

小型软体机器人,凭借其多物理场响应能力,在适应环境刺激和执行复杂任务方面具有独特优势。它们为传统刚性机器人领域带来了柔软与灵活性的新选择。尤其在形状变形这一关键特性上,小型软体机器人能够通过内部应力的变化,实现从二维(2D)电子器件到三维(3D)结构器件的转变,这使其在医疗康复、人工智能及柔性电子等多个领域内展现出了巨大的应用潜力。
然而,尽管前景广阔,目前在这一领域的研究与开发仍面临诸多挑战。现有研究成果普遍反映出以下问题:一是多重响应之间的相互影响,二是装配制造工艺的复杂性,三是加工精度不足。这些问题限制了微型软体机器人在执行任务时形态切换和步态转换的能力,同时影响了它们的智能化和可操控性的提升,使得机器人的自由度、多功能性以及步态转换和形态切换的流畅性受到限制。
鉴于此,探索并开发一种具备可编程性、高精度和简单性的通用制造方法变得尤为迫切。
据探索前沿科技边界,传递前沿科技成果的X-robot投稿,近日,由德国马普所联合西安交通大学和北京理工大学研究团队针对上述难题进行了深入研究,该研究团队创新性提出了一种基于激光逐层加工的一体化编程制造策略,通过对多层异质薄膜材料的选区、逐层加工,巧妙地实现了微型软体机器人的多物理场响应特性与驱动解耦。
这种解耦形状变形允许独立地对每个变换步骤进行编程,从而增强系统的自由度和整体功能。结合干凝胶、激光诱导石墨烯和全材料激光图案化,该方法能够创建多种具有复杂三维形态的结构。
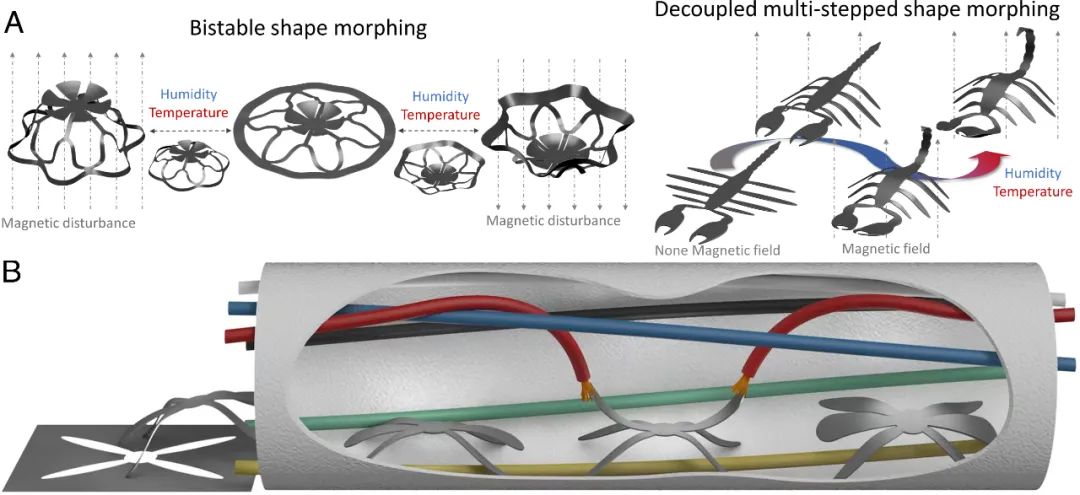
