
人形机器人等工具超越人类是必然的未来。
1909年8月22日,法国举办了人类第一届飞机比赛,贝内特杯,吸引了超过20万人,但最终飞起来的有38架,完成任务的只有9架,大部分刚开始不是散架就是飞不起来,从质疑到如今飞上蓝天,证明了工具在历史长河中的价值。
虽然从本届机器人运动会的成绩来看,距离人类极限还有一段距离,但从工业机器人的发展历程来看,未来人形机器人必然会有超过人类的一天,目前看来路径会先是计算能力(AI大模型)、体能(人形机器人),最后是综合能力(具身智能)。

▍人形机器人为何必然超越人类?
因为目前工业机器人可以轻松设计成拥有远超人类的举重能力,并且不知疲倦地连续工作24/7,在微米甚至纳米级别的操作上,机器人手臂的稳定性和精度远超人手,在特定任务(如高速分拣、计算)上,机器人的反应速度和执行速度已经开始超过人类,只是在综合指标以及集成应用中,仍然有待持续强化。
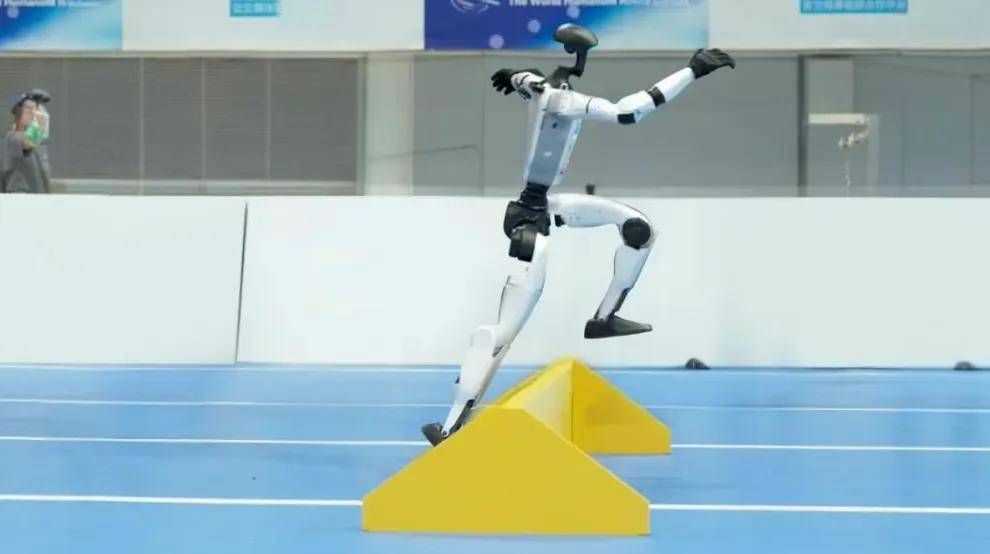
那么为什么人形机器人能在跑步、跳高等指标上赢过人类?当下的瓶颈到底在哪呢?
