
近日,国际机构学和机器科学联合会(International Federation for the Promotion of Mechanism and Machine Science,以下简称“IFToMM”)第十六届世界大会(16th IFToMM World Congress)在日本东京召开。本届大会上,南科大机械与能源工程系讲席教授、机器人研究院院长戴建生院士被授予“IFToMM卓越成就奖”(Award of Merit),为该奖设立二十年的第十五位获奖者。我们采访了戴建生院士团队,请他们谈谈项目及科研工作背后的故事。

戴建生院士
▍促进机械形态变革 助力领域绿色发展
在2023国家自然科学基金评选结果中,南科大获得了278项基金资助项目。其中,由戴建生院士团队牵头的关注“机械设计、制造及服役中的科学问题(E05)”的重点项目获批立项。该项目聚焦变胞机构高适应性设计与稳态变构国际难题,融入生物进化论原理,深入研究高适应变胞机构中力流演变规律与进化形态学对机构构形演变的影响,开发两种高适应性具有变胞特性的智能结构进化机器人以适应航空狭窄腔体作业与航天空间抓捕任务。
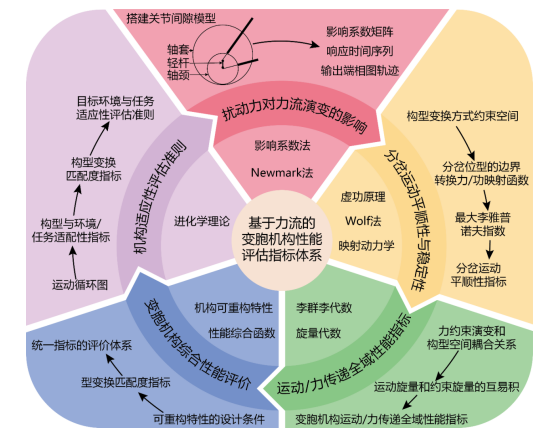
基于力流的变胞机构性能评估指标体系的研究示意图
在以人工智能和机器人技术为代表的第四次工业革命带来了传统机器的更新下,迎来了机器人发展的时代,包括服务机器人、先进制造业、航空航天、自动化生产线等领域。但在生态环境恶化加剧和自然资源日益紧缺的情况下,各类机器人与机械设备对机构可重构能力与变结构特性的要求不断提高。换句话说,需要对机器人骨架的机构进行创新设计,使其形态能够随意切换,减少机器人、电机、电池等部件的生产,达到减少环境污染、能源消耗的效果。
戴建生院士本次牵头的国自然重点项目聚焦高适应性机构的核心与共性问题,采用进化形态学,提出基于生物进化的变构设计方法,揭示力流演变机理及其对变构设计影响,开发用于航空狭窄腔体作业与太空多态碎片抓捕任务的两套高适应多元变胞的智能结构进化机器人系统以验证理论与方法。
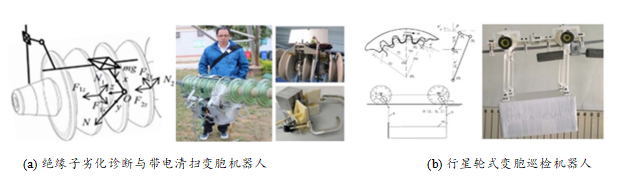
基于变胞机构设计方法开发的电力变胞机器人
团队准备开发的两套样机系统,分别为基于行为元与胞元的进化形态学设计的航空异形内腔体高适应多元变胞机器人样机,和基于基因操作的进化形态学设计的航天高适应多元变胞抓捕手系统样机。
前者面向航空飞行器。飞行器进气风道结构复杂,内腔形状不断变化,传统的定形态机器人难以进入维修、检查等。以进气风道缺陷检测任务实际需求为例,戴院士团队研制复杂异形内腔体高适应变胞机器人原理样机,可采用变形态、变拓扑及变结构等多元进化模式,沿飞机风道受限空间、变截面、变曲率和变凹凸性的内壁自主行走,实现内壁缺陷无损检测。
第二套样机面向未来空间站的建设与月球、火星等深空探测,为实现对服务星进行在轨升级、故障模块更换、补给、装配等维护任务及太空垃圾清理任务,利用戴院士团队研究所提进化形态学的构建基因操作方法,通过对胞元、形态元、变量元的操作,实现在设计该多元变胞抓捕手阶段机构变构的进化形态学综合,从而达到在航天领域能量受限环境下,一机多能、一机多用的特点。也就是说,在太空环境下,戴院士团队研制的新型机器人,可以达到凭变换形态完成所有任务的效果,可节省大量能源,促进机器人领域科技快速发展。
▍深耕变胞机构与可重构领域 勇于面对挑战性课题
戴建生院士自1998年从生物学原理提出Metamorphic Mechanisms,1999年与中国工程院院士张启先共同确认中文翻译为变胞机构以来,在变胞机构与可重构领域深耕了二十余年。这些年来,戴院士在机构的数学理论上持续研究,在机构的开发上带领团队研发了许多新机构,在研究上协助许多院校研究所进行变胞机构与可重构机构的多方位研究。
自然界的生物经过进化,存活下来的生命体都具有极强的环境适应性和优异的生存能力。总结生物进化形式可概括为四种形态:无变形态(Ametabolous),半变形态(Hemimetabolous),全变形态(Holometabolous),超变形态(Hyper-metamorphosis)。领域学者们从生物学中汲取灵感,从自然万物生长进化过程寻找对设计的启发。特别是近年来提出的进化机器人融合感知、认知、形态为一体,为IEEE(电气与电子工程师协会)认定的机器人领域未来发展的一个重要方向。“但目前研究只是考虑感知系统、电机系统、控制架构等,重在算法层面的演化、模拟及控制,还没有从结构/机构的形态进化方面开展研究。如何突破进化机器人本体结构进化并构建此类机器人的设计理论和方法是一项挑战性难题。我们团队迎接挑战,在智能结构进化机器人方面进行深入研究。”戴院士说道。
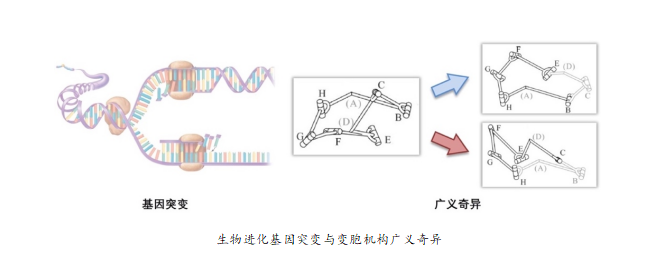
戴院士当前研究的变胞机构就是在生物进化启发下提出和发展的。变胞机构是一种在线进化自重构的高适应性机构,前期单纯从构型、型综合和运动学研究。而当前在这类机构的科学研究前沿,特别是研究该类机构变构设计时,引入多态进化来实现多元变胞机构与机器人设计是一个重要的研究方向。同时在科学研究中引入了环境力驱动力及其传递与流向(即力流)对变构变异影响,又是一个重要研究方向。
现有机构设计都是采用传统设计方法,进行多种研究。对于这种设计,一是明显将运动学与力学分离,力运动流向在设计后再考虑。二是只针对于定拓扑、定自由度机构。前者的拓扑运动学综合与力学性能是割裂的,后者同样没有考虑力对变构的影响特别是力流对机构变构与变构导向的影响。戴院士介绍道,“多元进化设计需要面对复杂多变环境引发的作用力,特别是构态变换又离不开力流,因此多元变胞机构进化设计不仅要将进化形态学融于构型设计之中,也要将力流演变融入其中。”
戴院士与他团队的多年研究在国际上开辟了可重构机构与可重构机器人的新领域,得以在国际上进行广泛研究。他在2015年获得了ASME DED机构学与机器人学终身成就奖,成为该奖设立41年来第27位获奖者。此外,在2020年获得国际机械设计最高奖:ASME机械设计最高奖,为设奖62年来第58位获奖者,首位华人获奖者。
戴院士本次所开展的重点项目将生物多态进化和机构多元变胞融合起来,研究进化与力流融合的高适应多元变胞机构的设计原理与方法,大大提高了机构适应复杂受限服役环境和一机多能操作任务的能力,是机构学领域的一个挑战性课题,相关研究对丰富机构学理论和工程应用均具有十分重要的意义。
▍不经一番寒彻骨 怎得梅花扑鼻香
“做研究在我看来就是十年磨一剑,前沿的理论研究需要经过不断挖掘、探索与沉淀。机器人机构学在萌芽时期的论文专著极少,澳大利亚著名旋量机构学专家Hunt教授于1978年出版了旋量理论专著,由于书中没有公式,非常难读懂。我就反复读,一遍不行,就读第三遍、第四遍,当时导师戏称我为‘旋量先生’。”回忆起做研究过程中经历的种种,戴建生院士感慨万千。经历了二十多年对于旋量理论的研究,戴院士提出了旋量代数并发表了数篇第一作者与单独作者的旋量代数文章。2014年,经历了两年的英文版写作与三年的中文翻译,戴院士在有几十位数学家著述的“现代数学基础”丛书中,发表了数学专著《旋量代数与李群、李代数》,并于2020年在70部数学丛书中进行再版。
“不经一番寒彻骨,怎得梅花扑鼻香。”做科研并不是一帆风顺,要经历许多努力、克服重重困难,才能到达最终的彼岸。在这次的国自然重点项目申请过程中,戴院士在撰写项目申请一事上可谓是“呕心沥血”:“做国自然重点项目申请的过程中,我假期三天内时而躺在沙发思考、手书,时而又回到电脑进行查阅与确认,不断陷入思考当中。后来又用整整一天时间填入文档,反复确认。”研究、总结的过程中总伴随着思考,这是一个纠结而又不得不经历的过程。

