
在自然界里,植物藤蔓凭借柔韧与生长能力,穿过缝隙、攀附高处,最终抵达难以企及的地方。受此启发,机器人研究者发明了“藤蔓机器人”这一可以通过顶端外壁材料翻转实现本体延展、几乎不会产生反力的柔性机器人。

延续了植物藤蔓的优势,藤蔓机器人能够在废墟间探查生命迹象,在狭窄管道深处搜寻泄露源,也能进入传统机器人难以踏足的未知环境。此前,研究人员已成功让藤蔓机器人在城市搜救训练场地、考古遗址甚至蝾螈洞穴栖息地完成探索任务。

但这些成果大多依赖“临时参数”,即通过经验调整设计与控制变量,缺乏系统性的规律总结,导致机器人难以适应不同场景的通用需求。与此同时,由于藤蔓机器人太柔软,而在执行具体任务时其尖端又往往会加上摄像头、传感器等负载,其操纵性即通过可控曲率实现机动的能力在现实应用中会受多种因素制约,进而对其现场作业效果和应用范围产生严重影响。
▍聚焦操纵性瓶颈,解密操纵性的关键变量
一般来说,藤蔓机器人操纵性主要受3大因素影响:其一,顶端负载的影响。传感器、探测工具等设备的重量会改变机器人的结构受力和控制需求,过重的负载可能导致机器人无法维持预定曲率,甚至发生坍塌;其二,设计与控制参数的模糊性。机器人的腔压、长度、直径、执行器制作方式等参数如何影响操纵性,长期缺乏定量研究;其三,环境适配性差。在无支撑的自由空间(如跨越空旷区域)和地面支撑场景中,机器人的受力状态差异显著,现有设计无法兼顾两种场景的操纵需求。
针对以上藤蔓机器人的主要操纵性瓶颈,来自美国圣母大学和麻省理工学院林肯实验室的研究团队开展了专项研究,聚焦采用串联袋式电机气动执行器的藤蔓机器人,通过两组实验系统分析了顶端负载、腔压、长度、直径、制作方式及执行器与腔压比对操纵性的影响,并验证了优化参数后的机器人在实际任务中的性能提升。
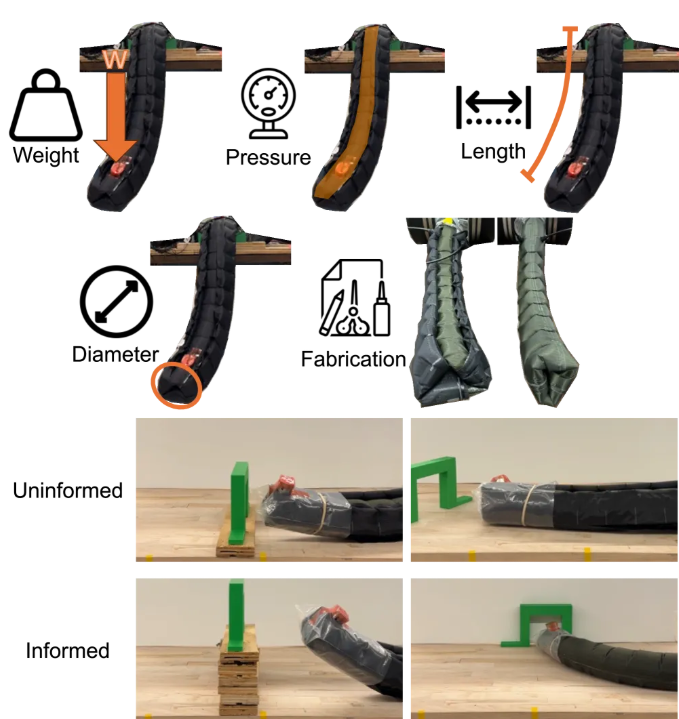
以建立“设计-控制-操纵性”的定量关系为核心目标,研究团队在进行实验时,一方面明确在无支撑的三维空间中,顶端负载、腔压、长度、直径如何影响机器人的曲率控制;另一方面探究地面支撑场景下,执行器制作方式(外部附着与集成式)及压力比对平面曲率的作用规律。最终,通过实验结果提炼设计与控制准则,让藤蔓机器人摆脱“临时参数”依赖,实现可推广的操纵性能优化。
该研究不仅填补了藤蔓机器人操纵性定量研究的空白,更为实际应用提供了可落地的技术方案。通过系统性实验,研究团队首次明确了顶端负载、腔压、长度、直径、执行器制作方式及压力比对藤蔓机器人操纵性的影响规律,将藤蔓机器人的设计与操控从“经验驱动”推向“数据驱动”。工程师可根据具体任务需求(如搜救、勘探、检测)定制机器人设计,大幅降低调试成本,提升机器人在复杂环境中的可靠性。
▍自支撑三维可操纵性实验