以跑步为例,虽然机器人都是人形架构,有“腿部”,有“脚掌”,但本质上跑步的速度取决于机械传动结构+和动力输出系统,这意味着机器人其实是凭借机械刚性控制完成了对人类生物柔性协调+的超越。
例如宇树H1在1500米中展现出的“作弊”级潜力,就主要体现在三个方向。首先H1在跑步的过程中,机械结构的天然刚性决定了它的中束不会有任何非必要晃动,几乎不存在失误。其次机器人的抬腿、摆腿速度由于主要通过电机扭矩+精确控制,其摆动接近匀速圆周运动,可通过增大电流瞬时提升扭矩,支持更快的摆腿速度,还能持续趋于极限值。最后就是人形机器人几乎无肌肉弹性带来的能量损耗,效率更高,能量全靠电池系统供应,完全不会累。
而人类就弱很多,人类为保证流畅跑步时腾空,需调动躯干肌肉双腿发力,同时维持背部中束稳定,从而实现持续跑步。但因为人类在步幅存在生理极限的情况下,不太能做到持续大跨步跑,即使调高步频,由于人类靠肌肉输出力矩,受肌肉收缩速度限制,扭矩输出存在峰值,因此人类跑步极限也非常明显。

短期来看,人体的肌肉由于在很短时间就可以从静止变为运动,也可以在很快就可以加速到一个较高的速度,短时间机器人很难实现,因为机械关节作为机器人运动的动力来源,体积塞到人形机器人关节中必然受限,小型化的同义词就是功率限制,如何能在短时间加速到一个较高的水平,就仍然需要更多努力。
但长期来看,人形机器人主要在可量化、可编程、基于规则或模式的任务上一定能够超越人类。尤其按照现有技术曲线预测,到2030年人形机器人将在爆发力、精度、耐力等所有运动维度全面超越人类顶尖运动员。这种超越不是对人类的替代,而是拓展了生命活动的可能性边界——正如起重机延伸了我们的手臂,计算机扩展了我们的大脑,人形机器人将成为人类运动能力的"外骨骼",在危险环境、太空探索等领域释放新的文明潜力。
▍减速机爆发逻辑解读
在这个过程中,精密减速机的突破无疑是一条合理路径。
精密减速机的突破之所以成为人形机器人实现运动能力超越人类的关键路径,核心在于它直接解决了人形机器人实现类人甚至超人运动性能的底层瓶颈——高精度、高效率、高刚度的力与运动传递。这一突破绝非孤立的技术进步,而是人形机器人从实验室走向实用化、高性能化的必由之路,其必要性体现在以下几个相互关联的层面。
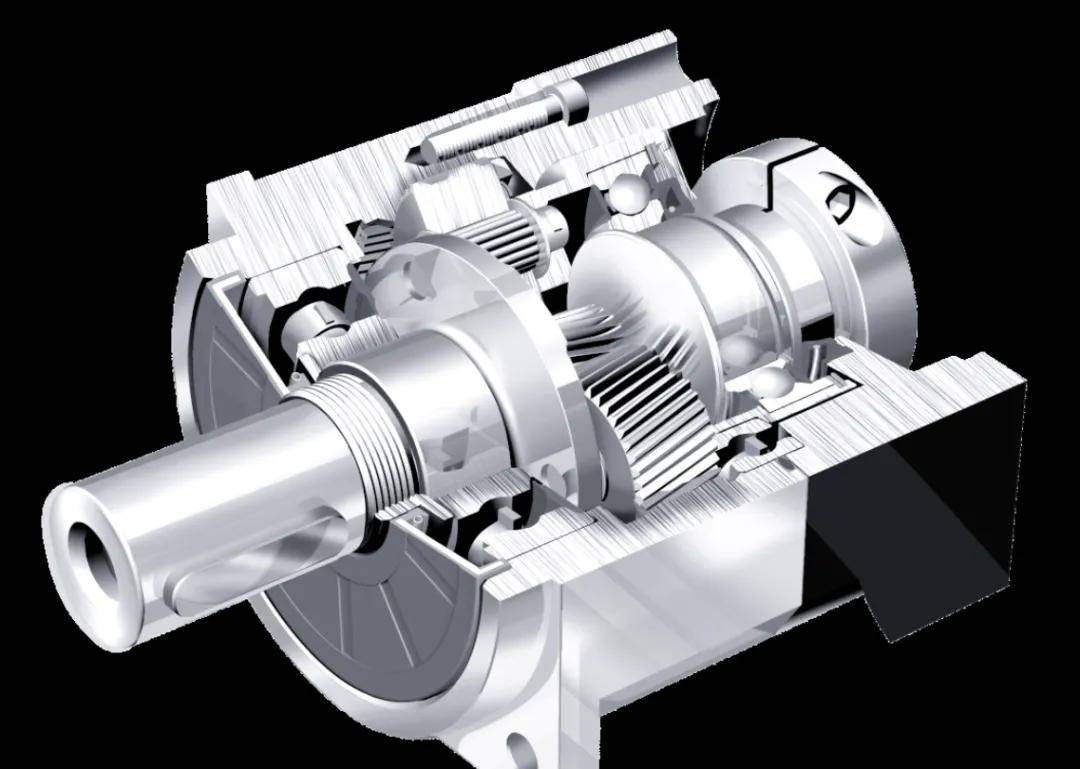