为了理解潜在机制,研究团队开发了异质薄膜结构力学模型并通过多物理场耦合有限元分析来预测和设计形状变形行为。作为概念验证,研究团队展示了双稳态结构的连续转变,并演示了类似蝎子运动的形态。凭借其高度的可编程性,多步变形软机器人(MSSM)可用作自适应环境的逻辑控制电路开关,并可作为维护机器人用于电路修复,发挥其解耦的形状变形能力,具备了前所未有的操控灵巧性与功能复杂性。
该研究成果的相关论文以“Single-step precision programming of decoupled multiresponsive soft millirobots”为题发表在美国《国家科学院院刊》(PNAS)。论文共同第一作者为马普所博士后郑志强博士、西交大韩捷博士及北理工石青教授。
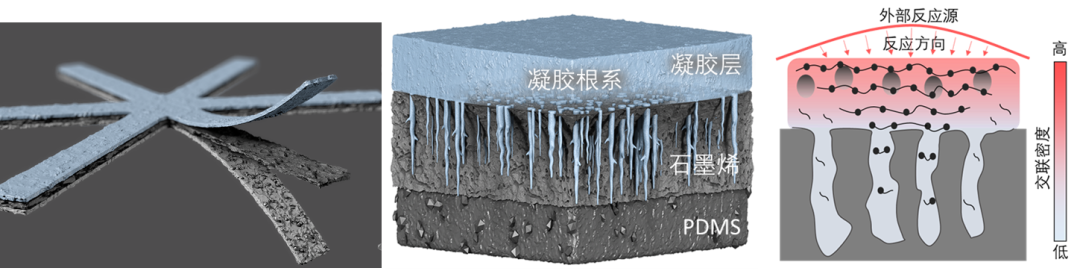
可多物理场响应的多层异质薄膜材料(Ref: Adv. Sci., 2023)
据郑志强博士补充介绍,多层异质薄膜材料是团队2023年发表在《先进科学》(Advanced Science)的论文“Electrodeposited superhydrophilic-superhydrophobic composites for untethered multi-stimuli-responsive soft millirobots”中首次提出的(公众号导读:软体机器人新突破:电沉积水凝胶技术攻克亲-疏水性材料结合难题),这次的工作就像用激光将一块璞玉雕刻成器,推动了微型软体机器人的智能化和功能化,因此一轮2位审稿人用12个Yes对本工作的创新性和重要性表示一致认可。