在复杂环境中,藤蔓机器人常需在无外部支撑的情况下自主移动,例如跨越断裂楼层或穿过悬空通道。这类场景要求机器人同时具备抵抗重力的能力与可控的弯曲转向性能。为系统评估其自支撑状态下的操纵特性,研究团队设计了三维可操纵性实验,重点分析顶端负载、腔体压力、机身长度和直径四个参数对机器人运动性能的影响。

实验采用的藤蔓机器人主体由30旦尼尔可热封TPU涂层防撕裂尼龙织物制成,包括一个主腔室和三个沿圆周分布、沿长度方向附着的外部袋式执行器。机器人被水平固定于桌面边缘,形成悬臂结构,使其末端在自由空间中运动。通过闭环压力调节器精确控制主腔室与执行器内部气压,并利用运动捕捉系统实时追踪末端标记点的三维轨迹。所有数据均以机器人底座为坐标原点进行对齐,以准确反映其在实际空间中的运动状态。
为量化机器人的操纵性能,研究团队提出“特征长度”作为评估指标。该指标通过将机器人末端运动轨迹投影至水平面,计算其形成的凸包面积后取平方根得出。同时,水平方向与垂直方向的移动范围也被记录,共同反映机器人在不同参数下的曲率控制能力。
顶端负载
在顶端负载实验中,机器人主腔压设定为6.89kPa,长度为0.61米,直径为8.1厘米,负载从0克逐步增加至200克。结果显示,随着负载加重,特征长度逐渐下降,超过100克后下降趋势尤为明显,水平与垂直移动范围也同步缩减。这表明负载增加会显著限制机器人的弯曲能力,使其难以在重力作用下维持预期路径。
腔体压力
腔体压力实验在固定负载50克条件下进行,压力从2.07kPa逐步提升至10.34kPa。研究发现,特征长度随压力升高呈现先增后减的趋势,在5.52kPa时达到峰值。较低压力下机身刚度不足,难以形成稳定曲率;而压力过高则导致机身过度刚性,执行器无法有效驱动其弯曲。水平移动范围随压力上升整体收窄,垂直移动范围则因刚度与执行器力量的相互作用呈现波动状态。

机身长度
机身长度实验表明,在0.30米至0.76米范围内,更长的机身能够扩大特征长度与水平移动范围,这是由于相同曲率下末端位移随长度增加而增大。然而,垂直移动范围随长度增加而减小,反映出更长机身对抗重力的能力下降。研究人员指出,需在灵活性与结构稳定性之间取得平衡,过度延长可能导致机身坍塌,使操纵性能急剧恶化。
直径
直径实验结果显示,除3.2厘米直径因结构过细发生坍塌外,其余各组直径(6.5厘米至12.9厘米)对特征长度与移动范围均无显著影响。这表明直径参数在满足抗坍塌需求后,对操纵性能的影响极为有限,设计时应以实际应用场景的空间限制为主要考量。
▍支持的平面可操纵性实验
在平坦的搜救现场或考古遗址地面等地面支撑场景中,藤蔓机器人无需对抗重力维持悬空姿态,此时执行器的制作方式和压力比成为影响操纵性的关键因素。研究团队通过平面弯曲实验,系统比较了外部袋式与集成式两种执行器设计的性能差异,并分析了执行器压力与主腔压力比值对机器人曲率的影响规律。
