
经过专门设计的海洋机器人,可以承受海洋深处的高压、低温和挑战性条件,在深海探索和水下修复等极端环境中扮演着至关重要的角色。然而,这一领域的发展同时也面临着一个难题:专业海洋机器人的市场需求较为有限,导致它们的生产缺乏规模经济效应。
模块化机器人技术,将建构主义与自动化的核心理念融为一体,致力于打造高度可定制、部件可互换的机器人体系。在这一创新概念中,电机、传感器、执行器等每一个组件都是独立的模块,能够简便地组装和重组,以构建复杂而高效的机器人系统。这种灵活性和适应性使得面向特定小众市场的海洋机器人在多样化的应用场景下,能够显著提升资源利用效率并降低成本,也因此模块化设计正日益成为海洋机器人研究与发展的主导趋势。
但同时,由于水下模块化机器人必须耐受水下恶劣环境的严酷考验,因此其在设计和构造上面临着严峻挑战。为了解决这一问题,许多海洋科学家和工程师正在尝试将机器人的不同舱室部分进行模块化设计,通过使用防水连接器实现连接,并在陆地上完成舱室间的配平工作,之后才能将其部署于水中进行任务。这一过程相当复杂,因此,如何简化海洋机器人的组装过程,使其像玩积木一样直观易行,成为行业内亟待解决的难题。
▍全球首个?可实现水下组装!
前不久,来自浙江大学的研究团队对此项挑战发起攻关。他们从马里亚纳海沟自供电软机器人的成功下潜中汲取灵感,意识到采用软凝胶材料可以实现深海级的密封效果。基于这一发现,该团队设计了一种简便可重复的水下立方体模块ROBO-ONE,通过简单组装和重新配置,即可构建出多种形态的水下机器人,用于执行水下导航等任务。
值得一提的是,与大多数其他海洋机器人不同的是,浙大研究团队推出的水下机器人ROBO-ONE无需在陆地上组装和连接、也无需在下水前进行配平操作,它们能够在水下直接开始运作。而在维修方面,传统海洋机器人通常需要被打捞上岸才能进行维护,而浙大研究团队开发的水下机器人ROBO-ONE则实现了全球首创的在水下进行部件重组的能力。这不仅是‘潜水’作业,它们还能在水生环境中进行拼装和重构,真正做到了如鱼得水的‘水生’机器人。

该研究成果的相关论文以“Cubic Marine Robotics”为题发表在《Nature Reviews Electrical Engineering》杂志上。浙江大学电气工程学院周晶教授为论文的第一作者和通讯作者,浙江大学航空航天学院李铁风教授为论文共同通讯作者,浙江大学电气工程学院何湘宁教授及课题组胡斯登教授为论文的合作者。浙江大学是论文的唯一作者单位。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍水下立方体模块如何制成?
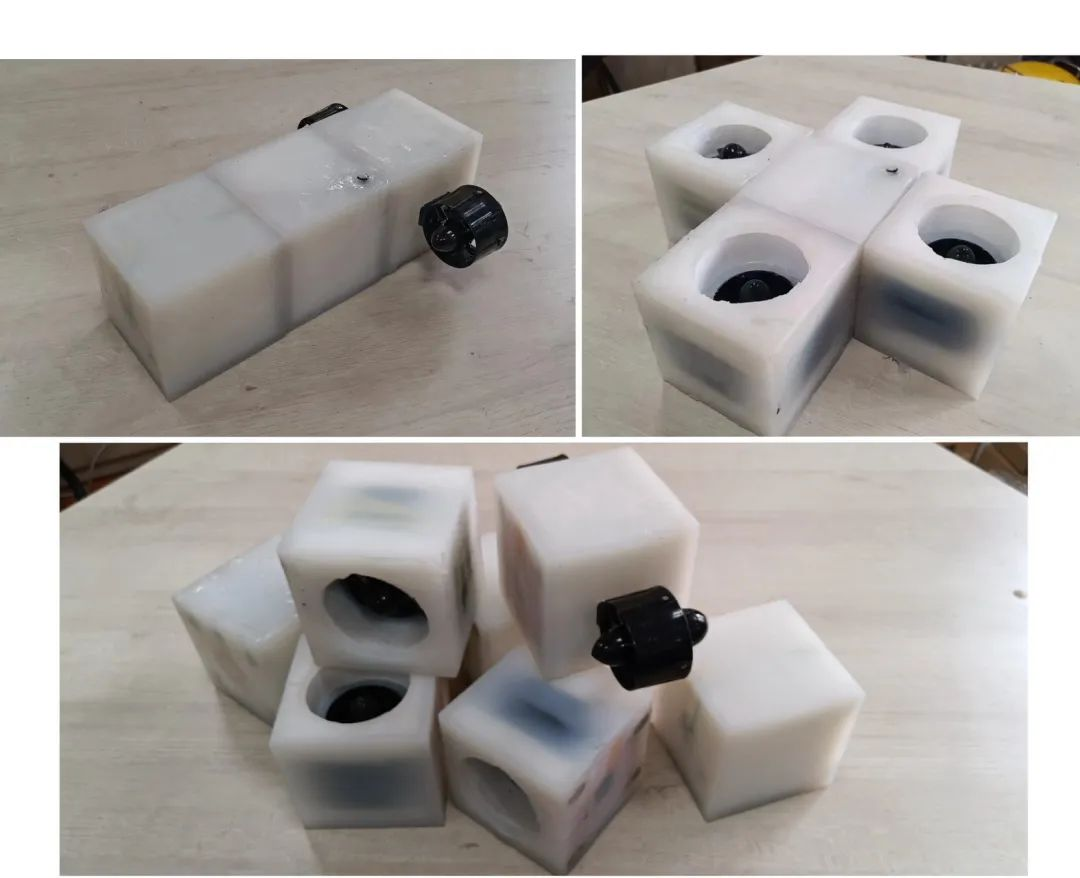
据了解,浙江大学研究团队研发的这一类似魔方的水下机器人由水下立方体模块ROBO-ONE组成。
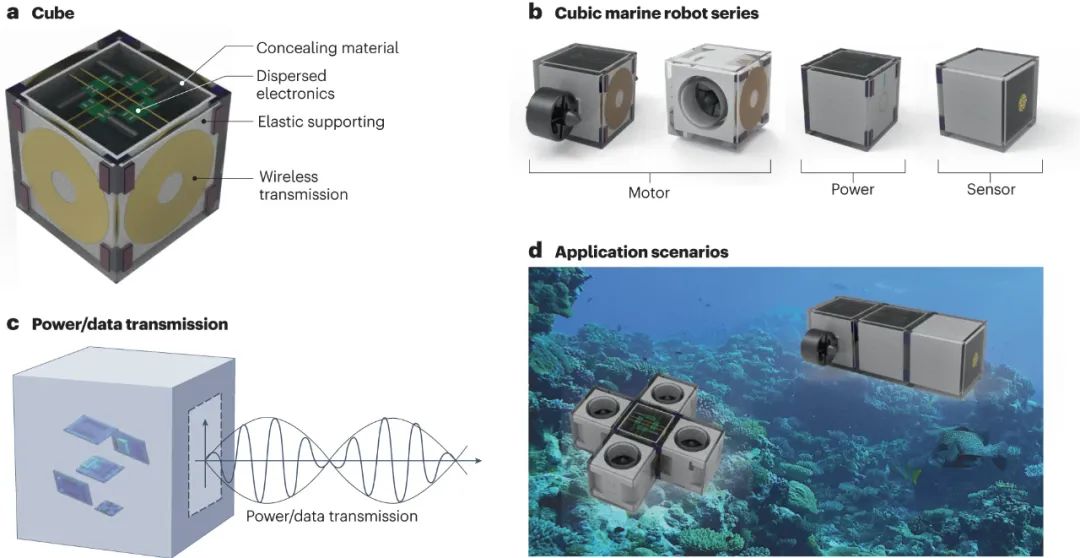
