
2024年3月20日,中科深谷发布自主研发的人形智能机器人“COMAN ONE”。
“COMAN ONE”是基于深谷核心产品“CSPACE实时仿真控制系统”研发,包含人形机器人本体、环境感知系统、自主决策系统三部分组成。
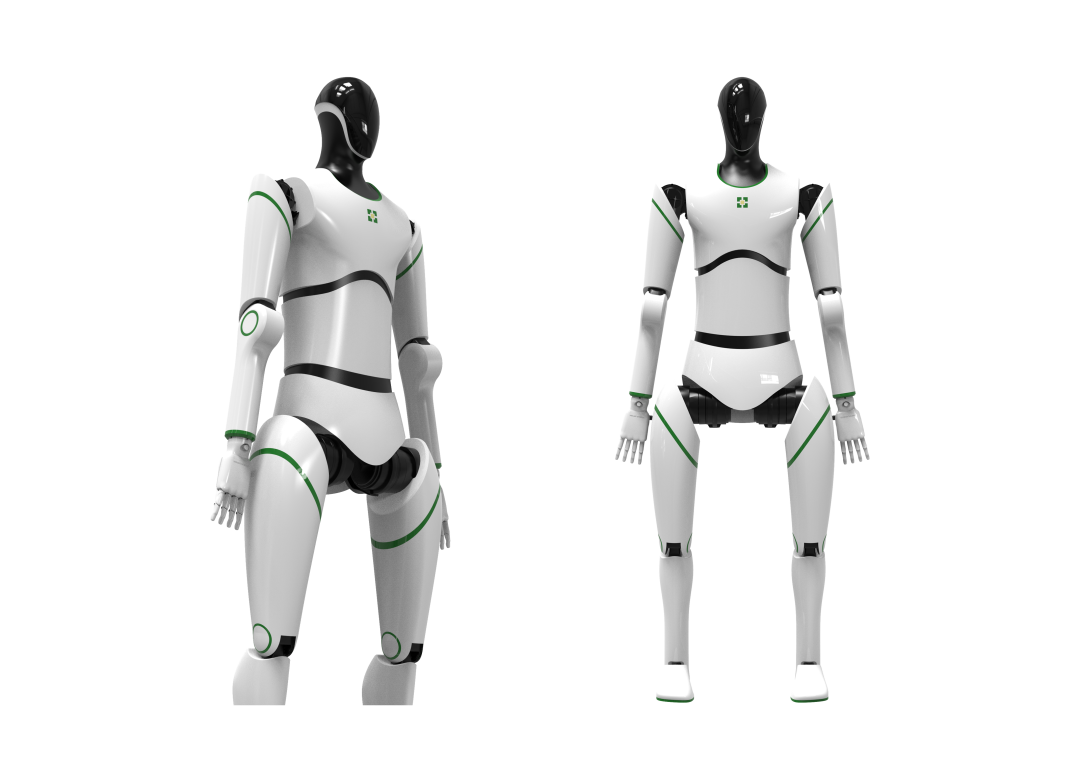
“COMAN ONE”本体共有30个自由度,上肢单个手臂由四自由度关节与六自由度灵巧手组成,下肢由三自由度腰部及五自由度机械腿组成。每个旋转关节由高精度减速机、伺服电机、高精度编码器和伺服驱动器构成。另包括开源控制系统、传感器、上位机和电源及智能算法。
“COMAN ONE”人形机器人研发是依托深谷核心产品“实时仿真控制系统CSPACE”,是采用基于模型设计的先进工程方法“Model-Based-Design”设计,通过构建精确的系统控制模型,实现底层人形机器人步态规划与运动算法,快速高效完成对象的高精度控制。

“COMAN ONE”人形机器人使用全自主研发的运动学和动力学控制算法和软硬件控制系统,内置丰富的运动学、动力学控制、步态控制模型与算法,支持上肢关节空间和笛卡尔空间轨迹算法实验、下肢腿部步态规划、运动控制、伺服电机控制、灵巧抓取作业、类人形机器人协调运动实验、类人形机器人抓取搬运实验等实验。同时,配置了视觉传感器、激光雷达等多类别传感器,支持强化学习、视觉检测和目标识别、导航、避障等功能研究。
▍“COMAN ONE”人形机器人产品特点
1.“COMAN ONE”是良好的开源具身智能载体。可支撑机器人建模仿真、电机驱动和运动控制、机器人运动学及控制、机器人动力学及控制、步态控制、平衡控制等教学实验,以及科研领域的算法验证实验和视觉、导航、避障综合应用等高级应用的控制实验等。
2.控制系统开放。深谷人形机器人控制系统有 TI DSP、ARM、FPGA、x86 工控机可选,提供 CAN(可升级为 EtherCAT)总线、RS232、RS485 通讯控制接口,控制周期可以小到 1ms,均采用 Matlab/Simulink 软件进行编程,支持基于模型设计的开发方法进行开发,可以更好更快地研究高级自动控制算法。
3.算法丰富。平台提供了丰富的机器人运动学、动力学、步态控制和平衡控制案例,方便地掌握人形机器人控制系统的技术,进行更深入的研究。
4.可拓展性强。平台可支持进行参数辨识、柔顺控制、拖动示教、碰撞保护等高级动力学算法和机器人关键技术的开发。
