
像蟑螂小强一样的仿生机器人我们介绍过一些,它们一般不仅能够处理复杂的地形,还可以在狭窄的空间中快速移动。
科学家此前设计的仿蟑螂机器人
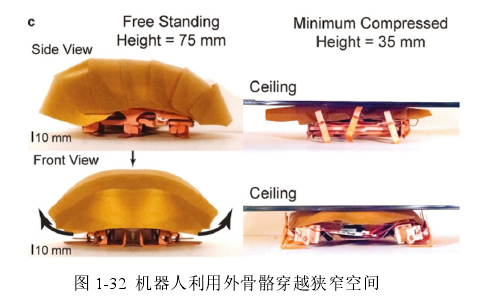
仿蟑螂机器人穿越狭窄空间
▍“半机半虫的机器蟑螂”
如今,昆虫-机器接口(insect-machine interface,IMI)又称昆虫机器人(insect cyborg),成为了动物机器人研究的一个重要分支。人们利用动物体本身的运动机能和动力供应体制,从动物运动的感受传入入手,实现对动物运动的人工控制。
实际上,蟑螂是一种喜欢昼伏夜出的动物,而且它们常常发呆和停滞,如果真用蟑螂作为探测帮手,那么它们的这种行为对于搜索和救援任务似乎不太高效,尤其对于一些搭载了成像设备的蟑螂而言,无法实时获取动态信息。
那么是否可以人为控制蟑螂的运动行为呢?近日,日本大阪大学的研究人员将蟑螂和电子控制模块相结合,将蟑螂改造成“半机械化式”昆虫,通过使用机器学习的自主电刺激,提高半机械化蟑螂的搜索救援效率。(这个改造是不是有美国漫威电影金刚狼注射艾德曼金属内味了。)
这项研究以Movement Optimization for a Cyborg Cockroach in a Bounded Space为题发表于中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems(类生命系统)上。

▍加入改造之旅
首先是对蟑螂身体的改造,研究人员将铂电极植入蟑螂的身体,还为蟑螂设计了一个电子背包,粘在其背部。该电子背包重1.4克,由传感器、无线收发器和微控制器组成,50毫安电池为电子背包提供超过50分钟的电力。同时,蟑螂在整个“手术过程”中处于麻醉状态。
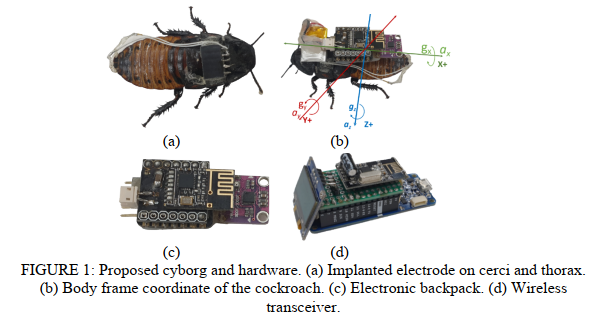
