
最近,在欧洲航天局轨道机器人实验室,这个由挪威科技大学客座博士研究员 Jørgen Anker Olsen 开发和制造的四足机器人名为Olympus,正用于在模拟部分微重力和自由飞行的条件下,从一堵墙跳到另一堵墙。
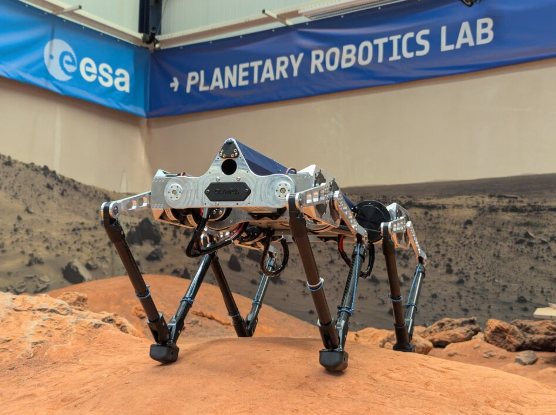
当在地面上时,机器人利用其四条“双”腿移动——每条腿由两个带有弯曲关节的肢体组成,底部以爪状的贴片连接。
在低重力环境下,它们的跳跃能力更具优势,使它们能够跳得比在地球上高得多。
这意味着,当移动探索低重力行星或月球时,腿式机器人可以像宇航员登月时一样跳跃。
Olympus被倒置安装到欧洲航天局 ORBIT 设施的浮动平台上,从而可以在两个维度上体验模拟微重力,让研究人员根更好地了解机器人在其设计条件下如何移动:火星重力,其强度约为地球重力的 1/2.5。



