
当我们说起家政机器人的时候,要么是想到扫地机器人,要么是更有科技感一些的人形机器人。
扫地机器人功能单一,而人形机器人离我们普通人还比较远,特别是价格。所以家政机器人还可以是什么样子的?
最近美国伊利诺伊大学的科学家们发明了一种即插即用机器人,就像是便携式小灯一样,随便把它安装在哪里,比如装在洗碗池边,它就可以开始工作了:
而且这款叫做PAPRAS(Plug-And-Play Robotic Arm System)的即插即用机械臂最大的特点是轻便,可以拎着到处走动:
当你需要喝咖啡时,把它们装在桌子上,不一会儿,一杯热气腾腾的咖啡就送到你面前:
▍一款不肝不氪的机械臂
传统的工业机械臂笨重(至少10多公斤)而且价格昂贵(许多要2万美元以上),所以作者想设计一款不肝不氪,制作简单的价格亲民的机械臂。PAPRAS是专门为了家庭场景设计,尺寸适合普通的厨房和客厅等有限的空间。
它只有6公斤重,主体结构都是3D打印的。尽管自己很轻便,它的力气可不小,可以拿起3公斤重的东西。在使用之前,要先在家具上安装一个同样是3D打印的底座。
从结构上来讲,下图中橙色的部分都是用PLA材料3D打印的,黑色的部分是舵机,前面红色的夹具,绿色的是安装在前端的摄像头。

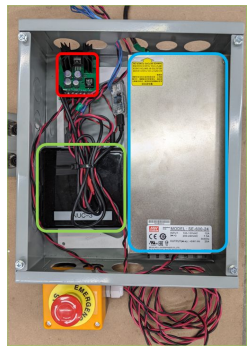
它的控制箱里有电源、控制电脑、RS-485适配器、紧急停止开关和另一块定制的印刷电路板。电源从交流电源获得电力,输出24V的直流电,电力经过紧急停止开关后,供应给挂载处的机械臂电机。电源也给电路板上一个独立的稳压器提供电力,输出19V电力给电脑供电。这种设计使得紧急停止开关能安全切断机械臂的电力而不影响控制电脑。电脑通过USB连接U2D2转换器,它把USB信号转换成与电机接口所需的RS-485信号。
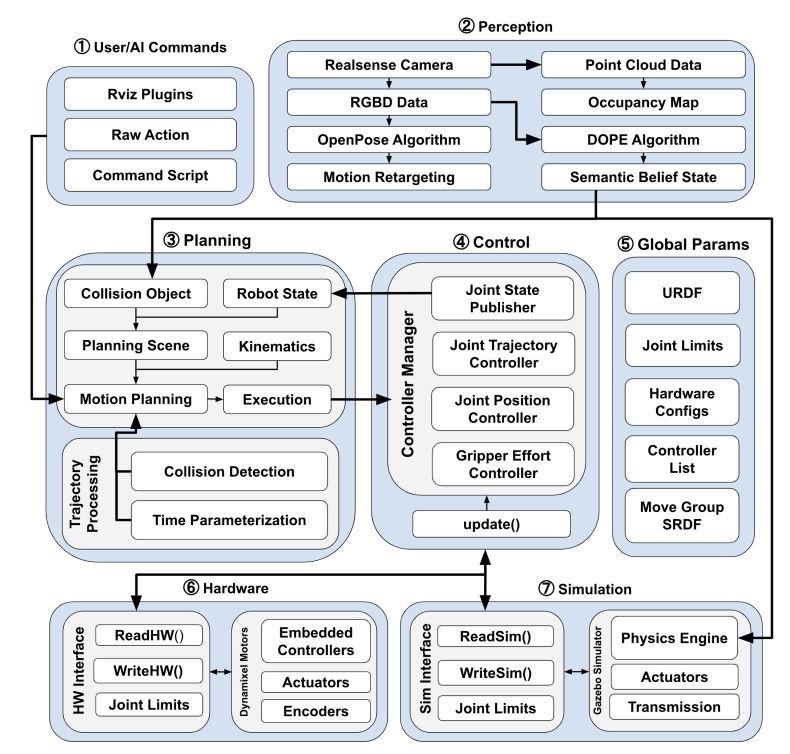
PAPRAS的软件架构基于一个开源框架,并针对低延迟多代理分布式机械臂控制进行了优化。该架构使用C++开发,在ROS Noetic上运行,并与Ubuntu 20.04 Linux发行版兼容。电机子程序的低级编程采用Dynamixel SDK。机器人的高级编程,如规划和感知管道,是通过整合各种ROS软件包来实现的。它的软件架构包括用户操作界面、感知、规划、控制和模拟等:
▍PAPRAS,请开始你的表演

