
对于人形机器人,人们脑海里固有的是机械、呆板的印象,而福德机器人在首届中国人形机器人产业大会上带来的这款43公斤、71个关节的“天链人形机器人T1”却尽显轻柔,甚至能做一些劈叉、一字马、跳跃等高难度动作,旋转、压腿更不在话下。

机器人大讲堂了解到,在形态层面,天链人形机器人T1高度模拟人体骨骼结构,全手掌具备15个自由度,单手指3个自由度,高度还原人类手指灵活性。在运动功能层面,T1具备人类的外形特征和形体表达,高度模拟人类动作,这使其在活动范围层面基于高拟人形态设计,髋关节-25°~142°,膝部关节:-10°~155°,腰部关节左右范围±45°,腰部关节前后范围±90°,处在国内领先地位。
从减速机企业转向开发人形机器人整机,在机器人大讲堂的专访中,四川福德机器人股份有限公司(川机器人,835015)董事长胡天链为我们详细解读了对于两者共性技术的探索和思考。
▍从减速机到人形
胡天链用“回归梦想”一词来形容福德机器人目前的人形机器人研发举动。
在福德机器人内部,人形机器人与协作机器人核心关节的研发其实在2016年就已经开始,当时福德机器人申请了关于“超轻量一体化关节”的两项重要发明专利,并在2018年获得授权。
基于工业自动化集成领域十多年的经验,在看到这种小体积、轻重量但具有高输出密度力矩产品的技术潜能后,福德机器人认为,未来民用和商用的机器人,必然也需要对机器人的外形、重量、体积和安全性等指标提出特殊的要求,这就使得超轻量关节有望成为机器人新兴的关键核心零部件,梦想和现实开始有了交汇点。
福德机器人创始团队中,胡天链等四位核心创始人都是AI专业背景出身,但因为最初创业的实际问题,福德机器人最终成长为一家零部件企业。如今,伴随着这几年企业的快速成长,团队在这样一个产品和技术的契机下,在几轮的内部定位和方向讨论中,福德机器人决定开始从传统的核心零部件厂商形态,逐步扩大到机器人整机,方向所选择的就是协作机器人、复合机器人与人形机器人。此举正是福德希望能尝试探索最初“致力于让机器人进入生活每一个领域”的创业理想,进一步提升企业价值。
挖掘、拓展核心共性技术是这轮转变中福德机器人所抓紧的重点。福德机器人发现,机器人的灵活度与人体活动的原理非常类似,关节都扮演着重要作用。人形机器人身上明确命名的关节大约是78个,而市场上大多数人形机器人的关节数量仅在40个左右,这就局限了人形机器人的许多肢体动作。
为了让人形机器人产品更加拟人化,福德机器人决定瞄准了全身71个自由度的机器人,加入更多的人形机器人关节,以满足真正灵活性的要求,并希望以这种1米6女性身材的娇小体型,来约束人形机器人的设计,从而在后续迭代过程中带来更多技术的向下兼容性。
(人形机器人)
确定了构型和硬件,在接下来探索的过程中,福德机器人却意识到,许多原先标准化的工业关节其实很难实现直接复用。除了传统关节的功率密度、扭矩密度不够的问题,部分传统结构也并不满足人形机器人的设计,这些问题交叉构成了更复杂的工程难题。
凭借在多年减速机零部件开发的过程中积累的正向研发经验,福德机器人下决心在人形机器人的开发过程中,尝试针对人形机器人的需求和架构,从上到下重新进行对于包括减速机和轴承等关键部件的设计、调整和改进,来适应对人形机器人关节的要求。
如今,在这条路线上,福德机器人已经探索了2年左右,反复迭代了5个方案,才有了天链T1这个能够满足人类大部分憧憬的强大人形机器人。
▍拓扑优化的魅力凸显
关节硬件路线选择是福德机器人在探索人形机器人过程中所遇到的一大关键问题,也考验团队的判断力和执行力。在人形机器人关节路线上,目前已经涌现出了行星、谐波、摆线轮、直线驱动、滚珠丝杠、行星矢量等多种技术路线。而福德机器人基于对多路线的对比,最初所选择的是旋转关节路线。