戴建生与同学们交流
戴院士团队的研究生何景辉说道:“戴院士对于我们做任何事的细节都要求一丝不苟,对我们研究的任何材料都要精确到一字一词,甚至标点符号。这让我们养成了对待每一件事都要细心、认真,将它做到完美。”正是这样的严格要求,团队才做出了重要的科研项目,为国家的科研发展做出了贡献。
戴院士说道,机器人的发展是事关“中国智造”的大计,对提高国家工业机器人产业发展竞争力,满足国家对高端制造技术发展的需求有着极其重要的作用。南科大机器人研究院建立以来创立了多个省、市级重点实验室,目前可重构与柔性制造机器人重点实验室也正在筹备中。地处改革开放的前沿城市深圳,且面临“双区”的重要契机,机器人研究院的发展迎来了难得的历史发展机遇。未来,戴院士坚信,南科大机器人研究院不仅要立足深圳市,更要面向粤港澳大湾区和国家,力争引领相关研究冲向世界机器人研究的前沿。
文章来源:南方科技大学
END

●国际快讯|AI应用; 机器人路径规划新框架; “Z-53神风特攻队”无人机;3D打印固体火箭发动机;五眼联盟AI合作法案
●国际快讯|螳螂虾仿真机器人;新型机器人装置;可扩展振动式压电机器人;3D打印的软机器人手
●国际快讯:折纸制造cm级四足机器人问世;新型昆虫级变形机器人被研制

联系我们
·微 信 号 :myrobot2001
·联系电话:18100123515



