
近日,一则关于双足机器人创造400米新纪录的消息刷爆了科技圈。只见这个名叫Cassie的"机器人运动员",在听到发令枪响的那一刻,就如离弦之箭般冲了出去。
它那"健步如飞"的身姿,灵活敏捷的动作,简直令人瞠目结舌。因为此时的Cassie已经把人类跑步者远远甩在了身后。
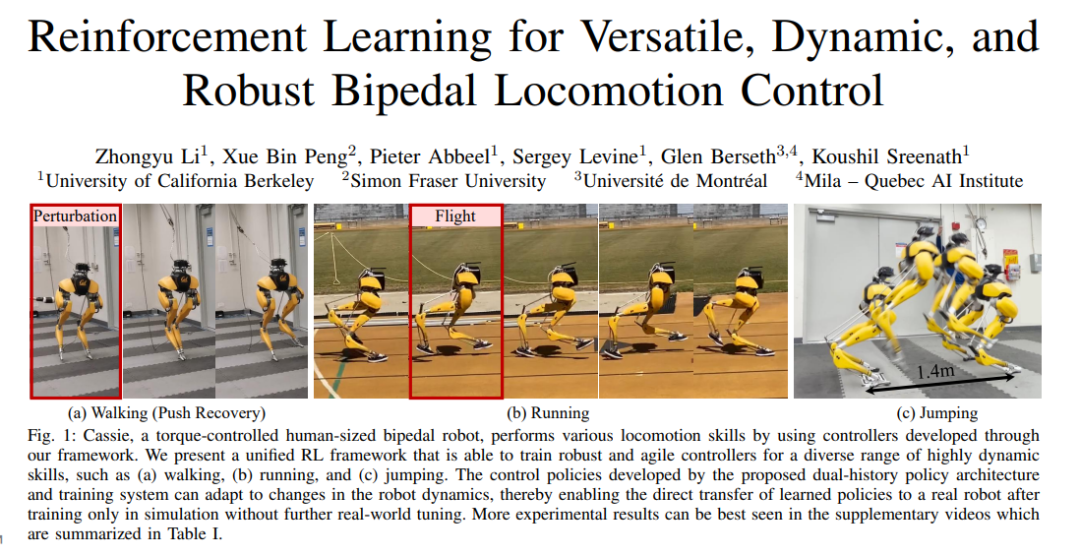
终点线前的最后几步,Cassie更是爆发出了惊人的能量,以一个漂亮的"冲刺"姿势,一举冲过了终点线,计时器最终定格在2分34秒!这个成绩,甚至超越了人类的平均水平!

事实上,Cassie在这次创纪录的表现中,展现出的是高达每分钟155.6米的惊人步速。而就在两年前,它在完成5公里户外长跑时,配速为每分钟94.3米。
除了奔跑,Cassie的跳远成绩同样亮眼。在没有经过专项训练的情况下,它跳出了1.4米的好成绩!
▍揭秘Cassie的"超能力"
Cassie的惊艳表现,离不开其背后先进的技术支撑。那么,是什么让Cassie如此与众不同呢?
论文地址:https://arxiv.org/pdf/2401.16889.pdf
首先,Cassie拥有独特的机械结构设计。它的腿部采用了类似于人类小腿和脚踝的设计,具有更大的关节活动范围和柔韧性。这种仿生学设计使得Cassie能够更自然、更灵活地进行各种运动。同时,Cassie的身体各部分也经过了精心的优化,实现了重量的最小化和强度的最大化,为其卓越的运动表现提供了硬件基础。
其次,Cassie搭载了大量的传感器和计算设备。它全身上下分布着各种类型的传感器,如惯性测量单元(IMU)、关节角度传感器、力传感器等。这些传感器实时收集Cassie运动过程中的各种数据,让它能够全面感知自己的状态和周围环境。同时,Cassie还搭载了高性能的嵌入式计算机,可以快速处理这些海量数据,并根据算法实时生成运动控制指令。
然而,Cassie真正的"超能力"来自于其革命性的运动控制算法。与传统的机器人控制方法不同,Cassie采用了基于深度强化学习(RL)的控制策略。
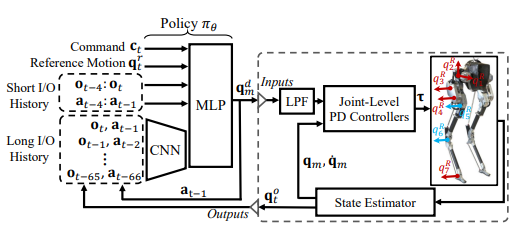