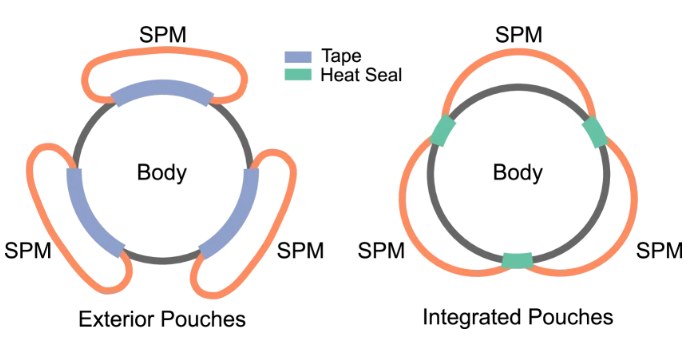
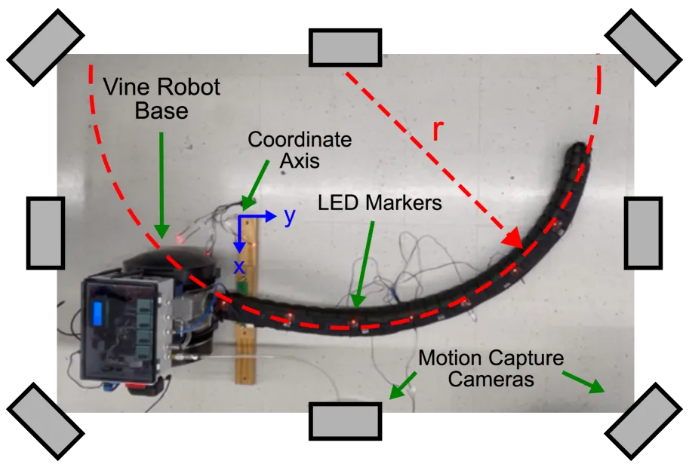
实验所用机器人主腔直径统一为7.6cm,长度1.75m,放置于地面以消除重力影响。两种执行器在设计上具有明显差别:外部袋式执行器先单独制作三个串联袋式电机,再用胶带固定在主腔外侧;集成式执行器则将主腔与执行器作为双层结构一体制作,通过热封折叠织物同时形成主腔壁和内部袋式腔室。
压力比
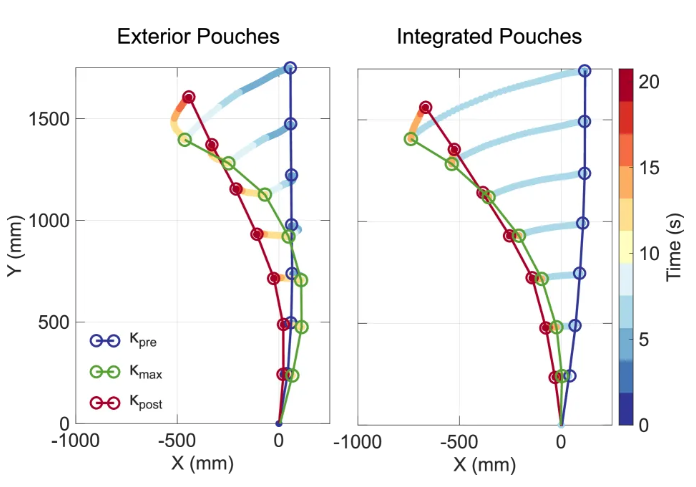
通过独立调节主腔压和执行器压力(范围3.45-13.79kPa,增量3.45kPa),研究团队得到压力比(执行器压力/主腔压)0.25-4.0的不同工况。利用运动捕捉系统追踪机器人中心线上每隔25cm的LED标记,通过最小二乘法拟合顶端轨迹的圆,以曲率(圆半径的倒数)量化操纵性,每个工况重复3次以确保数据可靠性。
实验结果显示,无论采用哪种执行器,机器人的曲率均随压力比升高而增大。这表明执行器压力相对主腔压力越高,对机器人产生的推动作用越强,越容易形成弯曲变形。

制作方式
两种执行器在设计特性上表现出明显区别。外部袋式执行器具有低压力比启动的优势,在压力比小于1时即可开始弯曲。然而随着压力比继续升高,其曲率增长逐渐放缓并趋于饱和,难以实现较高曲率。集成式执行器则需要压力比超过1才能开始弯曲,但一旦启动,曲率随压力比升高呈现近似线性增长,最终能够达到远高于外部袋式执行器的最大曲率。
这种性能差异主要源于环向应力的影响。当主腔加压时,腔壁处于环向拉伸状态。集成式执行器与主腔壁共享同一结构,需要克服腔壁的预拉伸力才能膨胀弯曲,因此需要更高的压力比才能启动。而外部袋式执行器与主腔壁机械分离,无需对抗环向预拉力,故能在较低压力比下启动,但主腔壁的拉伸状态也会限制其进一步膨胀,导致曲率增长出现饱和现象。
实验过程中,研究团队还观察到非复位现象:两种执行器在充气弯曲后,放气时均无法完全恢复至初始直线状态,存在明显的滞后和残余变形。这一现象主要由材料弹性和层间摩擦导致,对机器人的重复定位精度可能产生影响,需要在后续设计中予以优化改进。
▍藤蔓机器人的设计、制作与操控建议
基于自支撑三维实验与平面支撑实验的系统研究,研究团队总结出一系列藤蔓机器人的设计、制作与操控准则。这些准则旨在为工程实践提供理论依据,帮助开发者根据具体任务需求优化机器人性能,减少对经验性参数的依赖。
