
人类对于遥操作系统的憧憬由来已久,多部电影和著作中,都对于这种人类远程控制机器人加注了非常多的笔墨。几十年的研究和开发,加上不断改进的技术性能和更低的组件成本相结合,使昨天的科幻小说开始快速成为现实。
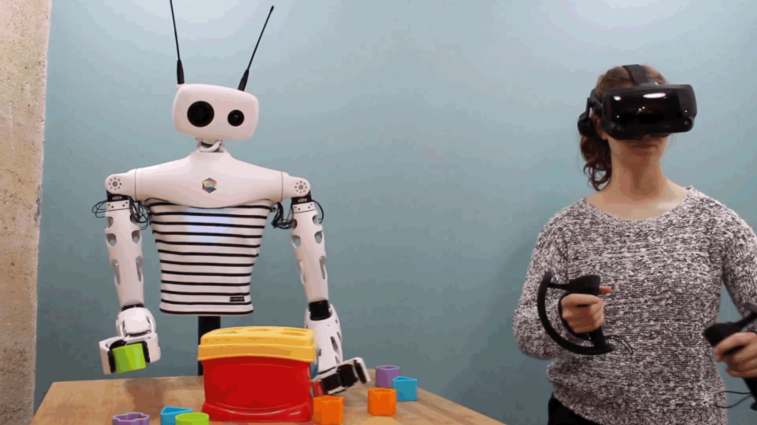
当前,遥操作系统正更频繁地出现在产业界和学术成果中。无论是近来异常火爆的QIBBOT拳击机器人等产品,还是在学术研究中成果频出的沉浸式灵巧手系统,遥操作已经快速打开了人们无限的想象空间,引起了研究者和产业界极大的兴趣。
▍遥操作系统价值愈发凸显
从技术上来说,一个合格的遥操作系统主要由感知系统和控制系统两大部分组成。其中,感知系统主要采用深度视觉人类行为感知和多模态数据手套等方式,实时感知人的手臂和手的运动姿态信息。控制系统则主要包括智能控制器、拟人机械臂和灵巧手,用于实现动作的复现。
在感知系统和控制系统中间,智能控制器是这一平台运行的核心。其作用主要是通过局域网实现感知系统和控制系统之间的数据通信,使实时感知到的人体手臂和手臂运动姿态信息进行数据融合处理,并智能控制拟人机械臂和灵巧手,进而稳定可靠地完成拟人化作业功能。
因此,本质上而言,人机交互遥操作机器人指依托于高速通信网络,通过各种传感设备,测量人肢体的运动信息,并作为控制指令,去控制机器人的运动与操作,同时再将机器人的视觉、力觉、触觉等各种感觉反馈给人,实现人与机器人的深度耦合。
然而遥操作系统的技术原理听起来简单,但要实现的难度却相当高。感知系统、控制系统、控制平台这三方面的不同方案,会影响系统的延时性和可靠性。由于遥操作系统的核心就是临场感程度,也就是机器人的视觉、力觉、触觉等各种感觉如何能第一时间能反馈给人,使人“身临其境”,同时也要通过各种传感设备收集人的动作、力度等数据,实时且精确控制远端机器人的运动,因此这必然需要硬件和算法的强大适配度。
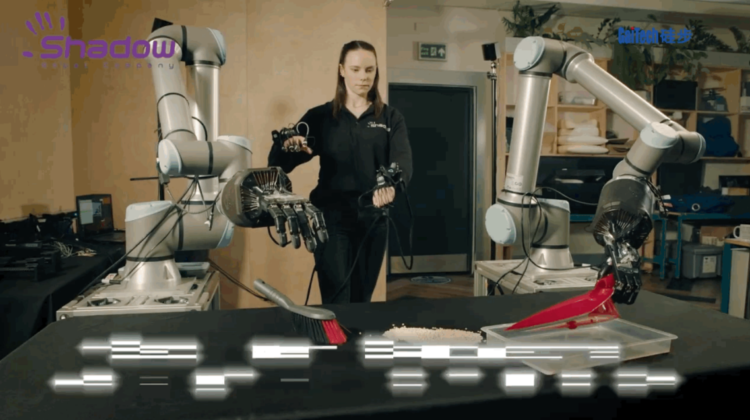
以目前产业界和科研领域应用较为广泛的硅步Shadow 遥操作系统为例,Shadow 遥操作系统包括单臂和双臂两个版本,该系统硬件和软件开发生态上位于行业领先水平,具有典型的低延时、高动态响应特征,并已经形成了一套成熟的遥操作系统解决方案,能为国内用户提供完善的解决方案。
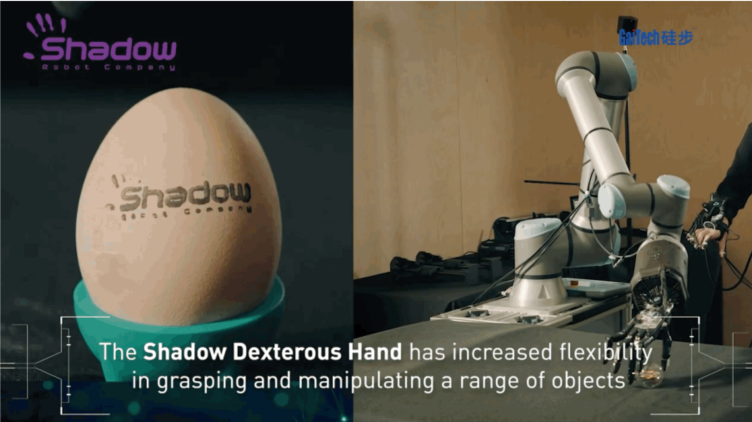
该系统集成了Shadow灵巧手,选配UR10e 机械臂及其控制柜等部件,由于Shadow灵巧手基于先进的磁力三维传感器机器人技术,具有明显的低延迟特征,Shadow Glove则能很好模仿人类手臂和手的运动,可以实现更高的灵活度与精准性。在此基础上,再借助HTC Vive Tracker 和 Vive Base Stations,才能高度直观地再现人类动作,使远距离精确、灵巧地进行作业任务成为可能。
综合而言,目前硅步提供的这套Shadow 遥操作系统,有着精确的运动学和动力学模型,通过将人类手部的运动情况转化为机械手能够解读的信号,从而实现远距离操控机械手运动,并且在此基础上借助力反馈等设备的加持,亦可以将机械手所获取到的触觉感知反馈给操作员,通过这样的双向反馈以获得更好的运动表现。
不仅如此,硅步提供的Shadow 遥操作系统还是一个开放式的开发平台,它基于 ROS 开发,研究者可以很容易的利用它进行二次开发,同时该系统采用模块化设计,用户还可以轻松添加组件并将其集成到系统当中,针对应用场景实现更高的定制化。这也是Shadow 遥操作系统得到了产业界和学术界非常多认可的重要原因。
▍研发到产业化的进程正加速
