

灵活多样的运动能力是生物的一项重要生存技能,提升了其环境适应能力,如兔子通过折返奔跑躲避追捕,章鱼通过变形穿越狭小缝隙等。受其启发,研究人员近年来对具有多模态运动能力的软体机器人进行了大量探索,主要方法包括采用多输入结合、结构重构和主动响应材料等。但目前多模态软体机器人仍存在结构复杂、控制繁琐和响应缓慢等问题,缺乏利用单一输入实现快速运动模态改变的能力。 |
针对此问题,该论文提出了一种基于可重构手性网格脚的介电作动灵巧软体爬行机器人,可在单一电压输入下利用频率变化实现前进、后退和圆周运动的快速切换,并具备外界温度刺激下的结构重构能力。
相关成果以“Dexterous electrical-driven soft robots with reconfigurable chiral-lattice foot design”为题发表于Nature Communications期刊。该软体机器人采用介电人工肌肉作动,由一对平板脚和手性网格脚产生方向性的运动能力。
该论文建立了手性网格结构的动力学理论模型对其运动模态的变化进行了预测,理论和实验结果表明,当频率增加时,网格脚的运动模式从与地面接触变为周期性地弹跳,从而瞬间改变了软体机器人的前进和后退运动方向;当激励频率接近网格脚共振频率时,手性网格脚被压缩发生扭转变形,驱动软体机器人进行圆周运动。手性网格脚可进一步与智能材料结合,在外部温度刺激下通过形状重构实现多样功能。
实验证明,灵巧软体机器人可以到达平面上的任意点、探索迷宫、形成复杂的运动轨迹、或降低高度通过狭窄的隧道。该论文提出的结构设计和形状可重构方法为下一代具有灵巧多样运动能力的自主软体机器人提供了新的思路。
▍结构设计
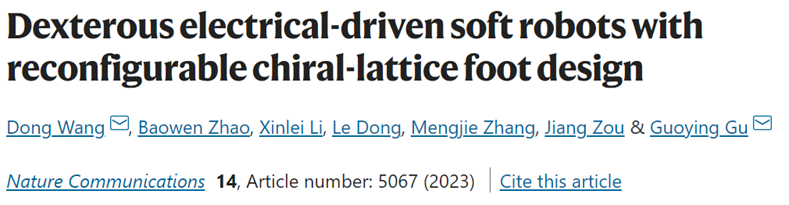
该软体机器人由介电作动器以及一对非对称脚构成。如图1所示,非对称脚包含平板脚和手性网格脚。这种结构设计使得软体机器人具备多种运动模态,并能通过改变激励频率实现多种运动模态间的快速即时切换。
当激励频率较低时,由于平板脚较轻,在介电人工肌肉的作动下跳起并被拉向网格脚的方向,软体机器人朝左移动;当激励频率增加时,网格脚的运动模式从与地面接触变为周期性地弹跳,从而使网格脚被拉向平板脚的方向,软体机器人改为朝右运动。该现象类似于在拍一个放在地面上的皮球,当拍的频率较低时,皮球仍停留在地面,但当频率升高时,皮球就会弹起。
当频率进一步增加接近网格脚共振频率时,手性网格脚的压缩急剧增加,引起压扭变形,驱动软体机器人进行圆周运动。采用上述结构设计,实现了单一电压输入下,软体机器人在低频下向左,中频下向右,高频下圆周运动瞬间切换的能力。
图1 软体机器人结构设计
▍理论建模
基于实验现象的分析,软体机器人的多运动模态主要由网格脚的动态响应决定。为了实现软体机器人运动的精准控制,我们建立了手性网格脚的动力学理论模型,如图2a所示。基于该动力学模型,得到了理论预测的临界频率曲线(图2b),在低频率段内,网格脚与平面保持接触(点a);超过临界频率后,网格脚从平面跳起(点c)。该动力学模型也可预测网格脚在不同频率激励下的动态响应(图2c-f)。我们实验测量了软体机器人的运动速度与激励频率的关系,验证了动力学模型的正确性。

