
近日,中国海洋大学与北卡罗来纳州立大学合作团队在Advanced Materials Technologies 期刊发表最新成果,研发出一种全新的压电驱动与感知一体化软体机器人。这款“C形双足微型软体机器人”不仅能高速灵活移动,还能像蜘蛛一样通过“感知振动”识别周围环境,实现驱动与感知的高度融合。
机器人采用PVDF/铜双层柔性压电驱动器,结构简单、成本低廉,体长仅11毫米、重量仅0.071克,却能以42.8体长/秒的速度在高摩擦度表面疾驰,爬坡角度可达11°,还能携带3.47倍自重的负载。
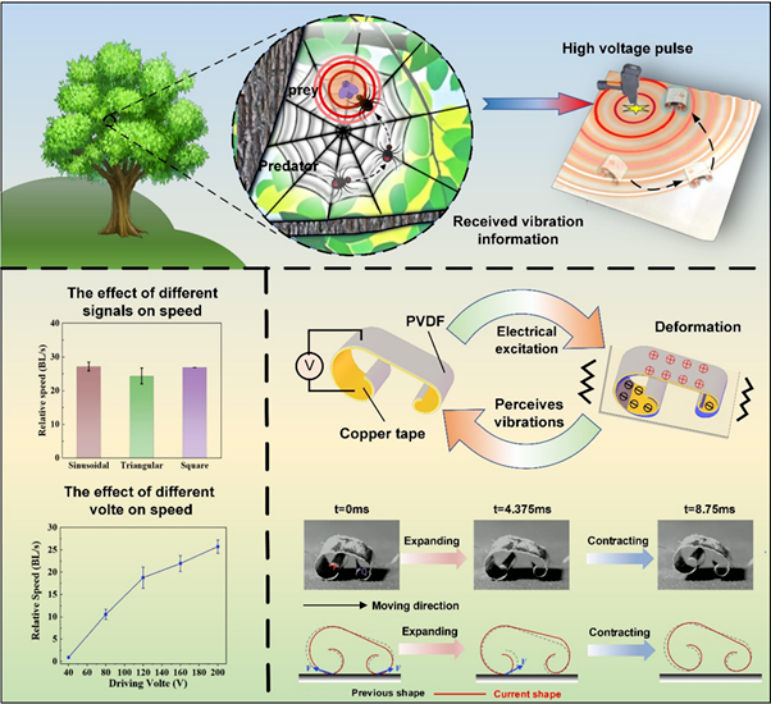
该机器人利用逆压电效应实现机械波信号感知,能够通过分析不同位置的波幅变化精准定位振源,定位误差仅4.65毫米。
这一功能让它具备结构健康监测、灾害搜救、环境探测等应用潜力,尤其适合在狭小、危险的环境中执行自主任务。