对产业界而言,遥操作是一种非常新颖且独特的形式,有着非常明确的市场化价值。
例如就游戏产业而言,与传统电脑游戏不同,遥操作带来的是物理与精神方面更多元化的感受,机器人会模仿人类的动作,并且实现实时的反馈。但机器人又放大了人类动作的意图,让这种快感更加迅猛,得益于当前通讯技术的飞速发展,机器指令的延迟大为降低,这使得机器人的动作速度也前所未有。
虽然我们距离真正拥有能够像“星球大战”R2-D2角色一样工作的机器人可能还有很远的时间,但当前Shadow 灵巧手以及 Shadow 遥操作系统以其卓越的表现,已经被众多高校及科研院所认可并服务于相关领域的教学与研究。
由于遥操作系统的系统复杂程度较高,所涉及的专业包括机器人、自动化、电子工程、计算机科学、生物医学、材料科学等多方面,部分高校借助类似Shadow 遥操作系统,还已经开发出例如自动控制原理、现代控制工程、计算机控制技术、机器人控制技术、智能控制基础与实践等多个相应课程,并在此基础上开展了自主控制、人机协作等领域研究,迭代出了许多移动、灵巧且能够跨多种操作体系的新型遥操作机器人,目前正处于研发到产业化的早期。
例如某高校与硅步合作,就开发了一套基于移动平台的沉浸式灵巧遥操作系统,希望借此将人类智能与机器力量和精度结合,用于增强人类能力,甚至提高人类的活动范围,未来在这种共生关系中,实现多任务机器人依靠人类的指导更好完成医疗手术、抢险排查等工作,同时保护人类免受危险的环境和任务的影响。
据机器人大讲堂了解,在高校实验室中,该沉浸式灵巧遥操作系统历经了多次研发升级,不仅通过集成Shadow的感知系统,还配备深度视觉和多模态数据手套,并实现了基于Leaomotion手势传
为了提高多模态感知能力,后续该研究不断优化升级的过程中,还以拟人化的思路,开发加入了便于移动的底盘以及一个升降杆结构,并通过优化质量分布、机械结构、驱动和通信,使得该系统具有更精确的自动定位和轨迹规划能力,提升了该系统的空间操作能力以及处理能力。
可以预见,这套遥操作系统通过高度机动、灵巧的控制方式,将会很大程度上改变行业和人类对灾难响应的能力,具备移动性、智能化的控制系统及人机交互式遥操作系统,未来有望能够应用于更复杂的作业环境,有效实现多元化环境下的人工替代。

▍结语与未来
遥操作使得我们的机器人应用正处于一个重要的历史转折点。遥想未来,一台机器人可能就会是我们的一个代理,它们能由人类控制,利用人的智力、知识、本能、直觉和判断力进行处理很多新事物,由于能够与人类自己的身体以相同的姿态和方式进行物理操作,但安全且具有超人一样的力量、耐力和精度,这会为世界上的许多行业带来完全不同的改变。
从技术前景而言,类似QIBBOT拳击机器人的游戏领域商业化落地已经是遥操作系统能够短期见成效的方向之一,除此之外,智能制造、建筑施工、消防救援、农业生产、星际探索等领域,遥操作都有着非常不错的开发价值。
例如国际空间站最早采用这种技术用于舱内的科学实验任务和舱外的维护任务,中国空间站目前拥有的三条机械臂也采用的是人机交互遥操作机器人技术,此外,嫦娥三号月面巡视器、卫星在轨服务机器人等也都用上了这套先进技术。
又例如自动化实验中,双臂遥操作机器人可以用于执行各种实验,例如组装、测量、取样等,不仅可以减少手动实验操作的错误率,还可以提高实验效率和精度,减少有毒有害物质对人体的伤害。
目前,国内大多数遥操作的研究和产业化落地仍然正在快速进行中,硅步一直以来致力于为研究者和开发者提供更加开放以及便利的遥操作系统平台,助力产学研未来几年能在世界各地的不同领域取得新成就。
了解和体验、购买硅步遥操作系统,欢迎联系硅步市场人员




