
人形机器人的应用场景目前仍然正在探索期,一部分企业专注于提升人形机器人本体的能力,另外一部分则开始聚焦于应用场景的需求,致力于通过人形机器人探索,打开新的落地空间。

灵心巧手(北京)科技有限公司就是这样一家探索人形机器人进入养老领域的企业,在机器人大讲堂的专题采访中,灵心巧手公司提出了对于人形机器人在养老服务和医疗领域商业化的全新理解。(灵心巧手将参加6月6日举办的2024中国人形机器人开发者大会暨第三届张江机器人全球生态峰会,欢迎到场交流)
灵心巧手CTO周永认为,人型机器人存在多样性,虽然在移动灵活性和环境适应性方面优势较强,但针对助老服务和医疗康养领域,或许人形机器人并非一定需要双足,安全性才是这些领域人形机器人优先级最高的考量。
▍人型机器人存在多样性
应用场景的实际情况是灵心巧手所考虑人形机器人落地的基本要素,周永认为,人形机器人进入家庭和社区,必然首先需要考虑用户的活动范围和实际情况,在不同应用场景交替的过程中,轮式机器人和双足等其他形式机器人各有实用和经济价值,这让人形机器人的产品必然存在多样性。
聚焦养老领域后,灵心巧手分别考虑了人形机器人的外观设计、交互安全性、功能性三大核心点,目前已进行已经形成了独特的产品、技术逻辑线。
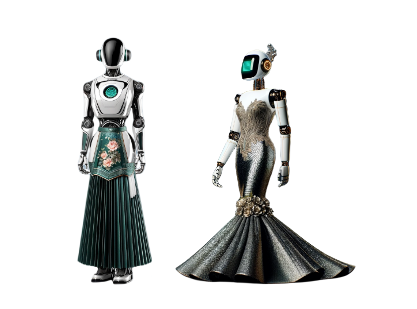
由于人形机器人服务老人,需要考虑产品的外观美观度,“惊艳”、“眼前一亮”是灵心巧手希望人形机器人能够带来的直观感受。这意味着人形机器人在面部表情、身体姿态等方面,不能够类似机械,而是需要进行综合设计。同时,为了让这类人形机器人外观符合老人的需求,融合不同地方传统文化特色,灵心巧手尝试采取定制性服务,这也是目前业内首家能够支持人形机器人外观定制的企业。

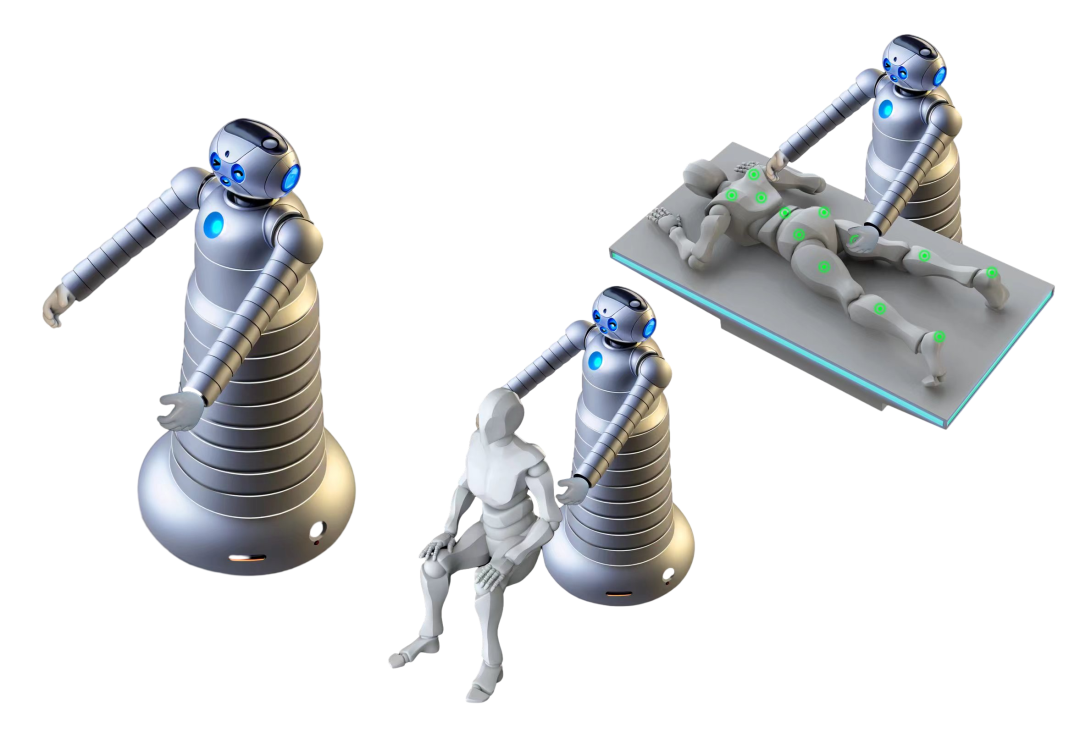