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍你相信光吗?多策略结构编程的三把雕刻光刀
第一刀 – 凝胶层图案化选区编程
通过精确调控UV激光的强度和切割模式,该团队成功开发了一种独立切割工艺用于处理凝胶层(厚度小于4μm),同时还引入了“热诱导分离”工艺用于处理凝胶根部。这些技术的结合实现了对凝胶层的编程,其分辨率优于30μm。
在制造MSSM(多步变形软毫机器人)过程中,这种高精度的激光图案化技术是关键。它允许研究人员以超过30μm的精度对干凝胶层进行图案化,从而可以精确地操控由湿度响应层引起的应力分布和角度变化。通过改变干凝胶和微槽(干凝胶去除区域)的宽度比,可以调整梁结构的曲率。
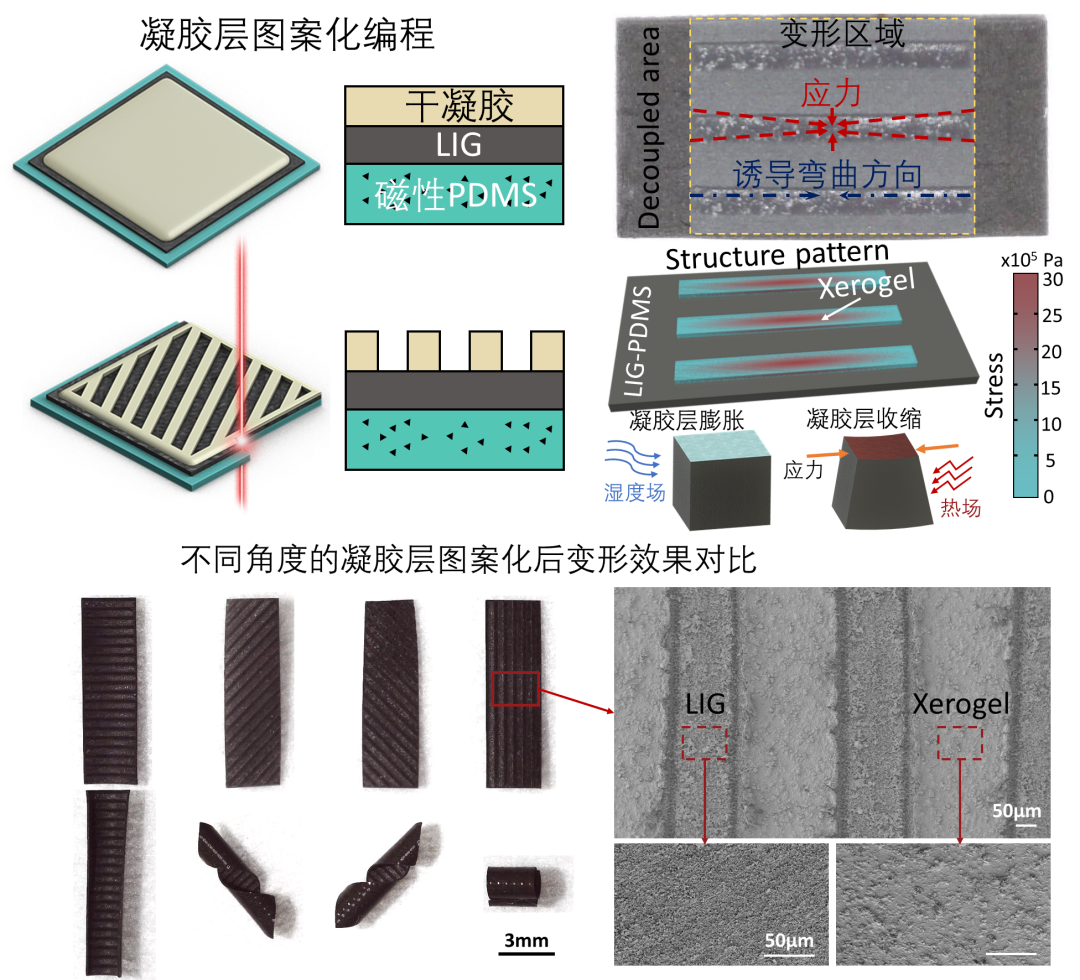
(凝胶层图案化编程)
例如,当宽度比为3:1时(即干凝胶覆盖率为75%),可以实现最大弯曲曲率为2.3 mm-¹;而当宽度比变为1:3时(干凝胶覆盖率仍为75%),最大弯曲曲率降低至0.5 mm-¹。此外,该方法还允许对形状变形进行重新处理,使得MSSM的刺激响应形状变形能够被解耦和编程。由于干凝胶层作为活性层在湿度响应形状变形中提供必要的应力,因此干凝胶区域的面积比在决定MSSM的形状变形能力方面起着至关重要的作用。
通过这种先进的激光图案化技术,研究团队能够在微小的尺度上创造出复杂的图案,从而实现对微型软体机器人形态的精确控制。这种方法有效地解耦了形变过程,使得团队能够更灵活地设计和调整软体机器人的结构,以满足不同应用场景的需求。