改造的半机械化蟑螂机器人
在这项研究中,蟑螂的加速度和角速率用加速度计和陀螺仪测量,这些数据被无线传输到计算机上,研究人员对这些数据进行实时结算、特征提取和在线分类。此外,研究人员还设计了圆形区域以精确获取蟑螂的位置和运动轨迹,他们发现这些蟑螂更喜欢用触角感知墙壁,并沿着墙壁移动,这得益于它们强大的运动能力。
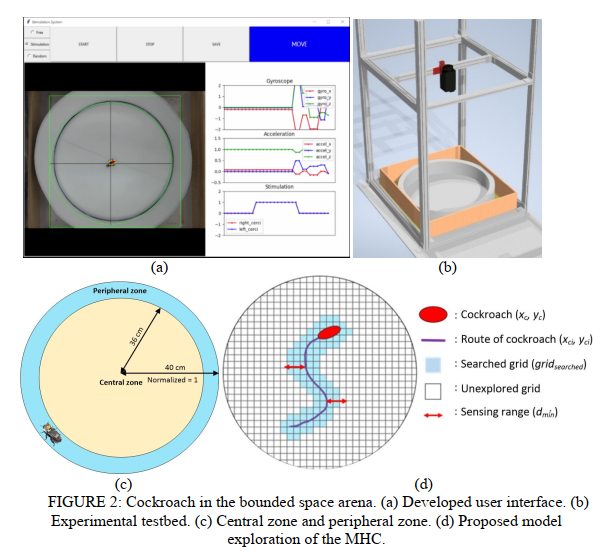
圆形区域的蟑螂运动轨迹跟踪
完成上述工作后,研究人员通过计算机向电子背包发送电刺激指令,控制蟑螂的运动,成功实现了交互,有效减少了蟑螂的“偷懒”时间。
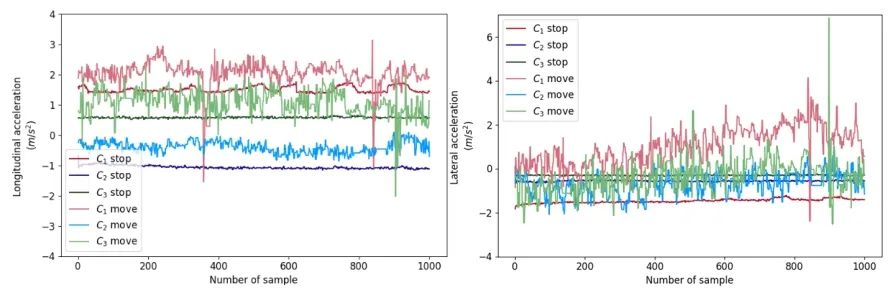
加速计和陀螺仪监测的蟑螂运动数据
但目前还存在一些问题,电子背包的尺寸有限,传感器数量有限。此外,测得的加速度和角速率值包含噪声和偏差,这些噪声和偏差可能随时间而变化。
▍看不见的“鞭子”——机器学习
如果利用上述数据作为机器学习的训练数据,则可以利用机器学习处理蟑螂运动测量中的噪声、漂移和信号偏差等问题,这里面涉及到的技术十分多样,包含计算机视觉、数据采集、电刺激命令发送、特征提取和机器学习分类等。

下图总结了应用机器学习过程的总体框图。研究人员采用了常见的模型LR、NB、KNN和支持向量机(SVM)对蟑螂运动进行了分类。
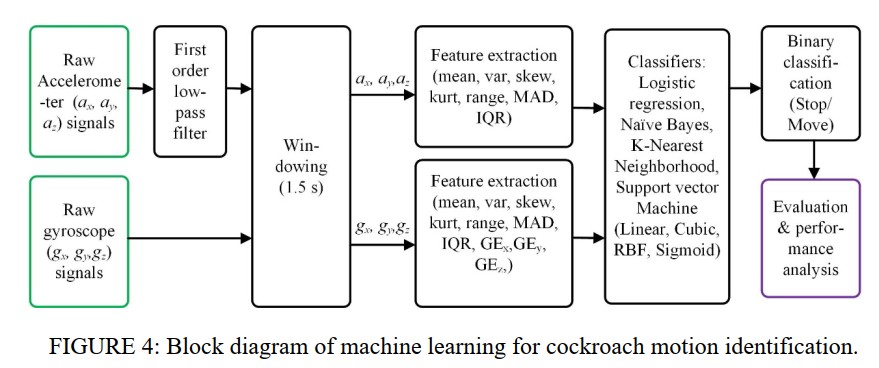
蟑螂运动识别的机器学习框图
如果分类器识别出蟑螂停止运动,只需要1秒,系统就会发出电刺激的指令,使得蟑螂继续运动。
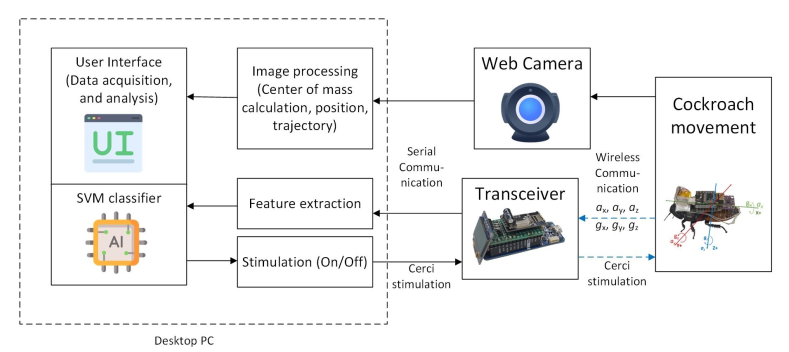
基于机器学习蟑螂电刺激控制示意图

如此操作,蟑螂会不会因过多的电刺激而很容易疲劳?据此,研究人员称会将这种电刺激最小化。
▍“鞭子”的威力如何?