光有外观设计还不完全够,人形机器人需要在进行外观构型美观度优化的同时,注重设计的合理性。灵心巧手考虑到,人形机器人未来与老人的交互可能带有“扶拉”等实际需求,这意味着在肢体的设计上,不仅要考虑减少尖锐倒角,还需要防止一些外露部件刮伤、夹伤老人。而这又必然要求在机构设计的过程中,适当减少零部件的速度冲击力,提高整体柔顺性和关键部位的减震效果。为此,灵心巧手针对养老场景,重点研发了人形机器人主动柔性控制和被动柔性控制的方法,通过柔性算法和柔性机构的融合,目前已经在人形机器人上实现了较好的安全特性。
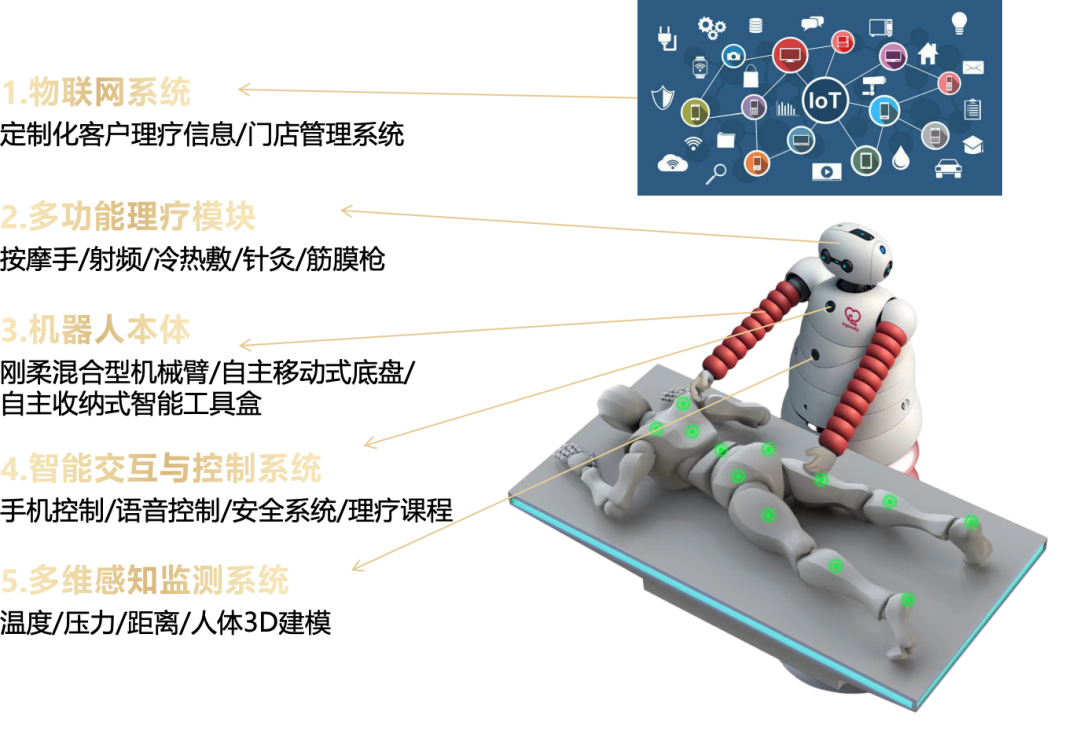
功能性则是灵心巧手考虑的另一细节。由于养老领域人形机器人大多使用场景集中在居家康养与陪伴,这对于按摩保健、健康管理、情感陪伴等实际功能其实提出了较为强烈的要求。灵心巧手的人形机器人,就针对性开发了三大块核心功能,即个性化情感陪伴、日常生活辅助、健康管理。

个性化的情感陪伴主要服务于老人的日常交流沟通,日常生活辅助主要用于老年人日常穿衣起床等一些日常辅助,健康管理则是针对老人的健康状态,进行实时心率、血压、血糖等关键指标的安全监测和报警功能,整体实用性非常强,而这也有望进一步增加人形机器人的附加值,最终提升走入家庭生活服务的可能性。
▍技术基底解析
在这套人形机器人产品落地到实际场景的过程中,仍然面对较高的使用难题,核心在于前文所提到的场景问题。由于人形机器人在助老、康养等领域,直接与人体进行各类动作。例如养老中医场景进行智能化感知与交互,这意味着硬件上,机器人实现柔性控制,必然需要有一定的智能性,而这大多首先需要较高的数据样本支持,从而才能保证机器人的技术特征具有一定的可靠性和极致安全性,这对于机器人硬件的采样能力以及数据处理能力有着较高的要求。
同时,由于老人群体的情感陪护,大多数场景都极具个性化,人形机器人的陪护方案,必然要求大数据和中医理论进行一定融合,从而才能设计出一套健康管理和康复训练服务。目前为了采集到足够稳定的样本数据,灵心巧手正通过与专业中医机构和知名专家合作,共同针对老人形成专业方案,并基于人工智能,在硬件上加入视觉、触觉、听觉三方面传感器的技术,进行数据采集、预处理和清洗、训练,提升整体场景方案的个性化,目前已经能为各类人群制定一套完整的康复训练、管理方案。

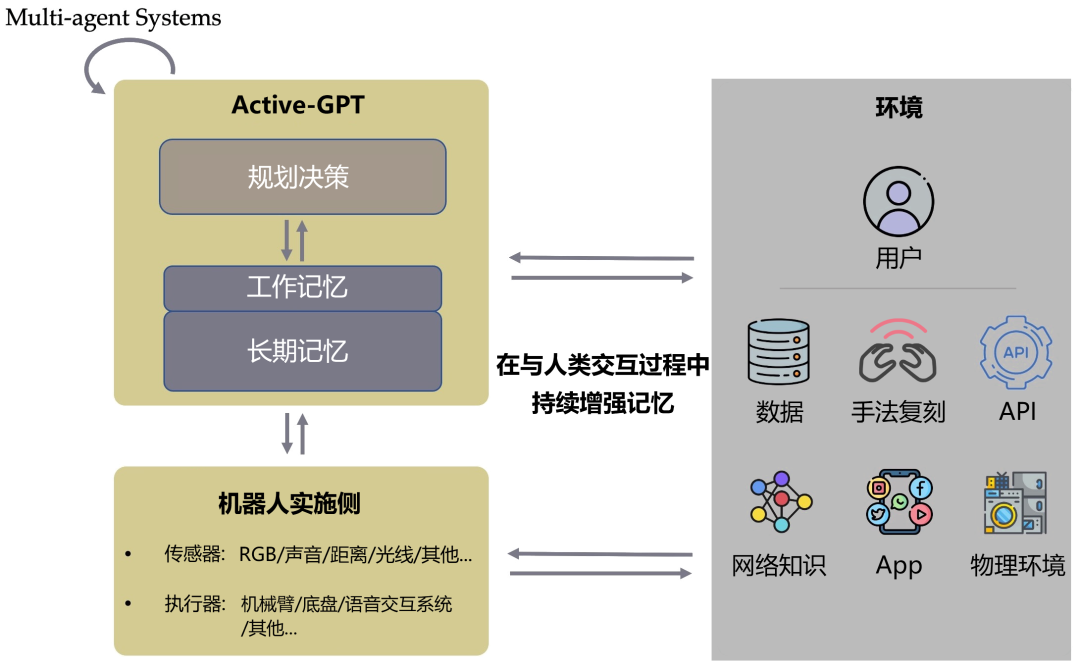