第二刀 – LIG层图案化选区编程
在探索软体机器人领域的前沿,研究团队深入分析了微型软体机器人的制造过程。韩捷博士指出,凝胶层的部分移除会导致层间应力减弱,这不利于微型软体机器人达到理想的变形效果。这一发现促使该团队寻求一种既能增强各向异性变形能力,又能最小化驱动能力损耗的新策略。
为此,该研究团队提出了一种图案化LIG层的无损编程策略。该策略的核心在于通过在电沉积水凝胶之前对柔性电极LIG层进行精确的图案化切除处理,改变电沉积过程中的电场分布,从而赋予微型软体机器人出色的可控变形能力。通过结合两种编程方法,研究团队实现了微型软体机器人的二次重编程,这不仅使得选区响应成为可能,还允许了机器人的重复使用。
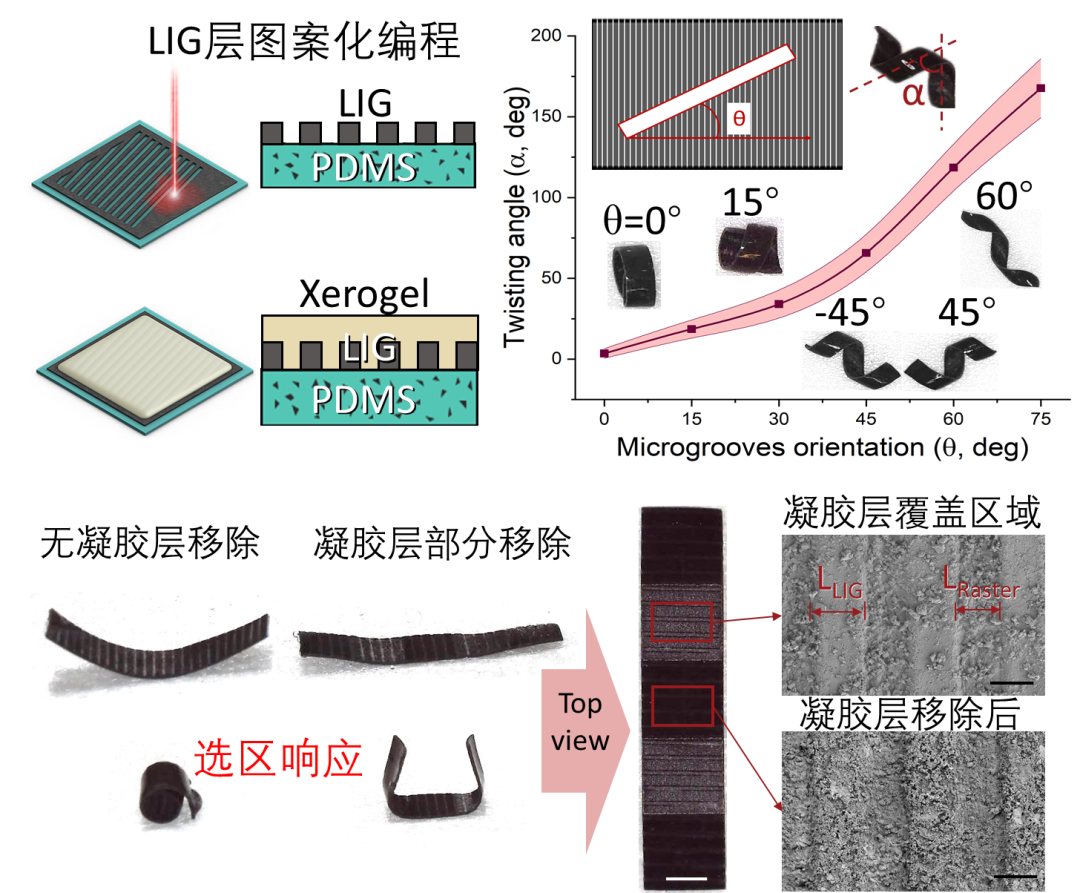
(凝胶层+LIG层的二次重编程)
第三刀 – 剪纸结构选区编程
在探索软体机器人领域的新策略时,该研究团队还着重研究了如何通过调整凝胶层覆盖区域比例以及降低基底材料的强度来提升变形能力,并创新性开发出了剪纸结构编程工艺,这一工艺不仅保持了凝胶层的有效覆盖,而且通过减弱材料的整体刚度,实现了卓越的形状变形效果。
具体来说,研究团队运用激光技术对材料进行精准的图案化处理,创造出具有剪纸结构的软体元件。这种结构设计使得材料能够在湿度和温度的特定条件下迅速且稳定地完成从2D到3D的转变。实验结果表明,当全部材料被去除后,与传统的LIG光栅化或未处理结构相比,该结构表现出更大的弯曲曲率。