这些模块由一系列可互换的胶质立方体构成,每个都可根据需要装配不同的功能组件,如电源、传感器或驱动电机。电路板被巧妙地设计成较小的部件,以降低应力集中并保持与电路拓扑结构的一致性。
模块之间通过两到四个设计为接触面的侧面进行连接,这些接触面配备有磁铁以便于模块之间的快速锁定。在不同模块之间,能量和信息通过电磁耦合进行交互,例如,电力和控制信号可以从一个模块传输至另一个。这种设计允许功率从供能模块流向执行模块,而无需物理连接,这进一步促进了机器人的自主操作。
尽管无线电力和数据传输的融合为海洋机器人的操作带来了前所未有的便利,但这一设计同样引入了一系列技术挑战。
在海水这一导电介质中,能量吸收和散射的问题变得尤为突出,这些因素都会影响无线电能传输的效率。面对这些挑战,研究团队采取了定制化的解决方案,成功解决了水下环境中电力和数据无线传输的技术难题。
通过精心设计的系统,该团队不仅克服了与功率要求差异、能量在海水中的吸收和散射相关的问题,还实现了模块间高效的能量和信息交换。这使得“魔方”水下机器人能够在水中进行简便的组装和重构,极大地提高了机器人系统的灵活性和适应性,为深海探测和作业提供了新的可能性。
▍水池实验小试牛刀
在深海测试之前,研究团队对“魔方”水下机器人ROBO-ONE的功能操作进行了细致研究。通过对水下立方体模块间的电磁场分布进行精确模拟,并综合考虑海水的电导率,研究团队实现了发射线圈和接收线圈之间的最佳交互。每个模块接触面内嵌的磁性吸附块,极大简化了组装过程并确保了连接的稳定性。
视频1:AUV水下机器人
在实验水池中,研究团队对这些模块进行了一系列的功能性测试,以监测并确保组装过程的顺畅和机器人的稳定运作。初步实验显示了不同配置下的有可靠的成果:将传感器模块与电源模块相连,并置于水面下,一旦对接成功,传感器模块即刻被激活。这种设计允许接触面无方向性地自由旋转,极大地提升了模块间连接的灵活性。
除了感知能力,运动控制同样至关重要。通过在电源模块的一侧添加传感器模块,另一侧添加电机模块,"魔方"水下机器人ROBO-ONE能够实现定向移动,类似于传统的自主水下航行器。进一步地,通过将多个电机模块对称地环绕电源模块布置,机器人便具备了垂直起降的能力,仿佛是水下版的无人机。
视频2:水下“无人机”
这些实验不仅证实了“魔方”水下机器人ROBO-ONE在设计和功能上的创新,也展现了其在实际海洋环境中进行自我重组和重构的巨大潜力。
▍优化制作面向量产
经过一系列初步的实验室测试,研究团队开始着手解决将“魔方”水下机器人ROBO-ONE从小规模实验和原型开发转向大规模生产所面对的挑战与机遇。为了实现这一目标,他们首先对适合批量生产的材料和部件进行了审慎的评估和选择,权衡了成本、可获得性以及性能等关键因素。
在对电子组件进行了一系列严格的定期测试之后,研究团队筛选出了那些即便在预期的工作负荷下仍能保持稳定性能的高质量元件。此外,他们还研发了一种新型树脂材料配方,专门用于封装电路板,这种材料极大地增强了其对海水腐蚀和微生物附着的抵抗力。