除了方案制订,在实际机器人的动作执行中,如何保证机器人能够对人类语言进行端到端的逻辑解析和行为动作输出,就需要大模型和神经网络架构的搭建。为了突破这一技术难题,目前灵心巧手设计了一种云边端的结构框架,该架构将机器人决策的大脑放在云端,并在边缘侧小脑和肢体控制层面,通过多传感器部署,实现较好的及时性控制。
由于云端大脑负责较高层次的困难任务意识计算和决策,小脑实现偏向于本能的边缘侧实时性决策,这套云边端神经系统主体架构,借助后台服务器的超强算力,能够减少对于本体即时算力和算法的依赖。即人形机器人通过摄像头采集到的边缘计算节点数据,经过多传感器会结合常识环境,能在避障等动作时,进行较快的初步合理动作决策,用低延时处理保障机器人安全性,同时用边缘侧特征提取数据和预处理数据经过大模型的快速计算,实现虚拟仿真训练和重构,会最终提升动作的可靠性。
周永表示,这套云端大脑逻辑架构已经跑通,目前在预训练环境下,灵心巧手机器人已经能够做到99%的准确率,但陌生环境的动作泛化成功率还有待提升。
▍场景开拓的未来
由于复杂场景的结构特征点呈现几何增长,边缘计算节点数据预处理和特征提取难度会逐级上升,这不仅对于算力的需求更大,而且需要用到更为复杂多样的数据和更高频次的训练。这些芯片等方面的瓶颈,使得人形机器人从简单固定化结构场景落地到实际家庭的非结构化复杂场景,还有非常长的距离。
灵心巧手目前的做法除了减少人形机器人腿足部分的标准化变量以外,还尝试在末端执行器上进行优化,减少复杂度并强化指端的接触特性提取能力。从其公开展示的产品来看,灵心巧手这种自主开发的气动灵巧手,融合了触觉、力觉的多传感器融合方案,已经能够更好匹配算法识别物体表面的纹理,从而加快传感器数据的关键核心点优化,进行快速控制电机运动,实现安全的接触特性。
在价格方面,灵心巧手认为,由于不需要开发较为复杂的双足算法,家用场景的机器人或许能够率先把成本打下来快速走进千家万户。“未来用户如果能以一个万元级别按摩椅的价格购买一台机器人,这个机器人极致安全,而且能够让家属实时作为具身形态接入陪护老人,人形机器人的意义就已经实现一半。”周永对于未来充满信心。