那么实测结果怎么样?
研究人员使用SVM命令的自动电刺激测试了三只蟑螂,只有蟑螂停止不动时,系统将向蟑螂发送电刺激。每次测试重复三次,每次测试进行七分钟,三只蟑螂的电刺激运动结果如下图所示。
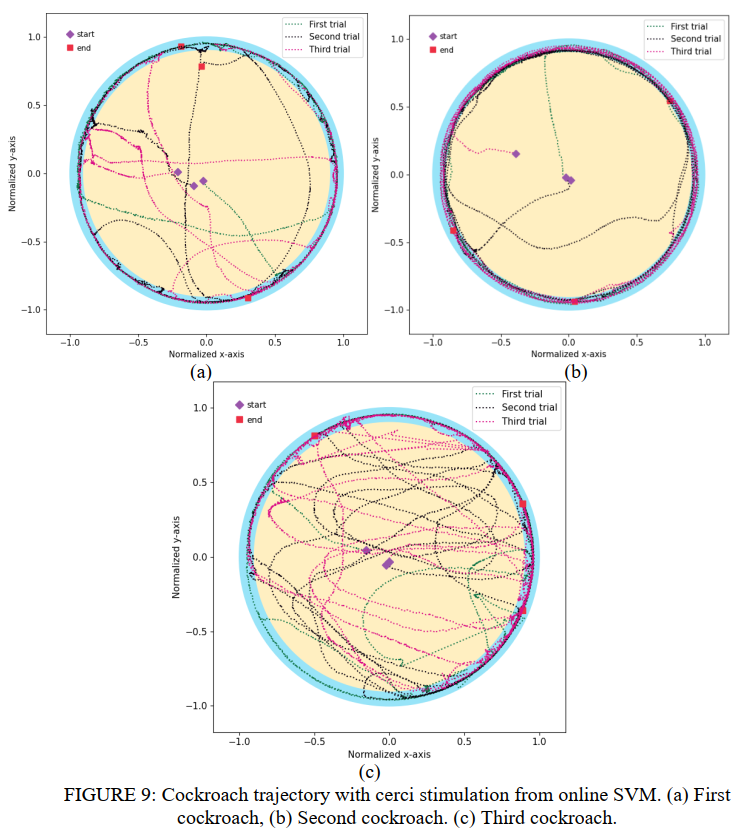
机器学习SVM刺激蟑螂运动
对比于纯靠自觉的运动,这种电刺激激励方式使得蟑螂的搜索率和运动距离分别提高了68%和70%,而蟑螂的“偷懒”时间减少了78%。所有蟑螂的平均电刺激时间为3.4秒,这种短时间内的电刺激显著减少了蟑螂的疲劳。
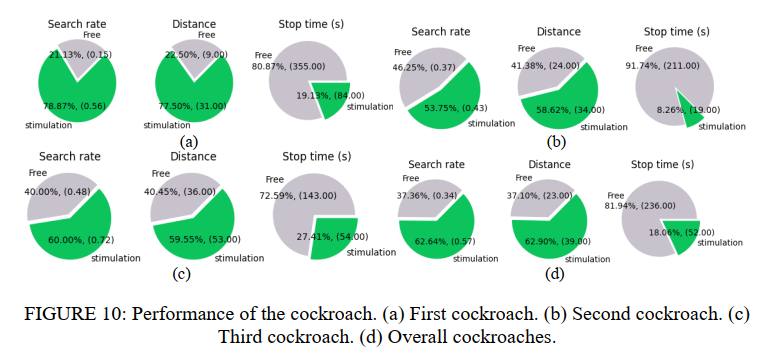
电刺激激励方式下蟑螂的运动性能
▍结语与展望
人们利用昆虫体本身的运动机能和动力供应体制,从昆虫运动的感受传入或者神经支配入手,可实现对昆虫运动的人工控制,但仍然存在着许多问题。从生物学角度来看,所有的昆虫机器人研究都忽略了昆虫本身的运动调控机制,仅仅从简单、随机、人为地刺激入手对昆虫进行简单控制,没有完整的神经生物学理论支撑电刺激与行为动作之间的对应关系。当前,昆虫大脑的结构与功能研究仍然是具有挑战性研究课题。
论文地址:https://spj.science.org/doi/10.34133/cbsystems.0012