研究团队开发了一种的创新控制器架构,称为"双历史架构"。这个架构的独特之处在于,它同时利用了机器人长期和短期的输入/输出(I/O)历史数据。
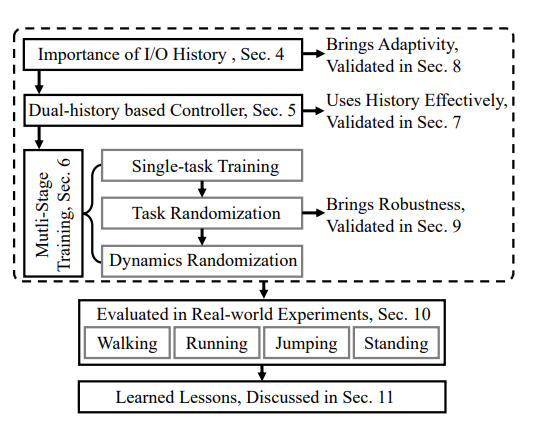
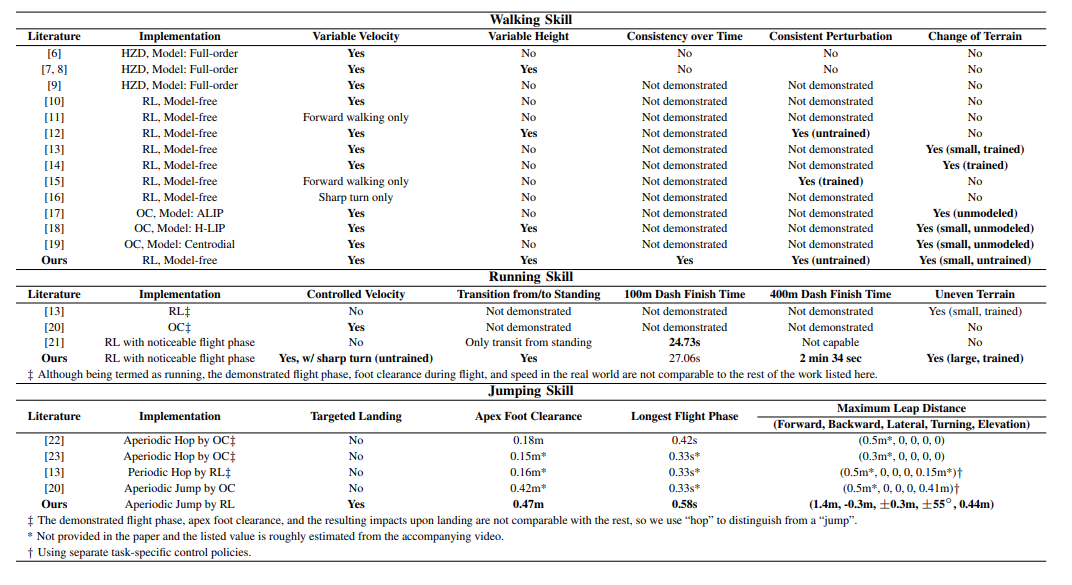
通过端到端的强化学习方法进行训练后,这种控制架构在各种任务上,都展现出了优于其他方法的性能。此外,该RL系统还具备出色的适应性和鲁棒性。
研究表明,通过有效利用机器人的I/O历史记录,该架构能够适应各种变化,如接触事件等。
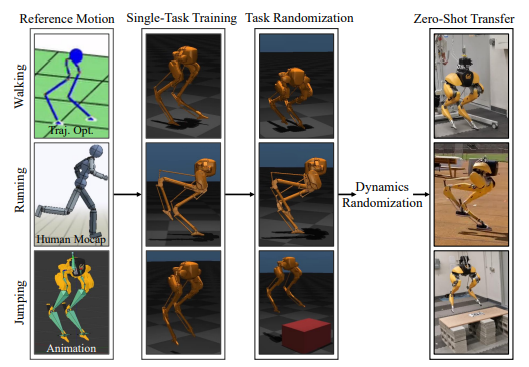
借助这个多阶段的训练框架,研究团队成功获得了一种通用的控制策略。这种策略能够实现零样本迁移,直接应用于现实世界的机器人系统,而无需额外的调整或训练。
同时,Cassie还具备快速的反馈控制能力,可以根据实际状态与期望状态的偏差,迅速做出调整,确保运动的稳定性和精确性。
最后,Cassie的算法还实现了多技能的无缝切换和融合。在实际应用中,Cassie需要在行走、奔跑、跳跃等各种技能之间灵活转换。Cassie的控制系统可以实现不同技能之间的平滑过渡,并能够在需要时进行技能融合(如在奔跑过程中进行跳跃),展现出更加灵活多变的运动能力。
▍Cassie的"训练秘籍"
Cassie的成功还有赖于一套独特的"训练秘籍"。与人类运动员类似,Cassie也需要通过大量的训练来提升自己的运动能力。但与人类不同的是,Cassie的训练主要是在虚拟环境中进行的。
借助于强大的计算机仿真技术,科研团队为Cassie搭建了一个逼真的虚拟训练场。在这个数字世界里,Cassie可以不受物理条件的限制,自由地尝试各种运动策略和动作组合。通过不断的试错和优化,它逐步掌握了奔跑、跳跃等高难度技能。
更重要的是,在虚拟环境中,科研团队可以为Cassie设置各种复杂的场景和极端的条件,如不平整的地面、强风干扰、意外障碍物等。通过在这些"噩梦"场景中的反复训练,Cassie习得了超强的适应能力和鲁棒性,能够从容应对现实世界的各种挑战。