在机器人结构设计方面,首先需要确定那些受任务环境约束的参数。直径参数应以抗坍塌为核心标准,无需过度追求尺寸。长度参数需要在灵活性与稳定性之间取得平衡,在不超过坍塌临界值的情况下,增加长度有助于提升机器人的操纵范围,但较长的机身能够在相同曲率下产生更大的末端位移,这在需要大范围扫描或跨越障碍的任务中尤为重要。实际操作中,可通过分段生长策略来维持结构稳定,即先生长至某一长度并稳定后,再继续延伸。顶端负载的优化则应遵循最小化原则。负载重量与操纵性能呈负相关,特别是在超过100克后性能下降明显。建议优先选用轻量化传感器与执行机构,并考虑采用模块化设计,使操作者能在需要高机动性的任务阶段卸除非必要负载。
执行器的制作方式选择应基于任务所需的压力比范围。外部袋式执行器在低压力比条件下具有优势,适合那些需要维持较高主腔压力以支持生长或抗坍塌的应用场景。集成式执行器虽然需要更高的压力比才能启动,但在支撑良好的环境中能够实现更大的最终曲率,适合对转向精度要求较高的平面任务。
在操控策略方面,不同应用场景需要采用相应的压力配置。自支撑三维场景推荐使用中等主腔压力,通常在5-7千帕范围内,以平衡结构刚度与转向灵活性。平面支撑场景则应优先提高压力比,通过降低主腔压力或提高执行器压力来获得更大曲率。
针对当前材料技术对压力上限的限制,研究团队提出生长与转向分阶段协调控制的策略。在生长阶段维持较高的主腔压力以确保延伸速度,到达目标区域后转为转向阶段,此时降低主腔压力并提高执行器压力以获得最佳操纵性能。这种交替工作模式能够有效扩展机器人的应用范围。

基于上述经过实验验证的设计、制作与操控准则,研究团队开发了两台新型藤蔓机器人,并成功完成了以往在参数未经充分优化的情况下难以实现的任务。每台机器人均执行了两项对野外环境探索至关重要的任务:一是将机器人末端抬升以跨越高度变化,二是实现高曲率转向。
在第一项任务中,机器人在给定负载与参数配置下尽可能提升末端高度,其最大抬升能力以绿色拱门作为视觉标识,机器人需能够穿过该拱门。在第二项任务中,机器人先延伸至一定长度,随后弯曲至其最大平面曲率,该弯曲路径同样以一个绿色拱门表示,用于评估机器人转向后的可达性。
实验结果显示,采用优化准则的机器人在性能上均有明显提升。例如,在将末端负载从150克减轻至100克,并将压力比从1.0提高至4.0后,机器人的转向角度从22度增加至68度,抬升高度也从2厘米提升至12厘米。这些改进验证了系统化参数优化在提升藤蔓机器人任务性能方面的实际价值。
▍关于未来
未来,研究团队将重点解决“非复位现象”带来的操纵精度问题,探索低滞后材料和proprioceptive传感技术(通过传感器实时检测机器人形状,补偿残余变形);同时,研发更高压力耐受的执行器制作工艺,突破当前压力上限,实现“快速生长”与“高曲率转向”的同步优化。
随着相关技术的成熟,藤蔓机器人将有望在城市搜救、考古勘探、工业检测等领域发挥更大作用,成为复杂环境中“灵活可靠的探索者”。
参考文章:
https://arxiv.org/html/2510.22504v1#S6