第一,它是实现类人灵巧性与超人力量/耐力融合的物理基础。 人类关节的卓越性能源于肌肉-肌腱-骨骼系统的精妙配合,能在提供可观力量的同时实现细腻的控制和快速的响应。人形机器人要模拟甚至超越这一点,其关节驱动系统(电机+减速机)必须同时满足三大矛盾需求:大扭矩输出(对应力量)、高传动精度与低背隙(对应控制精度)、紧凑轻量化(对应灵活性与能效)。精密减速机(如谐波减速机、RV减速机)的核心价值正在于此——它作为扭矩放大器,将高速低扭矩的电机输出转化为关节所需的低速高扭矩,同时以极高的传动精度(背隙极小)和传动效率(能量损耗低)传递运动和力。没有高性能减速机,电机再先进也无法直接输出关节所需的大扭矩和高精度,机器人要么笨重无力,要么精度粗糙,根本无法企及人类关节的“刚柔并济”。
第二,它是提升动态性能与运动效率的核心杠杆。 人形机器人的运动能力不仅看静态力量或精度,更看动态响应速度、协调性和能效比。精密减速机通过降低输出端的转动惯量(等效到电机轴),显著提升了关节的响应速度和控制带宽,使机器人能像人类一样快速调整姿态、应对外部扰动。同时,其高传动效率(通常>80%,远高于普通齿轮)大幅减少了能量在传递过程中的损耗,这对于依赖有限电池供电、需要长时间运行的移动机器人至关重要。低效的传动系统会导致电机过热、续航骤减,使“超人耐力”成为空谈。精密减速机的突破,是让机器人在高速奔跑、跳跃、搬运重物时,既能爆发强大力量,又能保持敏捷协调和持久续航的技术前提。
第三,它是实现高可靠性、小型化与轻量化的工程关键。 人形机器人需要在复杂多变的环境中工作,关节系统必须高度可靠、紧凑且轻巧。精密减速机(尤其是谐波减速机)以其结构紧凑、功率密度高、零件数少的特点,显著优化了关节模组的体积和重量。这对于减轻整机负载、提升动态性能、降低惯性冲击至关重要。同时,先进材料(如特殊合金、陶瓷轴承)和精密制造工艺带来的高刚性、长寿命、抗冲击能力,确保了关节在反复承受高负载冲击下的稳定运行。没有可靠、轻巧、坚固的减速机,人形机器人要么因关节笨重而步履蹒跚,要么因频繁故障而无法实用化,更遑论在恶劣环境中超越人类。
因此,精密减速机的突破绝非锦上添花,而是未来人形机器人跨越运动能力鸿沟的基石性技术。 它解决了核心关节单元在“力、准、快、轻、省、稳”等多维性能上的耦合需求,使得人形机器人能够:以超越人类的力量举起重物;以低于毫米级的重复精度进行精密装配;以更快的响应速度适应突发变化;以更轻的自重实现更敏捷的动作;以更高的能效完成长时间任务;以更强的鲁棒性应对复杂环境。只有当这些物理层面的运动能力得到根本性提升,人形机器人才有可能在特定任务维度上(如负重、精度、耐力、极限环境适应性)真正实现对人类操作者的超越,从而在工业、救援、服务乃至太空探索等领域发挥不可替代的作用。可以说,精密减速机的性能天花板,很大程度上决定了人形机器人运动能力的天花板,其突破是解锁“超越人类”这一愿景的必由之钥。
目前市场上热炒的减速机和材料公司,基本都是基于这个逻辑而来,那么接下来剩下的就是选中还没起飞的更合适的标的。
(更多人形机器人赛道深度文章,请关注微信公众号“人形机器人发布”)