Cassie基于RL的控制器架构如下图:
下图是基于RL的Cassie运动控制策略架构各种基线的图示:

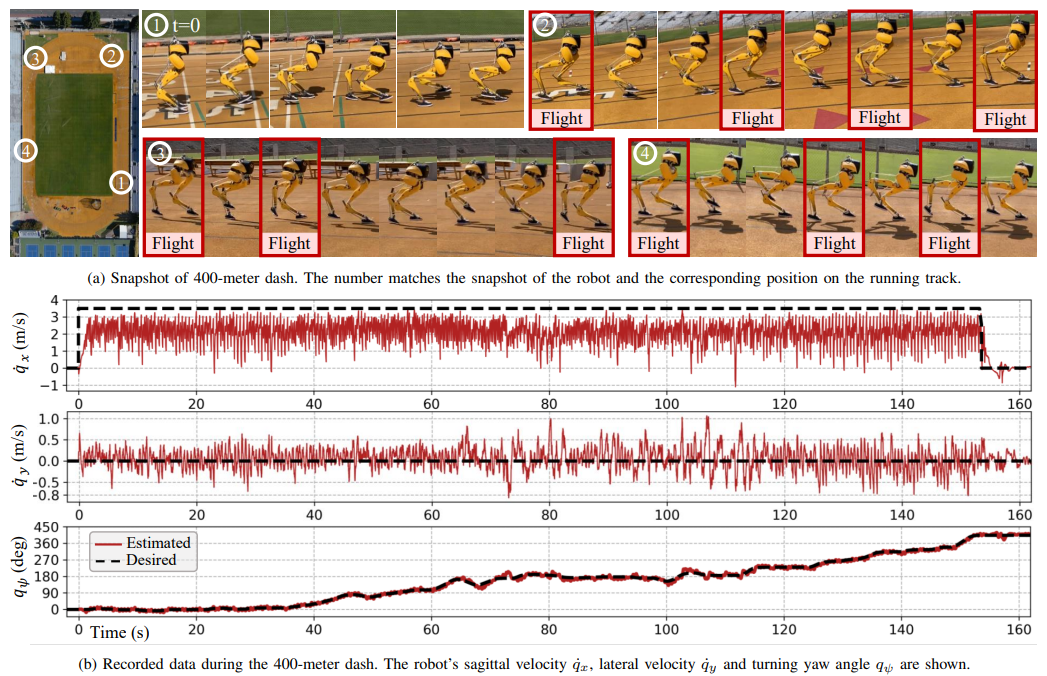
值得注意的是,Cassie利用了一种单一的跑步策略成功完成了此次400米冲刺。这个策略使得机器人能够从静止的站立姿势,快速过渡到高速奔跑的步态。
在400米冲刺中,Cassie的平均速度达到了2.15米/秒,最高速度更是达到了惊人的3.54米/秒。
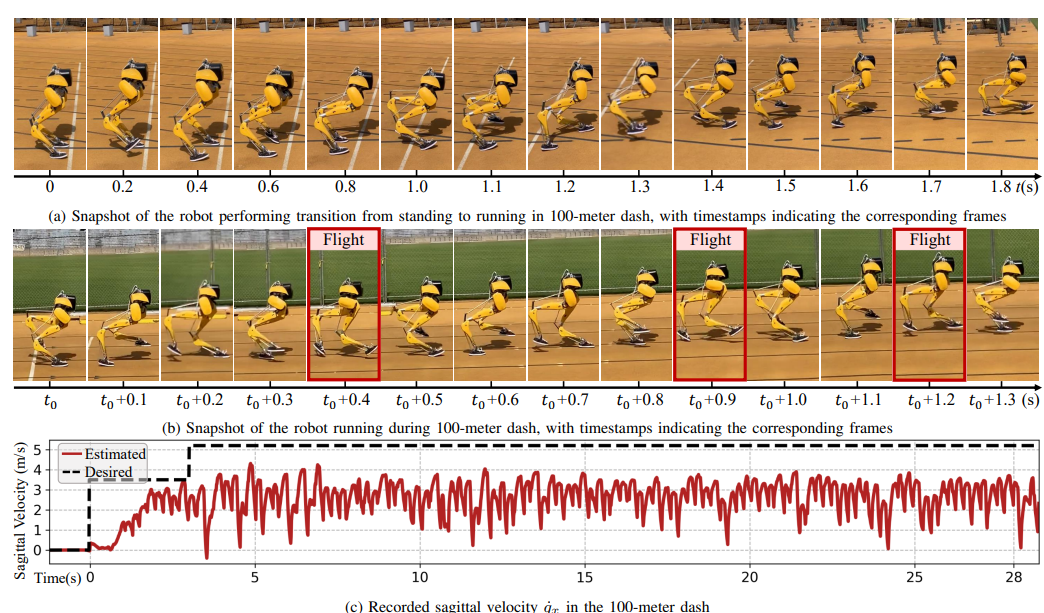
研究团队在这个跑步策略的基础上进行了微调,Cassie随后又以同样快速的跑步步态,完成了100米短跑的挑战。
训练的另一个秘诀,是科研团队为Cassie量身定制的"体能训练计划"。通过对Cassie的机械结构和控制系统进行优化,团队不断提升其运动效率和耐力水平。同时,他们还开发了一套实时监测系统,可以随时掌握Cassie的"身体状况",并根据反馈数据动态调整训练强度和内容。

正是凭借这套独特的"训练秘籍",Cassie的运动能力才能在短时间内实现跨越式提升,最终创造出令世人瞩目的佳绩。而这,也为未来机器人运动能力的提升,提供了宝贵的经验和启示。
▍Cassie的意义与展望
从科研的角度来看,Cassie的成功开发标志着动态双足机器人技术的重大进展。长期以来,双足机器人的稳定控制一直是一个巨大的挑战。Cassie的出现,证明了通过先进的人工智能算法,特别是强化学习技术,我们能够突破传统控制方法的局限,实现高度动态和适应性的机器人运动控制。这为未来机器人技术的发展指明了方向,开辟了广阔的前景。
从应用的角度来看,Cassie所展现的能力,让我们对未来机器人的实际应用充满了期待。想象一下,未来的机器人能够像Cassie一样灵活地在各种环境中运动,那将会给我们的生活带来怎样的变革?它们可以成为我们生活中的得力助手,无论是在家庭、办公室,还是在户外、工厂,都能提供无微不至的服务。它们还可以代替人类执行危险的任务,如抢险救灾、探索未知环境等,为人类的安全和发展做出贡献。