在相对湿度为30%和温度超过50℃的环境中,条带结构可在10秒内完成转变,并且在经过八次循环变形后仍能维持其变形能力。即使在90%的相对湿度下暴露12小时,条带结构也能保持其转变能力,这证明了研究团队的方法在稳定性方面的显著优势。
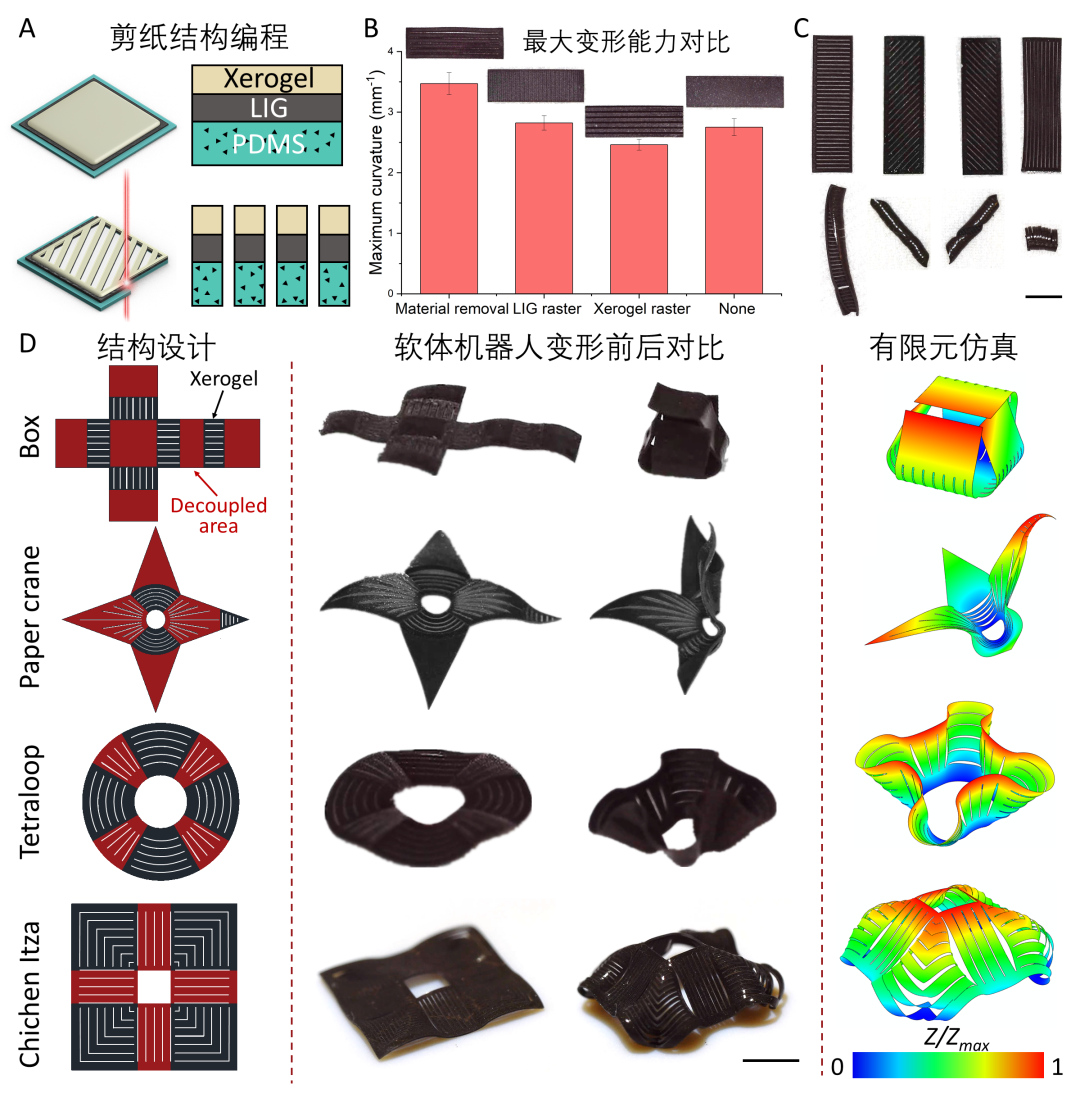
(多种剪纸结构变形设计)
为了验证该编程工艺的灵活性,研究团队设计并制造了多种复杂的2D至3D变形结构,包括立方体、千纸鹤、玛雅金字塔等。这些结构的变形过程不仅展示了材料本身的高度适应性,也证实了研究团队基于Abaqus的仿真模型的准确性。在这些设计中,黑色区域代表干凝胶,白色区域为空隙,而红色区域则表示没有干凝胶层的LIG层。
此外,研究团队还利用有限元分析来预测和模拟形状变形行为,确保其设计和理论模型与实际表现相匹配。最终结果表明,盒子、纸鹤、四环和奇琴伊察结构的变形与模拟结果完美吻合,研究团队的仿真结果得到了实验验证。
▍可驱动剪纸结构的无限可能!Pop-up的可调双稳态构型
通过创新设计和制造技术,该研究团队不仅丰富了机器人设计的工具箱,还基于结构力学和机械设计的深厚基础,成功开发了一系列从2D薄膜到3D体结构的设计。这些成果在柔性微型血管支架、传感器等应用领域具有巨大潜力。
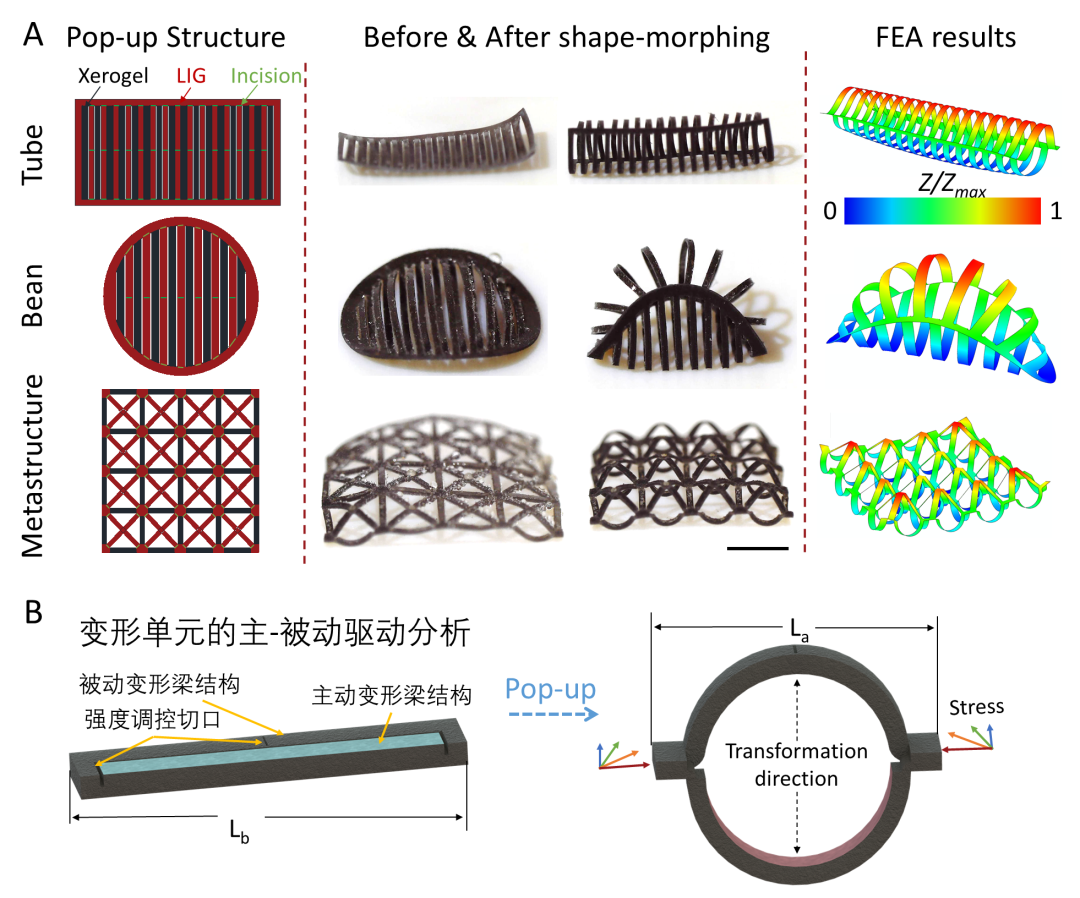

(Pop-up剪纸结构)
