建立了完整的建模、仿真、学习、控制流程。这套方法论不仅适用于人形机器人,任何形状复杂的飞行器都能用。
从应用角度看,会飞的人形机器人在搜救、勘探、基础设施检查等领域潜力巨大。想象一下,地震后的废墟里,机器人可以飞过障碍物,落地后用双手清理瓦砾,这是现有任何机器人都做不到的。
研究团队也坦诚地指出了未来的改进方向:
硬件上,需要更快的手臂驱动,集成风速传感器
建模上,要考虑非稳态效应和可压缩性
设计上,可以加装机翼或可变形外壳,提高空气动力学效率
控制上,不只是对抗空气动力,还要学会利用它
最有意思的是,他们提到未来可能会用物理信息神经网络(PINN),结合实时传感器数据,实现更准确的预测。
这就像给机器人装上了"空气动力学直觉",能预判风的变化并提前应对。
说到底,这项研究展示了一个趋势:未来的机器人不会局限于单一的运动模式。它们会走、会跑、会飞,甚至会游泳。而要实现这一切,不仅需要机械和控制的创新,更需要AI来处理日益复杂的物理交互。
从iCub到iRonCub,从地面到天空,意大利团队用实际行动证明:只要脑洞够大,工程够硬,没有什么是不可能的。
下一步,就等着看这个43公斤的大家伙真正飞起来的那一天了。到时候,可能真的要改名叫Ironman了。
更多关于人形机器人赛道深度文章可在“人形机器人发布”公众号中查看,欢迎前来关注。