放眼未来,Cassie只是机器人技术发展长河中的一个缩影。随着人工智能、材料科学、能源技术等领域的不断进步,我们有理由相信,未来的机器人会变得更加智能、更加强大,它们将在更广泛的领域发挥作用,与人类形成更加紧密而协调的伙伴关系。而Cassie,作为这一进程中的先行者和典范,必将在历史上留下浓墨重彩的一笔。
如需咨询企业合作事宜,欢迎联系堂博士(13810423387,手机与微信同号)进行对接。
----------------END----------------


工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 节卡机器人 | 珞石机器人 | 法奥机器人 | 非夕科技 | CGXi长广溪智造 | 大族机器人 | 越疆机器人 | 睿尔曼智能 | 优艾智合机器人 | 阿童木机器人 | 盈连科技
服务与特种机器人企业
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康
人形机器人企业
优必选科技 | 宇树 | 达闼机器人 | 云深处 | 理工华汇 | 傅利叶智能 | 逐际动力 | 乐聚机器人 | 星动纪元 | 天链机器人
核心零部件企业
绿的谐波 | 因时机器人 | 脉塔智能 | 伟景智能 | 锐驰智光 | 地平线 | 本末科技 | NOKOV度量科技 | 青瞳视觉 | 因克斯 | 蓝点触控 | 福德机器人
教育机器人企业
加入社群
欢迎加入【机器人大讲堂】读者讨论群,共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募,添加微信“robospeak2018”入群!
兼职作者&投稿
机器人大讲堂正在招募【兼职内容作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可以将简历和原创作品投至邮箱:liuzk@leaderobot.com
我们对职业、所在地没有要求,欢迎朋友们的加入!


看累了吗?戳一下“在看”支持我们吧