此外,多物理场响应特性本次也得到了极致发挥。双稳态结构在中间非稳态时受到微小扰动即可快速转变为任意一个稳定状态。基于此特性,研究团队通过结合湿度和磁场响应,在微型软体机器人的中间态下,施加微弱的定向磁场(小于10 mT)即可诱导大变形至所需状态,从而实现pop-up结构的pop-down模态。
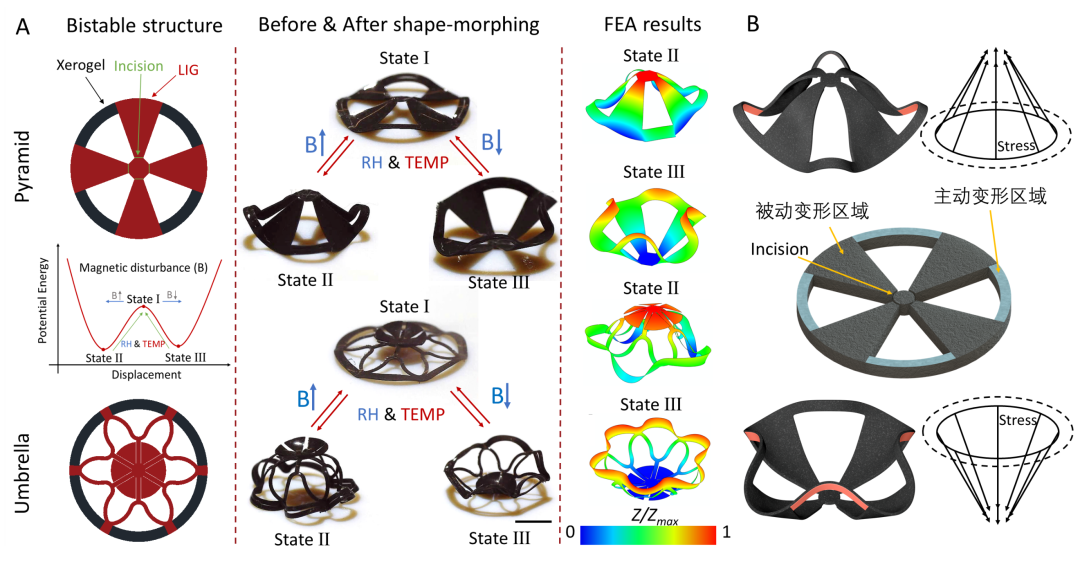
(磁场调控双稳态结构定向变形)
通过多物理场响应解耦技术,研究团队成功实现了微型软体机器人的分区响应与异步响应。这一突破性进展为软体机器人的精准控制和应用拓展提供了新的可能性。
▍响应解耦赋能功能模块独立多步驱动!
为了展示这一功能的实际应用,研究团队开发了一款仿生蝎子机器人。这款机器人不仅能够在低湿/高温环境下站立,还能在电磁场的操控下实现步态爬行。此外,它还能够独立控制尾部的弯曲和钳子的抓取,充分展现了其灵活的运动能力和多功能性。
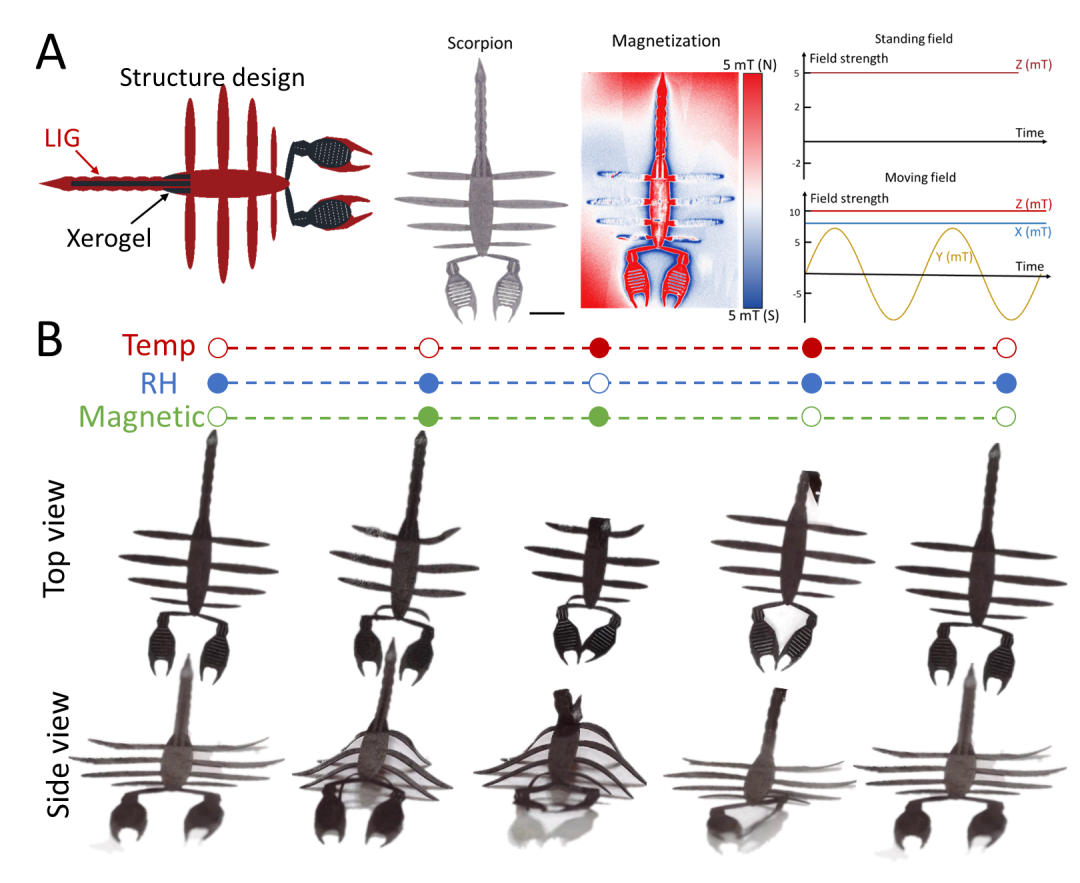
(多物理场分区异步驱动仿生机器人)
该仿生蝎子机器人设计灵感来源于自然界的动物,它们能够将不同的功能分配到身体的不同部位,如用腿奔跑、用手抓握。在研究中,蝎子机器人就是一个典型的例子,它的不同部位能够独立运作,互不干扰。上图展示了蝎子MSSM的尺寸和结构设计,黑色和红色分别代表干凝胶区域和干凝胶去除区域,最小子结构宽度为30μm。蝎子的钳子和尾部区域通过干凝胶材料响应相对湿度和温度的变化,从而实现形状变形。相比之下,没有被干凝胶覆盖的八条腿则完全由施加的磁场驱动。这种独特的设计使得蝎子MSSM在运动过程中能够发生形状转变。