图2 软体机器人理论建模
视频1 网格脚的动态响应
视频2 软体机器人的前进与后退运动
视频3 软体机器人的转弯运动
▍运动设计
(1)多运动模态瞬时切换
基于软体机器人的灵活运动能力,通过简单地改变激励频率,就可以轻松实现软体机器人运动方向的控制。软体机器人可以到达平面四个象限内的任意位置。这种运动变化的策略可以进一步应用于带有视觉反馈的软体机器人控制。通过控制激励频率,也实现了软体机器人对复杂迷宫的穿越。

视频4 软体机器人到达平面内的任意位置(视频已加速)
视频5 软体机器人穿越迷宫(视频已加速)
(2)温度刺激下的结构重构
手性网格脚可进一步与智能材料结合,通过频率和外部刺激下的形状重构实现多样功能。我们采用形状记忆聚合物3D打印了手性网格脚,通过结合结构设计和外部温度变化下的材料属性变化,软体机器人展现了对复杂环境的适应能力。在温度的刺激下,机器人能够实现S形运动轨迹和狭小隧道的穿越。
视频6 软体机器人隧道穿越(视频已加速)
(3)多功能运动
通过设计网格脚,软体机器人可实现多个S轨迹的运动,也可以嵌入加热器实现软体机器人的自主驱动能力。该软体机器人也具有一定的负载能力。
▍总结展望
该工作提出了一种基于可重构手性网格脚的介电作动灵巧软体机器人,可在单一电压输入下利用频率变化实现前进、后退和圆周运动的快速切换,并具备外界温度刺激下的结构重构能力。我们建立了手性网格脚的动力学理论模型,预测了其与地面保持接触和弹跳两种运动状态切换的临界频率,并进行了实验验证。该论文基于软体机器人的多运动模态和结构重构特性,进一步展示了软体机器人多种复杂环境下的灵巧运动能力。同时,该论文提出的结构设计和形状可重构方法为下一代具有灵巧多样运动能力的自主软体机器人提供了新的思路。
上海交通大学机械与动力工程学院的王东副教授为论文第一作者,赵宝文硕士为论文共同第一作者,谷国迎教授为论文通讯作者。该论文得到了国家自然科学基金、上海市科委和机械系统与振动国家重点实验室的资助。
论文信息:Wang, D.*, Zhao, B., Li, X., Dong, L., Zhang, M., Zou, J. and Gu, G.*, Dexterous electrical-driven soft robots with reconfigurable chiral-lattice foot design. Nat Commun 14, 5067 (2023).
论文链接:
https://doi.org/10.1038/s41467-023-40626-x
-----------------END-------------------


更多精彩
*自研4D激光雷达L1 + GPT大语言模型 宇树Unitree Go2四足机器人有啥黑科技?
*青少年福音!全球机器人科技启蒙齐聚世界机器人大会博览会,速线上报名错过等一年
*仅3人团队自费40万,打造史上最快拳击机器人!最低延迟12毫秒
*多领域国产替代,引领光伏、3C电子未来发展,这家企业做到国产前三的秘诀来了
*老外把CRT电视+Echo音箱暴力拆解 利用Will Cogley硬件平台成功打造出“大眼萌瓦力”机器人
*让焊接跟手机一样简单易用,大族机器人自动化焊接工作站(气保焊)全新升级
*等你来报名!6大主题论坛,数百位国内外专家学者,4.5万㎡展览面积,2023世界机器人大会售票通道已开启!
*上半年国产机器人市场份额达43.7%,埃斯顿、汇川、埃夫特销量领先
*提升围棋水平找对陪练是关键 为教培产业赋能 传承围棋文化 小明围棋机器人来了
*Everyday Robots关停后,谷歌用机器人做了一件大事
*50万美元打造一个会流汗会呼吸的机器人,网友:到底有啥用?
*谁说导盲机器人不如狗?!IEEE顶刊发表 基于空间风险图的势场法让导盲机器人变得更聪明
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募, 关注机器人大讲堂公众号,发送“ 交流群 ”获取入群方式!
招募作者
机器人大讲堂正在招募【兼职内容创作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可将简历和原创作品投至邮箱: LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎朋友们的加入!

看累了吗?戳一下“在看”支持我们吧