之所以确定这条路线,是因为其考虑到,人形机器人的方向依然是高度仿人。这意味着除了需要具备人的力量和速度之外,还需要考虑到人形机器人的灵活性。为此,福德机器人优先排除了角度范围受限的直线驱动器方案,与此同时,基于多年对于谐波减速机的研发和拓扑优化,福德机器人认为旋转关节高扭矩密度的特性依然还有拓展空间,因此尝试在人形机器人关节的基础上,尝试加入神经基层结构,试图更好发挥回转关节的优势。
目前看来,这一方案的可行性表现优越。通过对减速机、电机、驱动编码器等结构优化研发,福德机器人已经创造性地将伺服电机内嵌于减速机内部,并且优化了减速机扭矩、刚性、润滑与效率,提升了伺服电机功率密度、编码器小型化等部件输出密度。
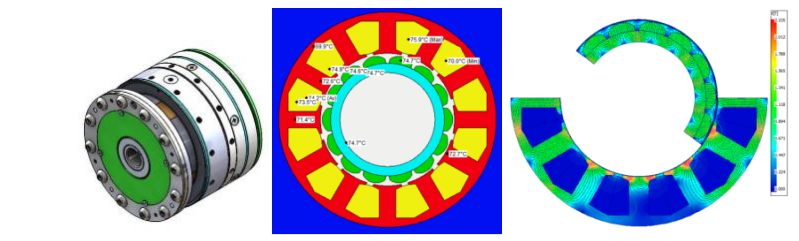
(一体化关节及内部电机仿真图)
据悉,福德人形机器人关节最大扭矩达到450Nm,瞬间极限指标可以达到562Nm,膝部关节最大扭矩达到了281Nm,脚踝关节最大扭矩达到148Nm,还有一个44Nm的垂直踝关节和127Nm的垂直髋关节输出,使得单条腿的最大扭矩输出总和达到1162Nm。
之所以能实现如此高的输出扭矩,则是因为福德机器人做了较多结构拓扑优化的工作。例如在谐波减速机方面,福德机器人结合减速机的齿形运动空间路径,在齿廓、齿向进行了3D优化,形成自主知识产权的RS圆弧3D齿形,通过表面纳米强化润滑技术,提高了耐摩擦磨损性能,通过柔轮疲劳寿命优化设计、优化柔轮材料以及热处理工艺,则进一步实现了谐波减速机微型化研发,提高了减速机承载扭矩与刚性。
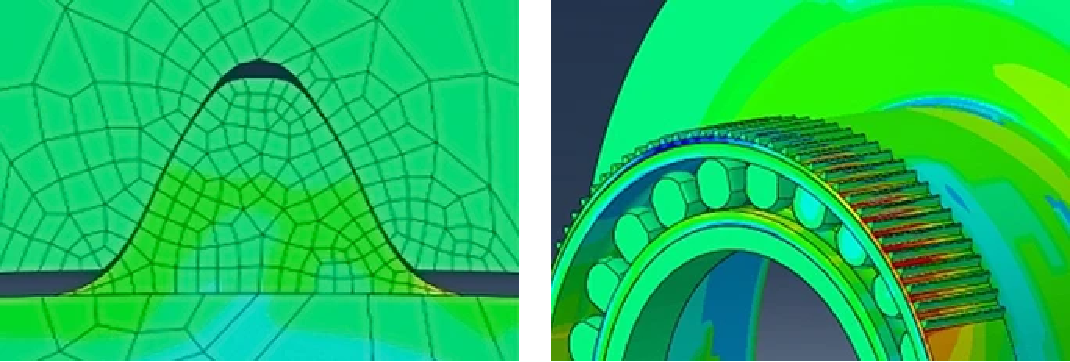
(齿形仿真与应力接触仿真)
就成绩来看,在例如一体化关节伺服驱动器研发方面,福德机器人已经优化了设计驱动器电源树,还优化了电机控制算法,从而实现高精度驱动、参数在线辨识,高速总线通讯,故障自诊断和容错控制等。
例如在内嵌式伺服电机结构设计方面,福德机器人则基于磁场优化、定子绕组优化、转子惯量优化、结构拓扑优化,提高了电机扭矩密度,降低了转子惯量,并创造性地提出内嵌式伺服电机结构,将电机及波发生器巧妙结合,零件数量得到精简,可靠性进一步增强,大幅缩小产品体积和重量,获得高扭矩密度爆发能力,关节最大扭矩密度得到极大提高。
从实际指标来看,单腿最大扭矩输出总和1162Nm的参数,意味着福德机器人实现的人形机器人电动一体化关节组件,在最大扭矩重量密度、最大扭矩体积密度、高爆发输出等指标上已经达到国际领先水平,可以说将人形机器人一体化关节的小型化、轻量化指标带入行业新的高度。
▍结语与未来
截至2024年,福德机器人已在机器人相关领域获得发明专利50余项,其中人形机器人相关专利超过20项,公司总专利及软著超过150项。而福德机器人董事长胡天链认为,即便目前已经实现较高的零部件突破,但零部件的结构还有很大优化空间,能为人形机器人带来更大提升。
例如部分企业正在大量地采用高强度复合材料,使零部件具有更高的强度、更好的疲劳寿命,更好的加工性能,从而综合提升减速机的性能。同时,在减速机方案、一体化关节结构设计等方面依然存在较大的提升空间,国外波士顿动力新一代Atlas等产品已经证明了这条一体化关节路线的可能性,也为国内多家厂商提振了信心,福德机器人也正朝着这些方向在持续努力。
胡天链透露,作为上市公司,在现阶段福德机器人公司正全力支持人形机器人研发,未来也计划快速推动企业与市场上更多合作伙伴和高校科研院所共同合作。同时,在人形机器人硬件系统技术、高集成高功率密度关节组件技术、人形机器人整机制造技术的基础上,福德机器人还将加快研发人形机器人软件系统技术、跨模态感知与人机自然交互技术,进一步补齐人形机器人具身智能感控技术(“大脑”)、人形机器人全身运动控制技术(“小脑”)的拼图,期待朝着梦想再次迈出一大步。