为了驱动蝎子形机器人在特定环境中移动,研究团队按照定义信号,通过调制外部磁场来驱动腿。在X-Z平面上施加均匀磁场,使身体向前倾斜,确保只有腿尖与表面接触。同时,垂直于均匀场施加正弦磁场,引起从左到右的振荡运动。这种巧妙的设计使蝎子MSSM能够展现出色的运动能力,同时保持腿、钳子和尾巴之间的独立功能。基于干凝胶的形状变形能够实现环境响应,而磁驱动则控制腿部运动以进行运动。
▍微型智能“电工机器人”:逻辑电路调控与狭窄管道内电路修复
在该项研究中,研究团队还充分利用LIG层的出色导电性,成功将微型软体机器人与柔性电子相结合,并据此开发出了具备环境自适应能力的逻辑电路调控机器人,以及能在狭窄管道内进行电路修复的机器人。
具有原位形状可重构性的MSSM,能够在多种工作环境(包括相对湿度、温度和磁场)下执行电子应用。如下图所示,这种MSSM能够作为自驱动电路开关,其结构被划分为两个模块:磁性模块(响应磁场)和干凝胶模块(响应相对湿度和温度)。为了确保电路连接的有效性,研究团队采用了银浆来降低接触电阻。下图B展示了电路设置,其中MSSM与电线接触并连接不同颜色的灯泡,以响应不同的刺激。下图C描绘了MSSM的四种不同配置,每种配置都能产生不同的信号。
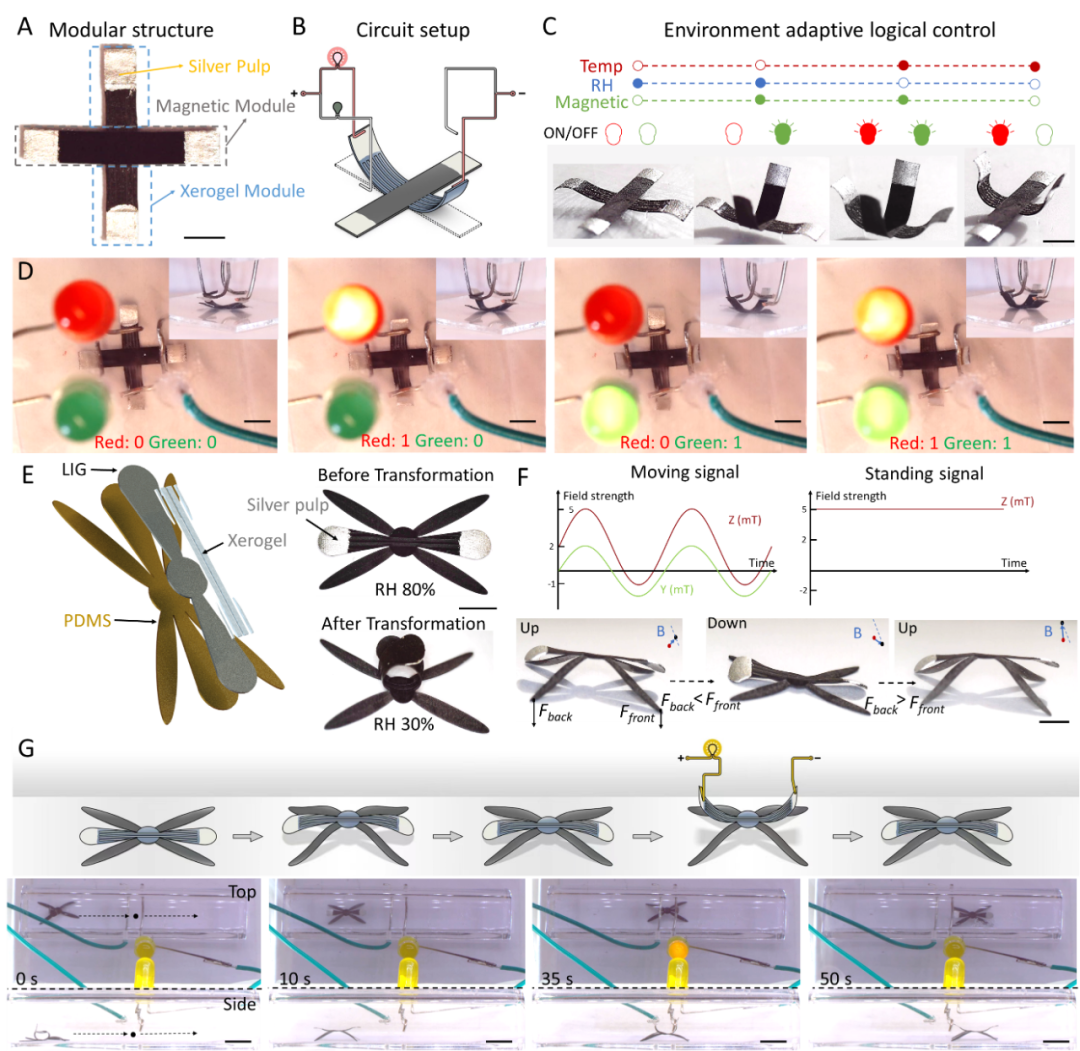

(逻辑电路控制与电路修复应用展示)
在高相对湿度环境中,MSSM保持平坦,两个灯泡保持关闭。在有磁场的高湿环境中,磁性模块弯曲,激活绿色灯泡。在有磁场的高温环境中,干凝胶和磁性模块都会弯曲,激活两个灯泡。当移除磁场时,只有干凝胶模块弯曲,点亮红色灯泡。上图D详细解释了基于环境条件的自适应逻辑控制过程。