中科深谷长期致力于人工智能先进技术、高端智能装备研发与产业化应用,多年来深耕技术底层,在实时仿真控制系统、驱控一体化关节等方面做了较为深厚的沉淀,拥有安徽省“人机协作智能机器人”重点实验室。本次“COMAN ONE”人形机器人发布是中科深谷向业界展现了自己在核心技术上的积累和创新实力。未来,在政策、技术、生态多维度赋能下,中科深谷将围绕本体结构、智能算法、应用场景、量产落地等关键领域,与深谷众多生态伙伴联合,共同加速推动通用人形机器人的市场潜力释放。

▍基于CSPACE实时仿真控制系统开发人形机器人的优势
CSPACE实时仿真控制系统是一套集仿真、控制、测试、验证于一体的实时控制系统,具备分布式网络、高扩展性、高灵活性等特点,通过丰富的高性能插件可以快速接入各种真实物理接口,满足多学科、多领域、多行业应用需求,采用基于模型设计方式实现低代码仿真开发应用,主要解决两大问题:第一,半实物仿真中快速控制原型的搭建,完成对真实被控对象的控制;第二,通过高精度建模模拟被控对象,实现控制、功率等硬件在环仿真控制。用于人形机器人系统仿真和控制,旨在为机器人研究和开发提供强大的仿真与开发工具。通过提供一个可扩展、易用的软件框架,方便研究人员和开发者能够快速搭建和测试机器人控制系统。通过实时仿真控制系统技术,可以面向特定应用场景,构建仿真系统和训练环境,加快技术迭代速度,降低创新成本。
主要特点体现在以下几个方面:
01通用性、安全性和可控性
在仿真环境中,可以对机器人进行各种危险的操作测试,而不必担心真实环境中的安全风险。这使得研究人员可以更加大胆地进行实验,探索机器人的极限性能和应对复杂情况的能力。
02成本效益高
机器人仿真系统可以大幅减少实际物理样机的需求,从而降低研发成本。在仿真环境中,可以在机器人的设计和编程阶段就发现和解决问题,避免了物理样机阶段可能出现的昂贵修改和重新设计。
03效率提升
快通过仿真,研究人员可以在虚拟环境中快速迭代和优化机器人的设计和程序,这比在现实世界中进行物理测试要快捷得多。这样可以大大缩短机器人从
设计到部署的时间周期。
04交互性和可视化友好
仿真系统通常具有高度的交互性和可视化能力,这使得研究人员和开发人员可以直观地理解和分析机器人的行为。这种直观性对于教育和培训尤其重要,可以帮助操作者更好地理解机器人的操作和编程。
05灵活性和可扩展性强
仿真环境可以根据需要轻松地进行修改和扩展,可以模拟不同的环境和任务,适应各种研究和应用需求。
06验证和优化便捷
在仿真环境中,可以对机器人的运动学、动力学、控制算法等进行精确的模拟和分析,从而验证机器人的性能并对其进行优化。
07应用广泛
产品可以作为研发者的工具,为研发者提供一个安全、可控的开发环境,帮助他们快速掌握机器人开发详细开发流程和提升产品开发能力。
来源:中科深谷