机械臂用起来也挺简单。首先要创建一个URDF文件,告诉它工作环境是什么样子的,它会被安装在什么位置和方向。然后,需要用到MoveIt软件包,再创建ROS启动和YAML配置文件,还有一个YAML文件。在文件里简单写明想要展示的姿势和动作。最后,一个C++脚本会根据任务计划来控制机械臂。总的来说,这些步骤都不难,几乎不需要花什么力气。接下来,PAPRAS就可以开始这个系统已经展示了像洗碗、做咖啡、穿衣服和双臂运动等场景。
洗碗可以用洗碗机,但要是连把碗从池子里捞出来都懒的晚期懒癌怎么办?没问题:

PAPRAS还可以和其它机器人联用,比如装在机器狗身上,让它顿时开了外挂:

还可以多个机械臂互相配合,多个机械臂围坐在桌子上泡茶,一副其乐融融的样子,这里似乎没有人类什么事了:

还有双臂模式,真正向你张开双臂。双臂模式由一个支架、两个机械臂和一个客户端计算机组成。通过相机记录人类的动作,再使用OpenPose人体骨骼跟踪技术,直接将人类关节角度值映射到机器人上,模仿人们的动作:

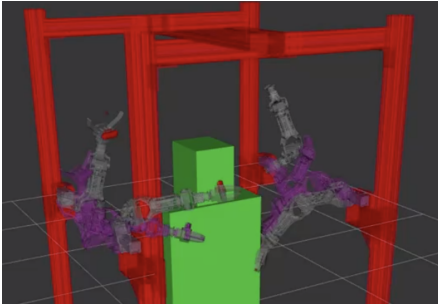
最有意思的是懒人穿衣模式。四个机械臂被安装在试衣环境中的四根立柱上。在这里,所有四个臂都是由单个客户端计算机同时控制,可以帮你穿上外套。任务规划流程从你身后的机械臂抓住外套袖子,让外套前面部分从两侧手臂中露出,帮助你穿上外套,最后将外套放下来。这种模式能够实现自动穿衣,同时通过实时多智能体运动规划确保安全。

在未来,作者们将继续开发更多适用于人类环境的应用。家具、家用电器和其他类型的移动式机器人都可能是PAPRAS的潜在应用。此外,他们还计划根据目标任务的三维数据来优化PAPRAS的工作空间。
收集空间数据,比如物体在三维空间中的轨迹,对机器人完成任务非常重要。为此,他们将通过动作捕捉系统收集物体和人类动作的轨迹。根据这些数据,可以得到一系列动作可能的末端执行器轨迹。这是一个有趣的设计优化问题,即通过优化机械臂数量、安装位置以及物体的轨迹来解决各种问题。而这一切,都是为了让我们获得回家就躺平的自由。
该研究被发布在arXiv上,文章标题为“PAPRAS: Plug-And-Play Robotic Arm System”:
作者都是来自伊利诺伊大学(UIUC)的运动智能机器实验室(KIMLAB,Kinetic Intelligent Machine LAB):

-----------------END-------------------