为确保组件在模块中的正确定位,研究团队设计了一个既薄又具弹性的内支撑结构。他们还为每个立方体模块设计了专用模具,并指定了适宜的操作温度和粘合工艺,从而确保了最终产品在结构上的一致性和可靠性。这些细节至关重要,它们确保了在扩大生产规模的同时,不会牺牲产品的性能和稳定性。
在经济可行性方面,研究团队正仔细评估“魔方”水下机器人ROBO-ONE技术的大规模生产所涉及的成本、市场需求以及潜在的投资回报。目前,研究团队正在深入分析生产成本,同时考虑市场动态和潜在商业机会,以确保技术转让和商业化过程中的经济效益。
随着技术原型的不断成熟,研究团队正迈向启动技术转让的关键阶段。在此过程中,浙江大学技术转移研究院将扮演重要角色,提供专利评估与转化流程的专业支持。预计专利权将作为一项知识产权资产进行评估,并有望作为资本注入,纳入未来公司的股权结构当中。
整个从实验室到工业生产的转换过程需要研究专家和工程专家之间的紧密合作,这包括部署优化的生产流程、协调供应链活动以及持续监控产品质量,以确保技术创新能够成功走向市场。
参考文章:
https://www.nature.com/articles/s44287-024-00030-z
如需咨询企业合作事宜,欢迎联系堂博士(13810423387,手机与微信同号)进行对接。
----------------END----------------


工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 节卡机器人 | 珞石机器人 | 法奥机器人 | 非夕科技 | CGXi长广溪智造 | 大族机器人 | 越疆机器人 | 睿尔曼智能 | 优艾智合机器人 | 阿童木机器人 | 盈连科技
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康
人形机器人企业
优必选科技 | 宇树 | 达闼机器人 | 云深处 | 理工华汇 | 傅利叶智能 | 逐际动力 | 乐聚机器人 | 星动纪元 | 天链机器人
核心零部件企业
绿的谐波 | 因时机器人 | 脉塔智能 | 伟景智能 | 锐驰智光 | 地平线 | 本末科技 | NOKOV度量科技 | 青瞳视觉 | 因克斯 | 蓝点触控 | 福德机器人
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群,共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募,添加微信“robospeak2018”入群!
兼职作者&投稿
机器人大讲堂正在招募【兼职内容作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可以将简历和原创作品投至邮箱:liuzk@leaderobot.com
我们对职业、所在地没有要求,欢迎朋友们的加入!


看累了吗?戳一下“在看”支持我们吧