除了作为自适应开关,MSSM还能作为电路维护机器人。上图E展示了MSSM的结构设计,其中LIG、干凝胶和PDMS层分别用黑色、灰色和橙色表示。MSSM的手臂保留了响应相对湿度和温度变化的形状变形能力。上图F揭示了MSSM的运动机制和磁控制,其运动类似于毛毛虫的循环模式。这使得MSSM能够在狭窄的管道中导航,并自动修复损坏的电路,如上图G所示。
▍关于未来
在被询问对于这款具有多物理场响应解耦能力的智能微型软体机器人的观点时,研究团队的成员们一致赞同地表示:“得益于我们研发的多样化可编程分区加工策略以及创新性的力学结构设计,这款微型软体机器人呈现出了卓越的操作灵活性和功能丰富性。展望未来,我们将持续深入研究并发展多功能一体化智能微型软体机器人的可编程设计和功能性应用,致力于推动微型软体机器人技术在实际应用中的实施与普及。”
▍关于X-robot
X-robot是中关村机器人产业创新中心与机器人大讲堂联手打造的权威性信息发布品牌专栏,集前沿探索、产业研究、知识普及于一体,致力于积极推动新质生产力的生成与发展,助力我国乃至全球机器人行业的蓬勃繁荣。X-robot立足国际化视野,通过全方位、多角度的挖掘与追踪,生动展现机器人前沿技术与尖端成果,为学术界、产业界及公众提供一个洞见未来、共享科技的重要窗口。
参考文章:https://www.pnas.org/doi/10.1073/pnas.2320386121



